 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeveloping and evaluating a chatbot to support maternal health care
Mar 13, 2026The ability to provide trustworthy maternal health information using phone-based chatbots can have a significant impact, particularly in low-resource settings where users have low health literacy and limited access to care. However, deploying such systems is technically challenging: user queries are short, underspecified, and code-mixed across languages, answers require regional context-specific grounding, and partial or missing symptom context makes safe routing decisions difficult. We present a chatbot for maternal health in India developed through a partnership between academic researchers, a health tech company, a public health nonprofit, and a hospital. The system combines (1) stage-aware triage, routing high-risk queries to expert templates, (2) hybrid retrieval over curated maternal/newborn guidelines, and (3) evidence-conditioned generation from an LLM. Our core contribution is an evaluation workflow for high-stakes deployment under limited expert supervision. Targeting both component-level and end-to-end testing, we introduce: (i) a labeled triage benchmark (N=150) achieving 86.7% emergency recall, explicitly reporting the missed-emergency vs. over-escalation trade-off; (ii) a synthetic multi-evidence retrieval benchmark (N=100) with chunk-level evidence labels; (iii) LLM-as-judge comparison on real queries (N=781) using clinician-codesigned criteria; and (iv) expert validation. Our findings show that trustworthy medical assistants in multilingual, noisy settings require defense-in-depth design paired with multi-method evaluation, rather than any single model and evaluation method choice.
ANAVI: Audio Noise Awareness using Visuals of Indoor environments for NAVIgation
Oct 24, 2024



We propose Audio Noise Awareness using Visuals of Indoors for NAVIgation for quieter robot path planning. While humans are naturally aware of the noise they make and its impact on those around them, robots currently lack this awareness. A key challenge in achieving audio awareness for robots is estimating how loud will the robot's actions be at a listener's location? Since sound depends upon the geometry and material composition of rooms, we train the robot to passively perceive loudness using visual observations of indoor environments. To this end, we generate data on how loud an 'impulse' sounds at different listener locations in simulated homes, and train our Acoustic Noise Predictor (ANP). Next, we collect acoustic profiles corresponding to different actions for navigation. Unifying ANP with action acoustics, we demonstrate experiments with wheeled (Hello Robot Stretch) and legged (Unitree Go2) robots so that these robots adhere to the noise constraints of the environment. See code and data at https://anavi-corl24.github.io/
Towards Open-World Mobile Manipulation in Homes: Lessons from the Neurips 2023 HomeRobot Open Vocabulary Mobile Manipulation Challenge
Jul 09, 2024



In order to develop robots that can effectively serve as versatile and capable home assistants, it is crucial for them to reliably perceive and interact with a wide variety of objects across diverse environments. To this end, we proposed Open Vocabulary Mobile Manipulation as a key benchmark task for robotics: finding any object in a novel environment and placing it on any receptacle surface within that environment. We organized a NeurIPS 2023 competition featuring both simulation and real-world components to evaluate solutions to this task. Our baselines on the most challenging version of this task, using real perception in simulation, achieved only an 0.8% success rate; by the end of the competition, the best participants achieved an 10.8\% success rate, a 13x improvement. We observed that the most successful teams employed a variety of methods, yet two common threads emerged among the best solutions: enhancing error detection and recovery, and improving the integration of perception with decision-making processes. In this paper, we detail the results and methodologies used, both in simulation and real-world settings. We discuss the lessons learned and their implications for future research. Additionally, we compare performance in real and simulated environments, emphasizing the necessity for robust generalization to novel settings.
Vid2Robot: End-to-end Video-conditioned Policy Learning with Cross-Attention Transformers
Mar 19, 2024



While large-scale robotic systems typically rely on textual instructions for tasks, this work explores a different approach: can robots infer the task directly from observing humans? This shift necessitates the robot's ability to decode human intent and translate it into executable actions within its physical constraints and environment. We introduce Vid2Robot, a novel end-to-end video-based learning framework for robots. Given a video demonstration of a manipulation task and current visual observations, Vid2Robot directly produces robot actions. This is achieved through a unified representation model trained on a large dataset of human video and robot trajectory. The model leverages cross-attention mechanisms to fuse prompt video features to the robot's current state and generate appropriate actions that mimic the observed task. To further improve policy performance, we propose auxiliary contrastive losses that enhance the alignment between human and robot video representations. We evaluate Vid2Robot on real-world robots, demonstrating a 20% improvement in performance compared to other video-conditioned policies when using human demonstration videos. Additionally, our model exhibits emergent capabilities, such as successfully transferring observed motions from one object to another, and long-horizon composition, thus showcasing its potential for real-world applications. Project website: vid2robot.github.io
FlexCap: Generating Rich, Localized, and Flexible Captions in Images
Mar 18, 2024



We introduce a versatile $\textit{flexible-captioning}$ vision-language model (VLM) capable of generating region-specific descriptions of varying lengths. The model, FlexCap, is trained to produce length-conditioned captions for input bounding boxes, and this allows control over the information density of its output, with descriptions ranging from concise object labels to detailed captions. To achieve this we create large-scale training datasets of image region descriptions of varying length, starting from captioned images. This flexible-captioning capability has several valuable applications. First, FlexCap demonstrates superior performance in dense captioning tasks on the Visual Genome dataset. Second, a visual question answering (VQA) system can be built by employing FlexCap to generate localized descriptions as inputs to a large language model. The resulting system achieves state-of-the-art zero-shot performance on a number of VQA datasets. We also demonstrate a $\textit{localize-then-describe}$ approach with FlexCap can be better at open-ended object detection than a $\textit{describe-then-localize}$ approach with other VLMs. We highlight a novel characteristic of FlexCap, which is its ability to extract diverse visual information through prefix conditioning. Finally, we qualitatively demonstrate FlexCap's broad applicability in tasks such as image labeling, object attribute recognition, and visual dialog. Project webpage: https://flex-cap.github.io .
Toward General-Purpose Robots via Foundation Models: A Survey and Meta-Analysis
Dec 15, 2023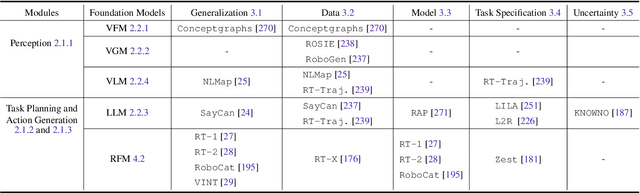
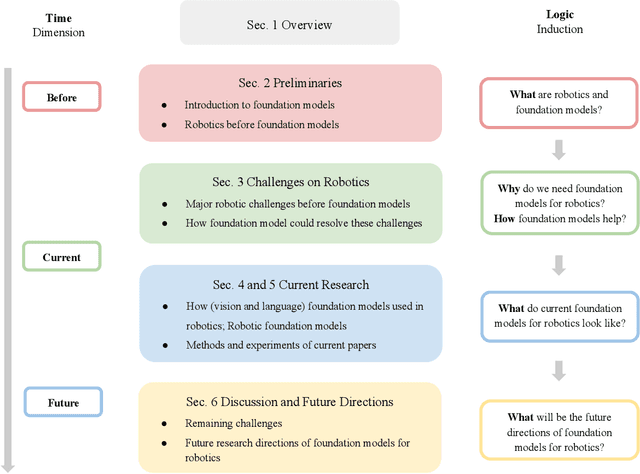
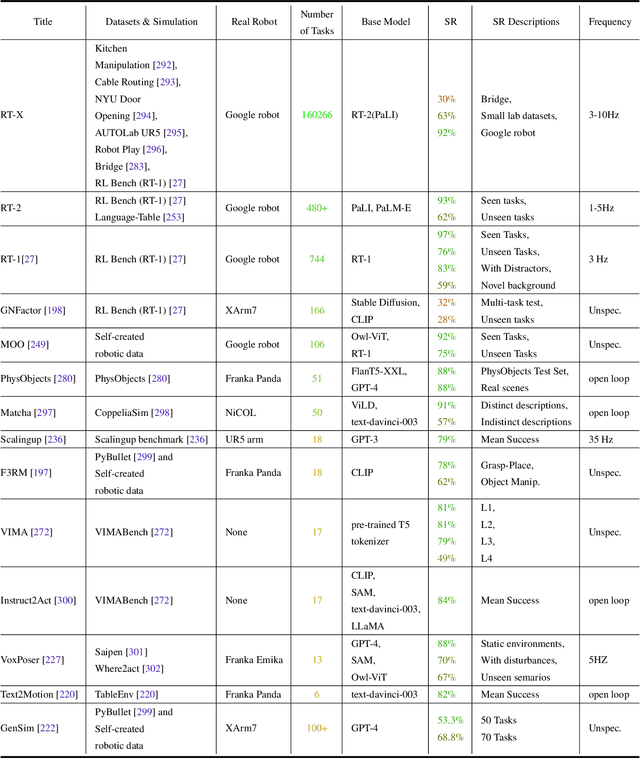
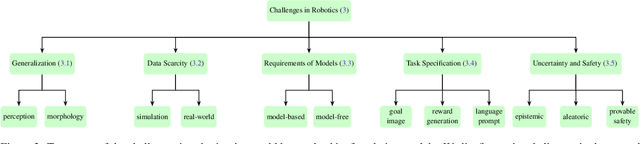
Building general-purpose robots that can operate seamlessly, in any environment, with any object, and utilizing various skills to complete diverse tasks has been a long-standing goal in Artificial Intelligence. Unfortunately, however, most existing robotic systems have been constrained - having been designed for specific tasks, trained on specific datasets, and deployed within specific environments. These systems usually require extensively-labeled data, rely on task-specific models, have numerous generalization issues when deployed in real-world scenarios, and struggle to remain robust to distribution shifts. Motivated by the impressive open-set performance and content generation capabilities of web-scale, large-capacity pre-trained models (i.e., foundation models) in research fields such as Natural Language Processing (NLP) and Computer Vision (CV), we devote this survey to exploring (i) how these existing foundation models from NLP and CV can be applied to the field of robotics, and also exploring (ii) what a robotics-specific foundation model would look like. We begin by providing an overview of what constitutes a conventional robotic system and the fundamental barriers to making it universally applicable. Next, we establish a taxonomy to discuss current work exploring ways to leverage existing foundation models for robotics and develop ones catered to robotics. Finally, we discuss key challenges and promising future directions in using foundation models for enabling general-purpose robotic systems. We encourage readers to view our living GitHub repository of resources, including papers reviewed in this survey as well as related projects and repositories for developing foundation models for robotics.
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Oct 17, 2023



Large, high-capacity models trained on diverse datasets have shown remarkable successes on efficiently tackling downstream applications. In domains from NLP to Computer Vision, this has led to a consolidation of pretrained models, with general pretrained backbones serving as a starting point for many applications. Can such a consolidation happen in robotics? Conventionally, robotic learning methods train a separate model for every application, every robot, and even every environment. Can we instead train generalist X-robot policy that can be adapted efficiently to new robots, tasks, and environments? In this paper, we provide datasets in standardized data formats and models to make it possible to explore this possibility in the context of robotic manipulation, alongside experimental results that provide an example of effective X-robot policies. We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms. More details can be found on the project website $\href{https://robotics-transformer-x.github.io}{\text{robotics-transformer-x.github.io}}$.
MAEA: Multimodal Attribution for Embodied AI
Jul 25, 2023Understanding multimodal perception for embodied AI is an open question because such inputs may contain highly complementary as well as redundant information for the task. A relevant direction for multimodal policies is understanding the global trends of each modality at the fusion layer. To this end, we disentangle the attributions for visual, language, and previous action inputs across different policies trained on the ALFRED dataset. Attribution analysis can be utilized to rank and group the failure scenarios, investigate modeling and dataset biases, and critically analyze multimodal EAI policies for robustness and user trust before deployment. We present MAEA, a framework to compute global attributions per modality of any differentiable policy. In addition, we show how attributions enable lower-level behavior analysis in EAI policies for language and visual attributions.
HomeRobot: Open-Vocabulary Mobile Manipulation
Jun 20, 2023



HomeRobot (noun): An affordable compliant robot that navigates homes and manipulates a wide range of objects in order to complete everyday tasks. Open-Vocabulary Mobile Manipulation (OVMM) is the problem of picking any object in any unseen environment, and placing it in a commanded location. This is a foundational challenge for robots to be useful assistants in human environments, because it involves tackling sub-problems from across robotics: perception, language understanding, navigation, and manipulation are all essential to OVMM. In addition, integration of the solutions to these sub-problems poses its own substantial challenges. To drive research in this area, we introduce the HomeRobot OVMM benchmark, where an agent navigates household environments to grasp novel objects and place them on target receptacles. HomeRobot has two components: a simulation component, which uses a large and diverse curated object set in new, high-quality multi-room home environments; and a real-world component, providing a software stack for the low-cost Hello Robot Stretch to encourage replication of real-world experiments across labs. We implement both reinforcement learning and heuristic (model-based) baselines and show evidence of sim-to-real transfer. Our baselines achieve a 20% success rate in the real world; our experiments identify ways future research work improve performance. See videos on our website: https://ovmm.github.io/.
Transformers are Adaptable Task Planners
Jul 06, 2022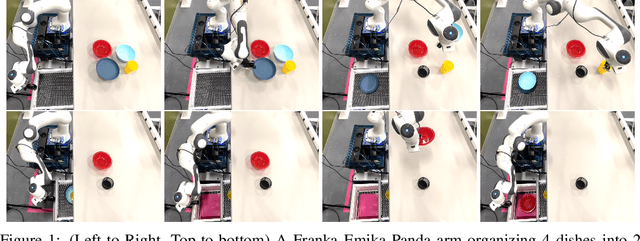
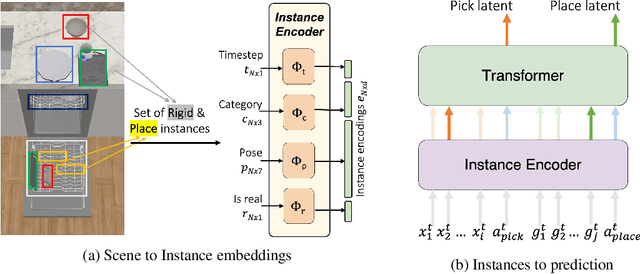
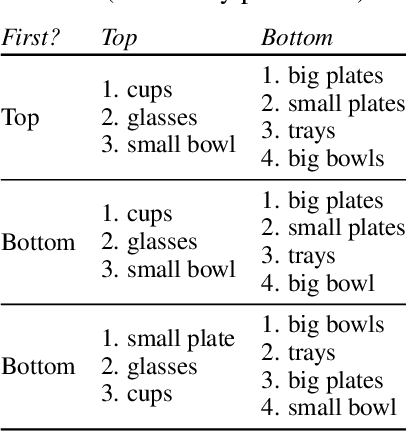
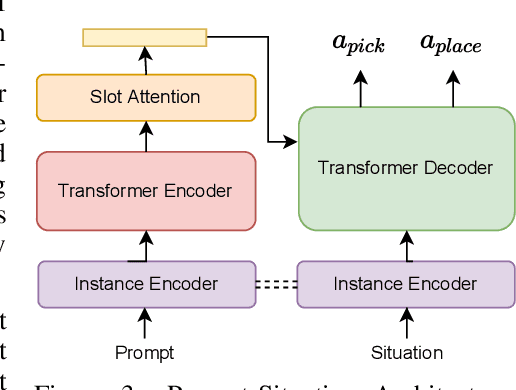
Every home is different, and every person likes things done in their particular way. Therefore, home robots of the future need to both reason about the sequential nature of day-to-day tasks and generalize to user's preferences. To this end, we propose a Transformer Task Planner(TTP) that learns high-level actions from demonstrations by leveraging object attribute-based representations. TTP can be pre-trained on multiple preferences and shows generalization to unseen preferences using a single demonstration as a prompt in a simulated dishwasher loading task. Further, we demonstrate real-world dish rearrangement using TTP with a Franka Panda robotic arm, prompted using a single human demonstration.