 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTo Err is Robotic: Rapid Value-Based Trial-and-Error during Deployment
Jun 22, 2024



When faced with a novel scenario, it can be hard to succeed on the first attempt. In these challenging situations, it is important to know how to retry quickly and meaningfully. Retrying behavior can emerge naturally in robots trained on diverse data, but such robot policies will typically only exhibit undirected retrying behavior and may not terminate a suboptimal approach before an unrecoverable mistake. We can improve these robot policies by instilling an explicit ability to try, evaluate, and retry a diverse range of strategies. We introduce Bellman-Guided Retrials, an algorithm that works on top of a base robot policy by monitoring the robot's progress, detecting when a change of plan is needed, and adapting the executed strategy until the robot succeeds. We start with a base policy trained on expert demonstrations of a variety of scenarios. Then, using the same expert demonstrations, we train a value function to estimate task completion. During test time, we use the value function to compare our expected rate of progress to our achieved rate of progress. If our current strategy fails to make progress at a reasonable rate, we recover the robot and sample a new strategy from the base policy while skewing it away from behaviors that have recently failed. We evaluate our method on simulated and real-world environments that contain a diverse suite of scenarios. We find that Bellman-Guided Retrials increases the average absolute success rates of base policies by more than 20% in simulation and 50% in real-world experiments, demonstrating a promising framework for instilling existing trained policies with explicit trial and error capabilities. For evaluation videos and other documentation, go to https://sites.google.com/view/to-err-robotic/home
DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset
Mar 19, 2024



The creation of large, diverse, high-quality robot manipulation datasets is an important stepping stone on the path toward more capable and robust robotic manipulation policies. However, creating such datasets is challenging: collecting robot manipulation data in diverse environments poses logistical and safety challenges and requires substantial investments in hardware and human labour. As a result, even the most general robot manipulation policies today are mostly trained on data collected in a small number of environments with limited scene and task diversity. In this work, we introduce DROID (Distributed Robot Interaction Dataset), a diverse robot manipulation dataset with 76k demonstration trajectories or 350 hours of interaction data, collected across 564 scenes and 84 tasks by 50 data collectors in North America, Asia, and Europe over the course of 12 months. We demonstrate that training with DROID leads to policies with higher performance and improved generalization ability. We open source the full dataset, policy learning code, and a detailed guide for reproducing our robot hardware setup.
RLVF: Learning from Verbal Feedback without Overgeneralization
Feb 16, 2024



The diversity of contexts in which large language models (LLMs) are deployed requires the ability to modify or customize default model behaviors to incorporate nuanced requirements and preferences. A convenient interface to specify such model adjustments is high-level verbal feedback, such as "Don't use emojis when drafting emails to my boss." However, while writing high-level feedback is far simpler than collecting annotations for reinforcement learning from human feedback (RLHF), we find that simply prompting a model with such feedback leads to overgeneralization of the feedback to contexts where it is not relevant. We study the problem of incorporating verbal feedback without such overgeneralization, inspiring a new method Contextualized Critiques with Constrained Preference Optimization (C3PO). C3PO uses a piece of high-level feedback to generate a small synthetic preference dataset specifying how the feedback should (and should not) be applied. It then fine-tunes the model in accordance with the synthetic preference data while minimizing the divergence from the original model for prompts where the feedback does not apply. Our experimental results indicate that our approach effectively applies verbal feedback to relevant scenarios while preserving existing behaviors for other contexts. For both human- and GPT-4-generated high-level feedback, C3PO effectively adheres to the given feedback comparably to in-context baselines while reducing overgeneralization by 30%.
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Oct 17, 2023



Large, high-capacity models trained on diverse datasets have shown remarkable successes on efficiently tackling downstream applications. In domains from NLP to Computer Vision, this has led to a consolidation of pretrained models, with general pretrained backbones serving as a starting point for many applications. Can such a consolidation happen in robotics? Conventionally, robotic learning methods train a separate model for every application, every robot, and even every environment. Can we instead train generalist X-robot policy that can be adapted efficiently to new robots, tasks, and environments? In this paper, we provide datasets in standardized data formats and models to make it possible to explore this possibility in the context of robotic manipulation, alongside experimental results that provide an example of effective X-robot policies. We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms. More details can be found on the project website $\href{https://robotics-transformer-x.github.io}{\text{robotics-transformer-x.github.io}}$.
DetectGPT: Zero-Shot Machine-Generated Text Detection using Probability Curvature
Jan 26, 2023The fluency and factual knowledge of large language models (LLMs) heightens the need for corresponding systems to detect whether a piece of text is machine-written. For example, students may use LLMs to complete written assignments, leaving instructors unable to accurately assess student learning. In this paper, we first demonstrate that text sampled from an LLM tends to occupy negative curvature regions of the model's log probability function. Leveraging this observation, we then define a new curvature-based criterion for judging if a passage is generated from a given LLM. This approach, which we call DetectGPT, does not require training a separate classifier, collecting a dataset of real or generated passages, or explicitly watermarking generated text. It uses only log probabilities computed by the model of interest and random perturbations of the passage from another generic pre-trained language model (e.g, T5). We find DetectGPT is more discriminative than existing zero-shot methods for model sample detection, notably improving detection of fake news articles generated by 20B parameter GPT-NeoX from 0.81 AUROC for the strongest zero-shot baseline to 0.95 AUROC for DetectGPT. See https://ericmitchell.ai/detectgpt for code, data, and other project information.
Mismatched No More: Joint Model-Policy Optimization for Model-Based RL
Oct 06, 2021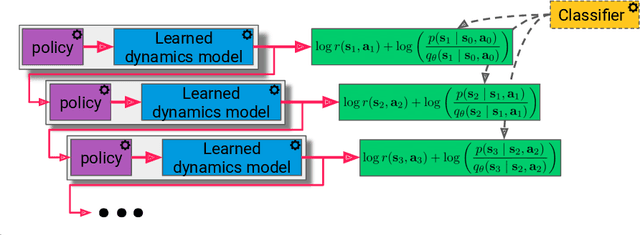
Many model-based reinforcement learning (RL) methods follow a similar template: fit a model to previously observed data, and then use data from that model for RL or planning. However, models that achieve better training performance (e.g., lower MSE) are not necessarily better for control: an RL agent may seek out the small fraction of states where an accurate model makes mistakes, or it might act in ways that do not expose the errors of an inaccurate model. As noted in prior work, there is an objective mismatch: models are useful if they yield good policies, but they are trained to maximize their accuracy, rather than the performance of the policies that result from them. In this work, we propose a single objective for jointly training the model and the policy, such that updates to either component increases a lower bound on expected return. This joint optimization mends the objective mismatch in prior work. Our objective is a global lower bound on expected return, and this bound becomes tight under certain assumptions. The resulting algorithm (MnM) is conceptually similar to a GAN: a classifier distinguishes between real and fake transitions, the model is updated to produce transitions that look realistic, and the policy is updated to avoid states where the model predictions are unrealistic.
What Can I Do Here? Learning New Skills by Imagining Visual Affordances
Jun 13, 2021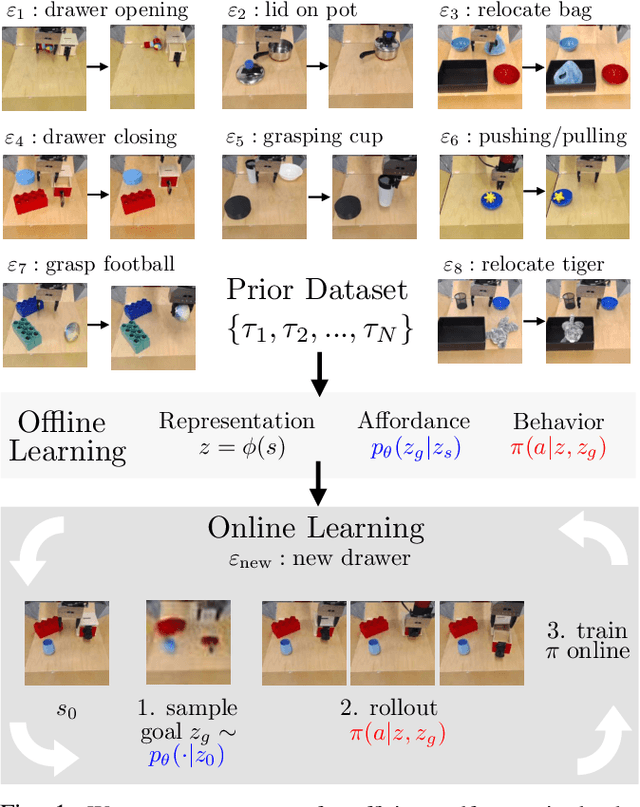
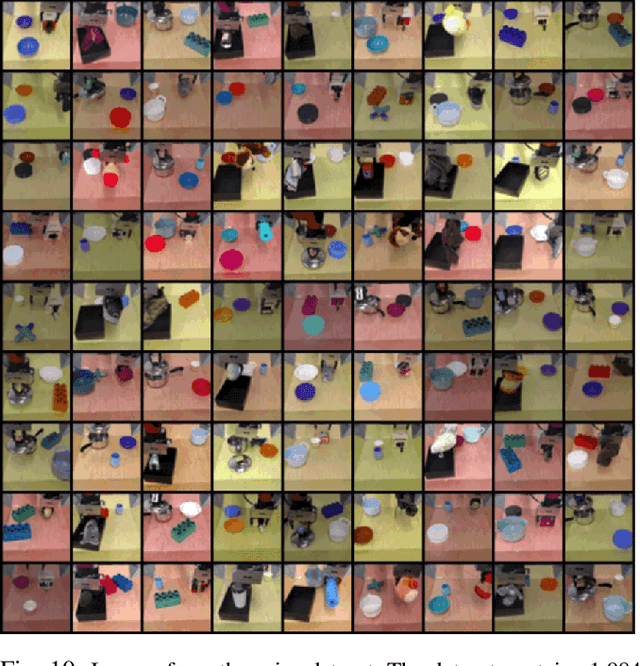
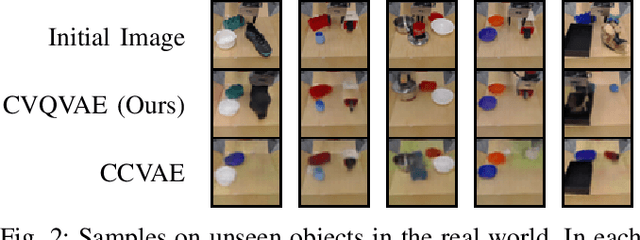
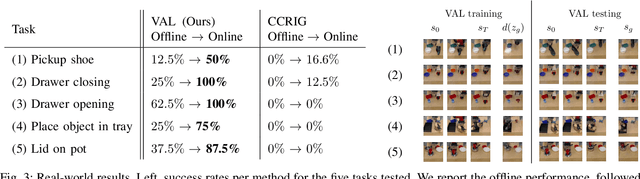
A generalist robot equipped with learned skills must be able to perform many tasks in many different environments. However, zero-shot generalization to new settings is not always possible. When the robot encounters a new environment or object, it may need to finetune some of its previously learned skills to accommodate this change. But crucially, previously learned behaviors and models should still be suitable to accelerate this relearning. In this paper, we aim to study how generative models of possible outcomes can allow a robot to learn visual representations of affordances, so that the robot can sample potentially possible outcomes in new situations, and then further train its policy to achieve those outcomes. In effect, prior data is used to learn what kinds of outcomes may be possible, such that when the robot encounters an unfamiliar setting, it can sample potential outcomes from its model, attempt to reach them, and thereby update both its skills and its outcome model. This approach, visuomotor affordance learning (VAL), can be used to train goal-conditioned policies that operate on raw image inputs, and can rapidly learn to manipulate new objects via our proposed affordance-directed exploration scheme. We show that VAL can utilize prior data to solve real-world tasks such drawer opening, grasping, and placing objects in new scenes with only five minutes of online experience in the new scene.
DisCo RL: Distribution-Conditioned Reinforcement Learning for General-Purpose Policies
Apr 23, 2021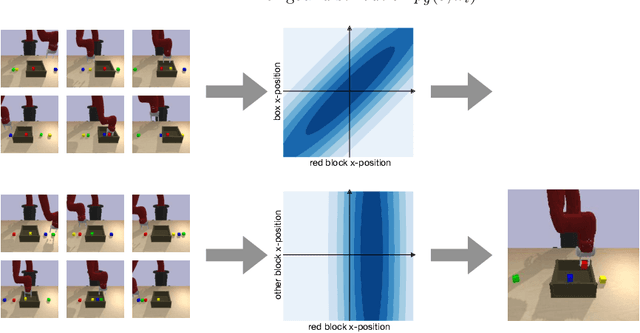
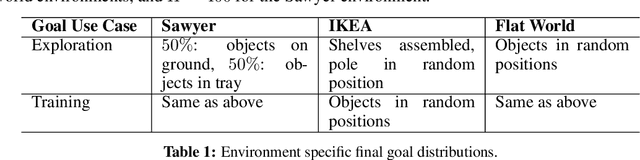
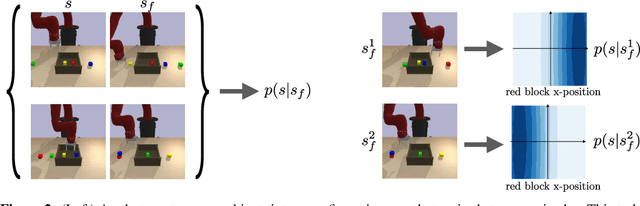
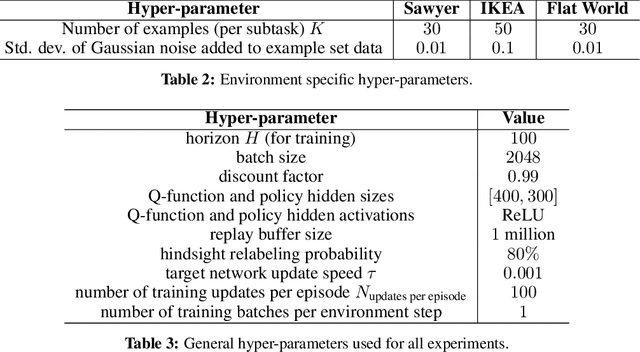
Can we use reinforcement learning to learn general-purpose policies that can perform a wide range of different tasks, resulting in flexible and reusable skills? Contextual policies provide this capability in principle, but the representation of the context determines the degree of generalization and expressivity. Categorical contexts preclude generalization to entirely new tasks. Goal-conditioned policies may enable some generalization, but cannot capture all tasks that might be desired. In this paper, we propose goal distributions as a general and broadly applicable task representation suitable for contextual policies. Goal distributions are general in the sense that they can represent any state-based reward function when equipped with an appropriate distribution class, while the particular choice of distribution class allows us to trade off expressivity and learnability. We develop an off-policy algorithm called distribution-conditioned reinforcement learning (DisCo RL) to efficiently learn these policies. We evaluate DisCo RL on a variety of robot manipulation tasks and find that it significantly outperforms prior methods on tasks that require generalization to new goal distributions.
Contextual Imagined Goals for Self-Supervised Robotic Learning
Oct 23, 2019
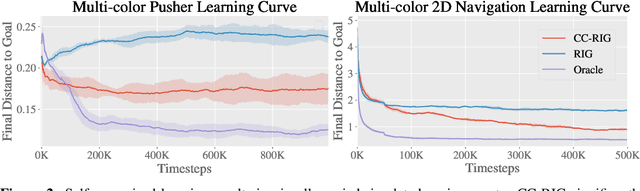
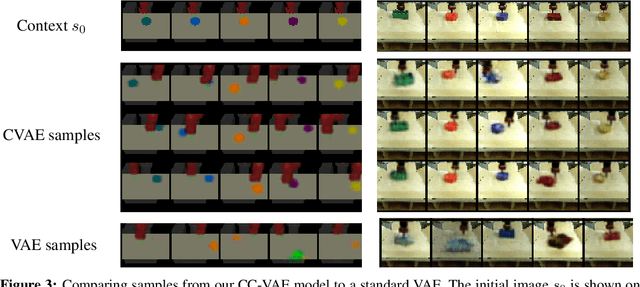
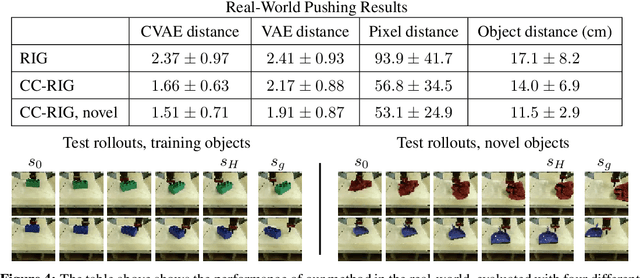
While reinforcement learning provides an appealing formalism for learning individual skills, a general-purpose robotic system must be able to master an extensive repertoire of behaviors. Instead of learning a large collection of skills individually, can we instead enable a robot to propose and practice its own behaviors automatically, learning about the affordances and behaviors that it can perform in its environment, such that it can then repurpose this knowledge once a new task is commanded by the user? In this paper, we study this question in the context of self-supervised goal-conditioned reinforcement learning. A central challenge in this learning regime is the problem of goal setting: in order to practice useful skills, the robot must be able to autonomously set goals that are feasible but diverse. When the robot's environment and available objects vary, as they do in most open-world settings, the robot must propose to itself only those goals that it can accomplish in its present setting with the objects that are at hand. Previous work only studies self-supervised goal-conditioned RL in a single-environment setting, where goal proposals come from the robot's past experience or a generative model are sufficient. In more diverse settings, this frequently leads to impossible goals and, as we show experimentally, prevents effective learning. We propose a conditional goal-setting model that aims to propose goals that are feasible from the robot's current state. We demonstrate that this enables self-supervised goal-conditioned off-policy learning with raw image observations in the real world, enabling a robot to manipulate a variety of objects and generalize to new objects that were not seen during training.