 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYonatan Bisk
Object Goal Navigation with End-to-End Self-Supervision
Dec 09, 2022
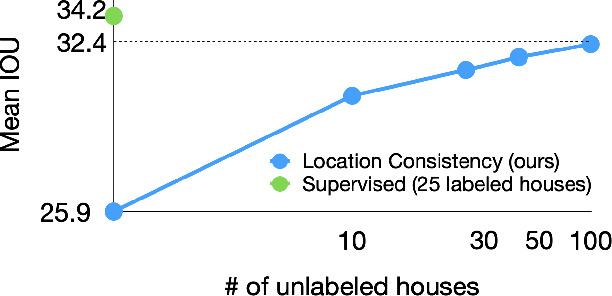
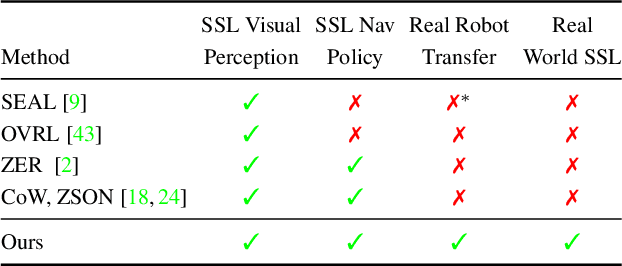
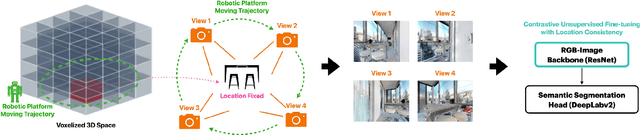
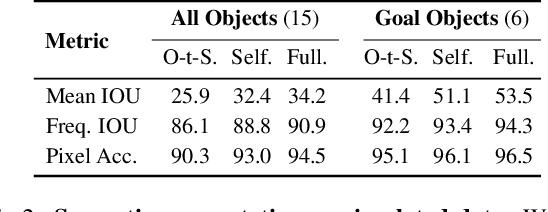
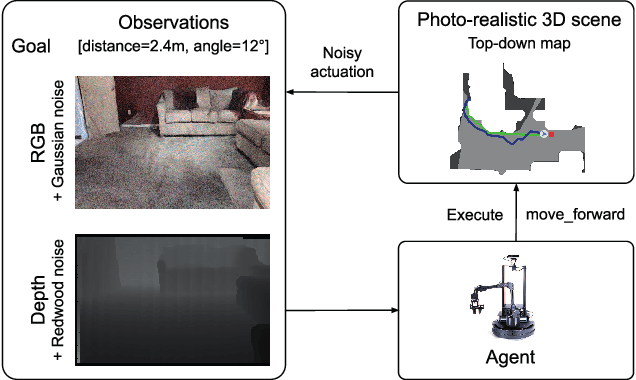
A household robot should be able to navigate to target locations without requiring users to first annotate everything in their home. Current approaches to this object navigation challenge do not test on real robots and rely on expensive semantically labeled 3D meshes. In this work, our aim is an agent that builds self-supervised models of the world via exploration, the same as a child might. We propose an end-to-end self-supervised embodied agent that leverages exploration to train a semantic segmentation model of 3D objects, and uses those representations to learn an object navigation policy purely from self-labeled 3D meshes. The key insight is that embodied agents can leverage location consistency as a supervision signal - collecting images from different views/angles and applying contrastive learning to fine-tune a semantic segmentation model. In our experiments, we observe that our framework performs better than other self-supervised baselines and competitively with supervised baselines, in both simulation and when deployed in real houses.
EvEntS ReaLM: Event Reasoning of Entity States via Language Models
Nov 10, 2022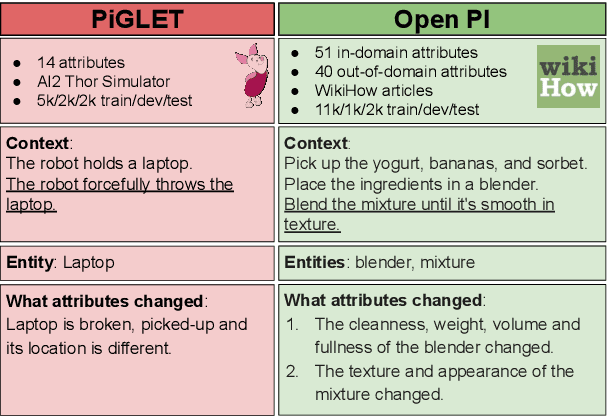
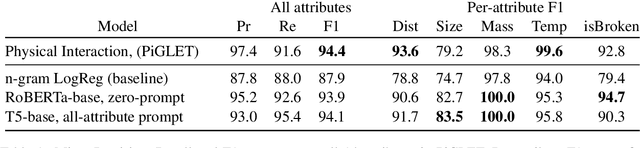
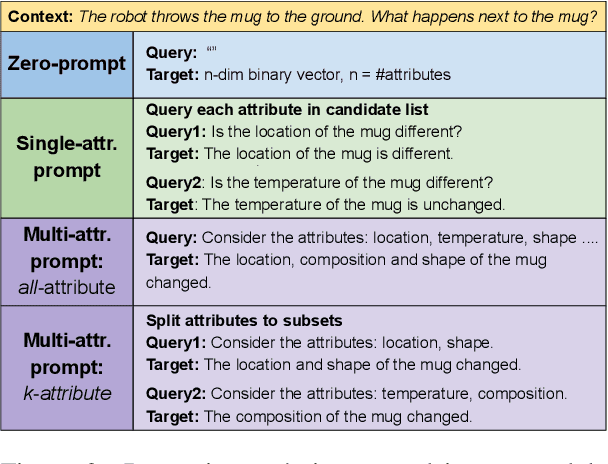
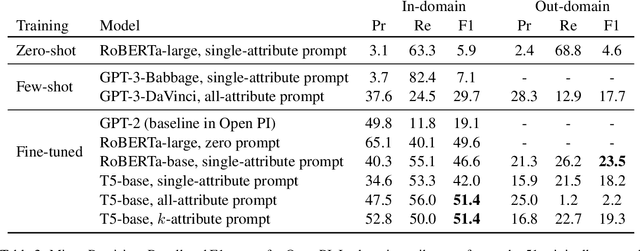
This paper investigates models of event implications. Specifically, how well models predict entity state-changes, by targeting their understanding of physical attributes. Nominally, Large Language models (LLM) have been exposed to procedural knowledge about how objects interact, yet our benchmarking shows they fail to reason about the world. Conversely, we also demonstrate that existing approaches often misrepresent the surprising abilities of LLMs via improper task encodings and that proper model prompting can dramatically improve performance of reported baseline results across multiple tasks. In particular, our results indicate that our prompting technique is especially useful for unseen attributes (out-of-domain) or when only limited data is available.
Retrospectives on the Embodied AI Workshop
Oct 17, 2022
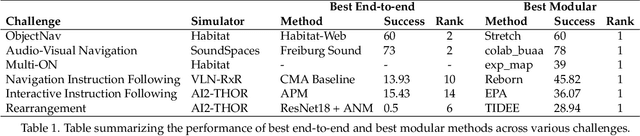
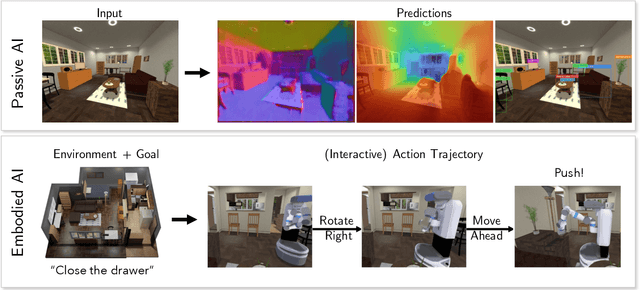
We present a retrospective on the state of Embodied AI research. Our analysis focuses on 13 challenges presented at the Embodied AI Workshop at CVPR. These challenges are grouped into three themes: (1) visual navigation, (2) rearrangement, and (3) embodied vision-and-language. We discuss the dominant datasets within each theme, evaluation metrics for the challenges, and the performance of state-of-the-art models. We highlight commonalities between top approaches to the challenges and identify potential future directions for Embodied AI research.
Don't Copy the Teacher: Data and Model Challenges in Embodied Dialogue
Oct 11, 2022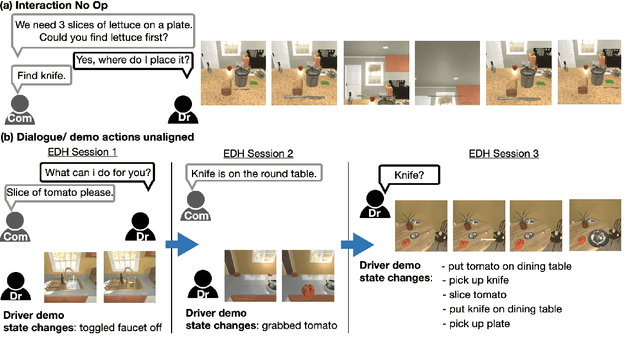
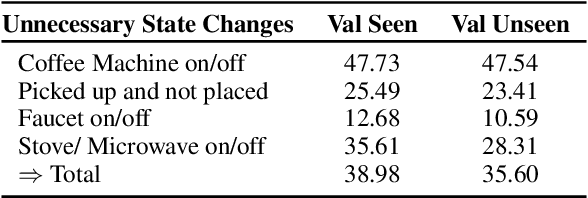
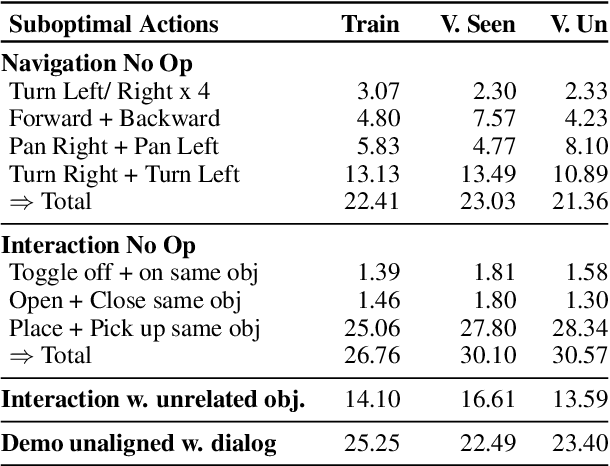
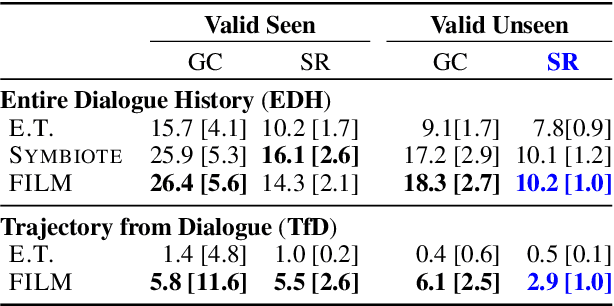
Embodied dialogue instruction following requires an agent to complete a complex sequence of tasks from a natural language exchange. The recent introduction of benchmarks (Padmakumar et al., 2022) raises the question of how best to train and evaluate models for this multi-turn, multi-agent, long-horizon task. This paper contributes to that conversation, by arguing that imitation learning (IL) and related low-level metrics are actually misleading and do not align with the goals of embodied dialogue research and may hinder progress. We provide empirical comparisons of metrics, analysis of three models, and make suggestions for how the field might best progress. First, we observe that models trained with IL take spurious actions during evaluation. Second, we find that existing models fail to ground query utterances, which are essential for task completion. Third, we argue evaluation should focus on higher-level semantic goals.
Transformers are Adaptable Task Planners
Jul 06, 2022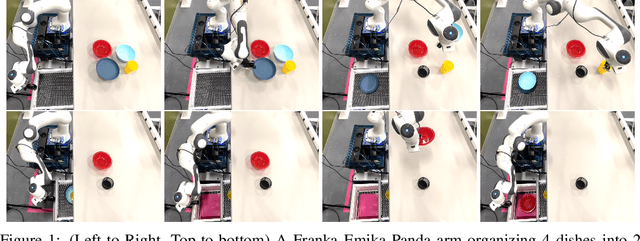
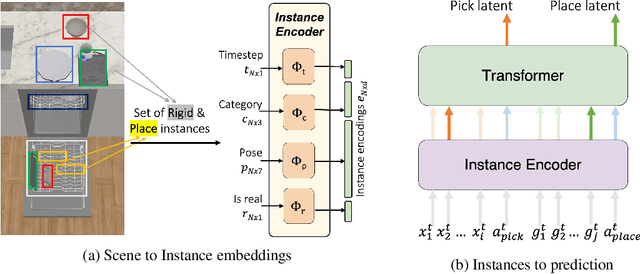
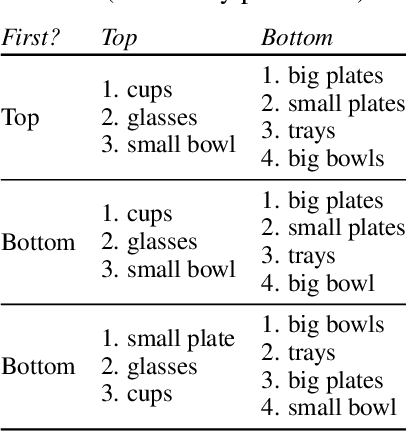
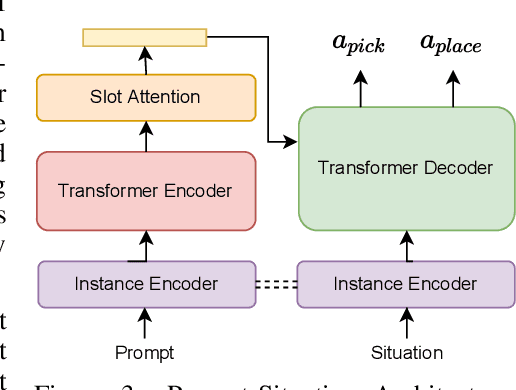
Every home is different, and every person likes things done in their particular way. Therefore, home robots of the future need to both reason about the sequential nature of day-to-day tasks and generalize to user's preferences. To this end, we propose a Transformer Task Planner(TTP) that learns high-level actions from demonstrations by leveraging object attribute-based representations. TTP can be pre-trained on multiple preferences and shows generalization to unseen preferences using a single demonstration as a prompt in a simulated dishwasher loading task. Further, we demonstrate real-world dish rearrangement using TTP with a Franka Panda robotic arm, prompted using a single human demonstration.
On Advances in Text Generation from Images Beyond Captioning: A Case Study in Self-Rationalization
May 24, 2022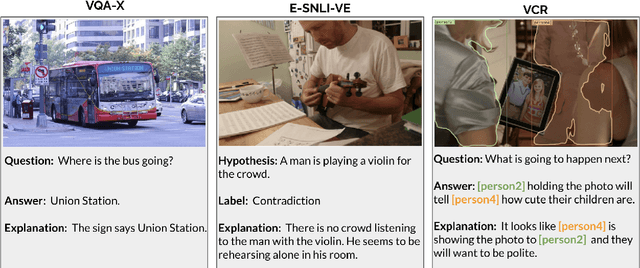
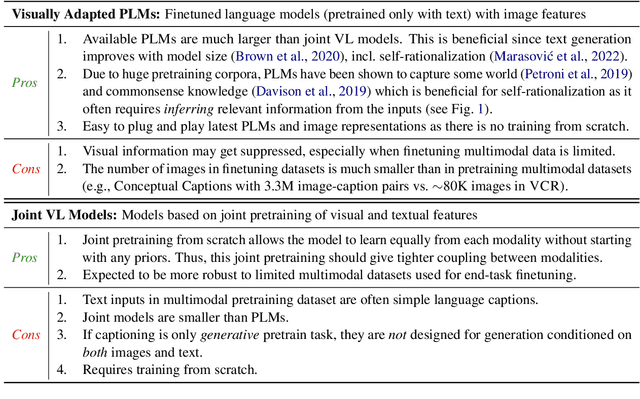

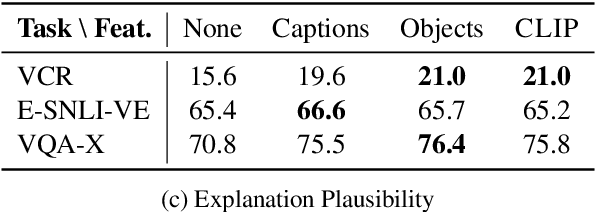
Integrating vision and language has gained notable attention following the success of pretrained language models. Despite that, a fraction of emerging multimodal models is suitable for text generation conditioned on images. This minority is typically developed and evaluated for image captioning, a text generation task conditioned solely on images with the goal to describe what is explicitly visible in an image. In this paper, we take a step back and ask: How do these models work for more complex generative tasks, conditioned on both text and images? Are models based on joint multimodal pretraining, visually adapted pretrained language models, or models that combine these two approaches, more promising for such tasks? We address these questions in the context of self-rationalization (jointly generating task labels/answers and free-text explanations) of three tasks: (i) visual question answering in VQA-X, (ii) visual commonsense reasoning in VCR, and (iii) visual-textual entailment in E-SNLI-VE. We show that recent advances in each modality, CLIP image representations and scaling of language models, do not consistently improve multimodal self-rationalization of tasks with multimodal inputs. We also observe that no model type works universally the best across tasks/datasets and finetuning data sizes. Our findings call for a backbone modelling approach that can be built on to advance text generation from images and text beyond image captioning.
Training Vision-Language Transformers from Captions Alone
May 19, 2022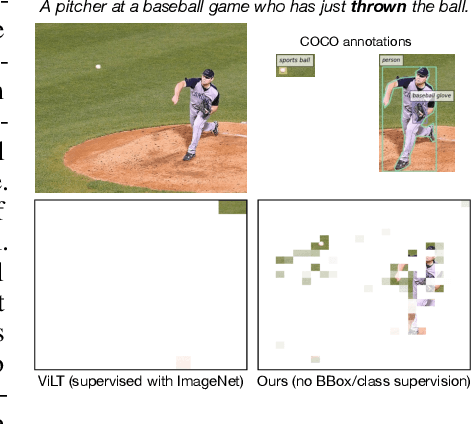
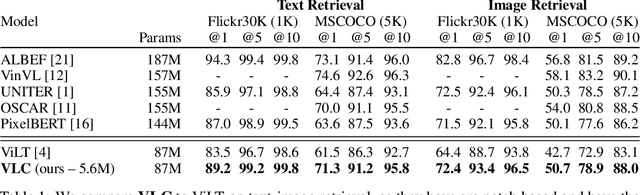
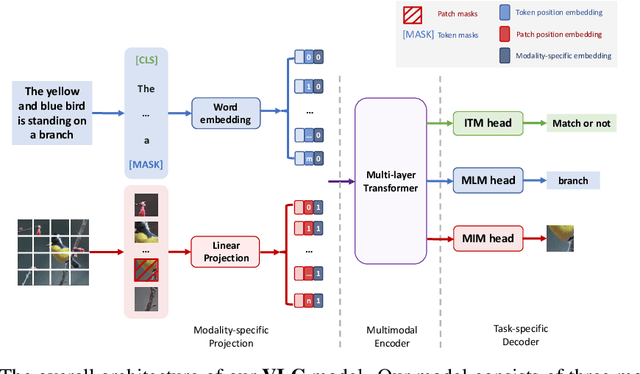
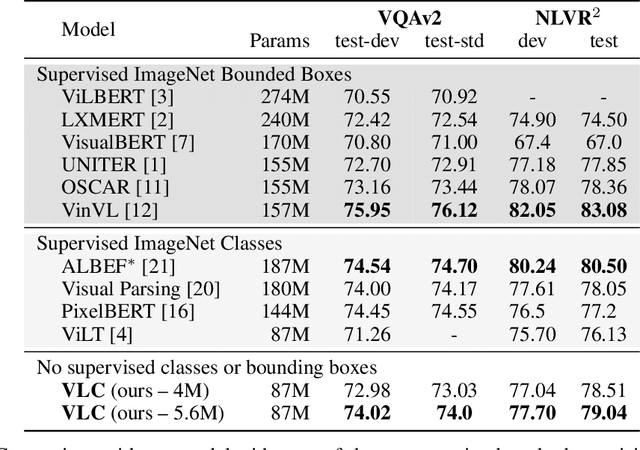
We show that Vision-Language Transformers can be learned without human labels (e.g. class labels, bounding boxes, etc). Existing work, whether explicitly utilizing bounding boxes or patches, assumes that the visual backbone must first be trained on ImageNet class prediction before being integrated into a multimodal linguistic pipeline. We show that this is not necessary and introduce a new model Vision-Language from Captions (VLC) built on top of Masked Auto-Encoders that does not require this supervision. In fact, in a head-to-head comparison between ViLT, the current state-of-the-art patch-based vision-language transformer which is pretrained with supervised object classification, and our model, VLC, we find that our approach 1. outperforms ViLT on standard benchmarks, 2. provides more interpretable and intuitive patch visualizations, and 3. is competitive with many larger models that utilize ROIs trained on annotated bounding-boxes.
HEAR 2021: Holistic Evaluation of Audio Representations
Mar 26, 2022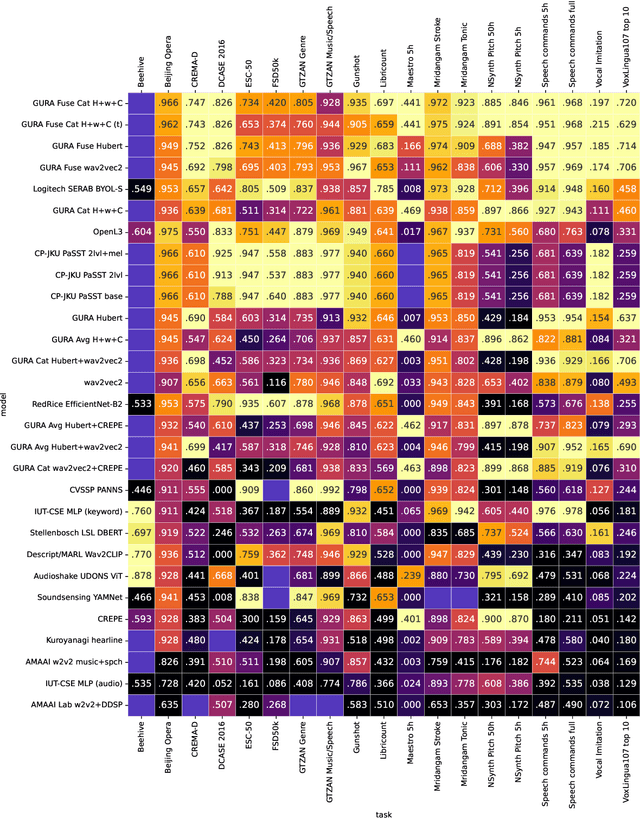
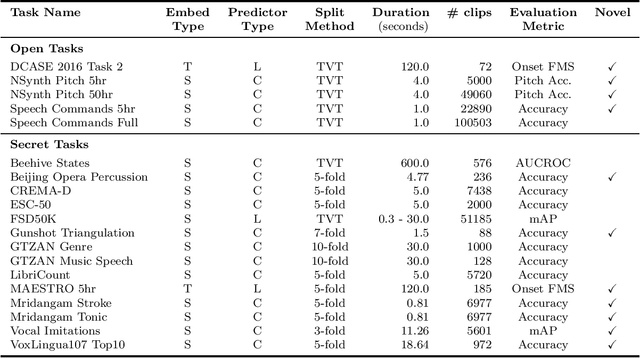
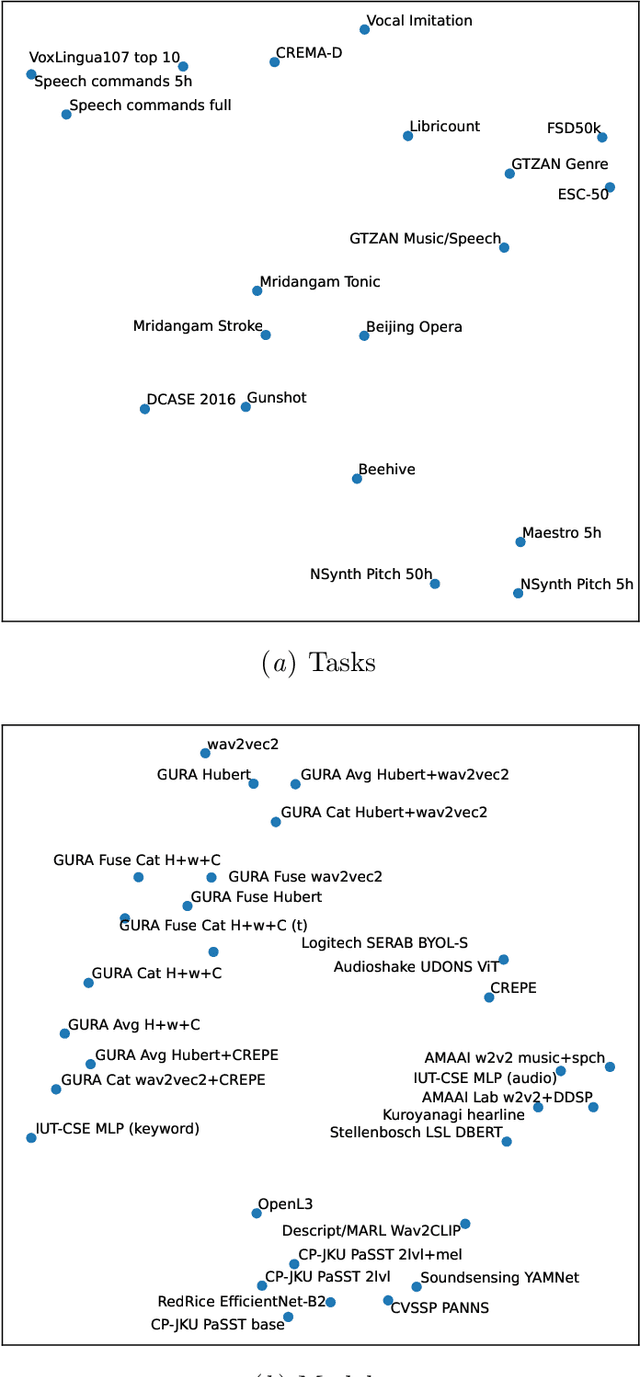
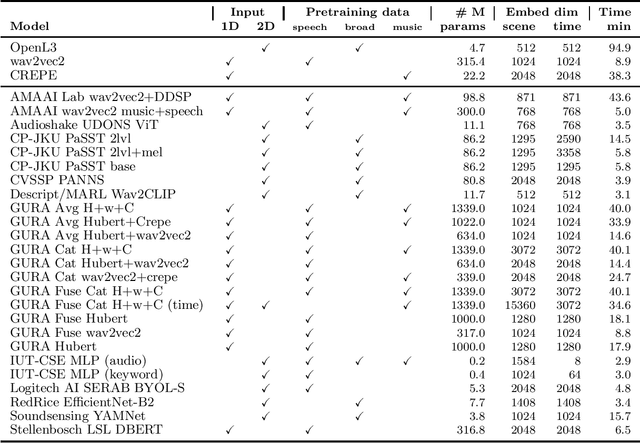
What audio embedding approach generalizes best to a wide range of downstream tasks across a variety of everyday domains without fine-tuning? The aim of the HEAR 2021 NeurIPS challenge is to develop a general-purpose audio representation that provides a strong basis for learning in a wide variety of tasks and scenarios. HEAR 2021 evaluates audio representations using a benchmark suite across a variety of domains, including speech, environmental sound, and music. In the spirit of shared exchange, each participant submitted an audio embedding model following a common API that is general-purpose, open-source, and freely available to use. Twenty-nine models by thirteen external teams were evaluated on nineteen diverse downstream tasks derived from sixteen datasets. Open evaluation code, submitted models and datasets are key contributions, enabling comprehensive and reproducible evaluation, as well as previously impossible longitudinal studies. It still remains an open question whether one single general-purpose audio representation can perform as holistically as the human ear.
KAT: A Knowledge Augmented Transformer for Vision-and-Language
Dec 16, 2021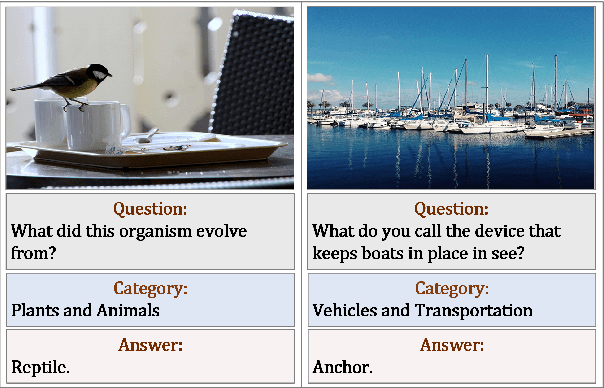
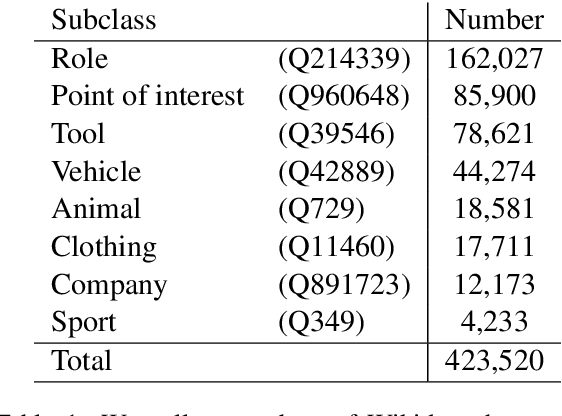
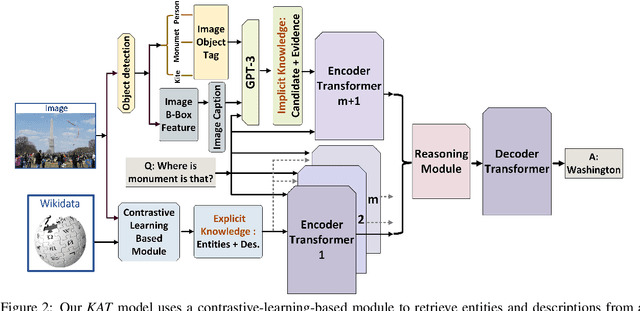
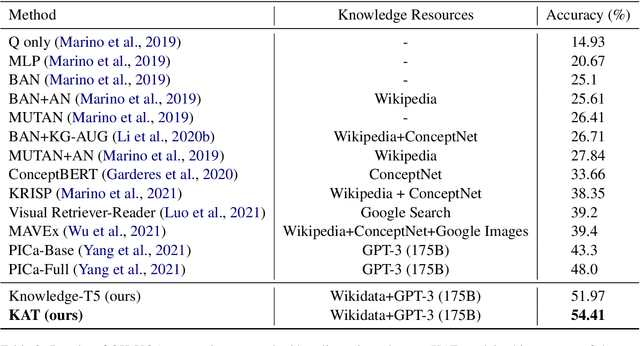
The primary focus of recent work with largescale transformers has been on optimizing the amount of information packed into the model's parameters. In this work, we ask a different question: Can multimodal transformers leverage explicit knowledge in their reasoning? Existing, primarily unimodal, methods have explored approaches under the paradigm of knowledge retrieval followed by answer prediction, but leave open questions about the quality and relevance of the retrieved knowledge used, and how the reasoning processes over implicit and explicit knowledge should be integrated. To address these challenges, we propose a novel model - Knowledge Augmented Transformer (KAT) - which achieves a strong state-of-the-art result (+6 points absolute) on the open-domain multimodal task of OK-VQA. Our approach integrates implicit and explicit knowledge in an end to end encoder-decoder architecture, while still jointly reasoning over both knowledge sources during answer generation. An additional benefit of explicit knowledge integration is seen in improved interpretability of model predictions in our analysis.