 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDemonstration-Efficient Guided Policy Search via Imitation of Robust Tube MPC
Sep 23, 2021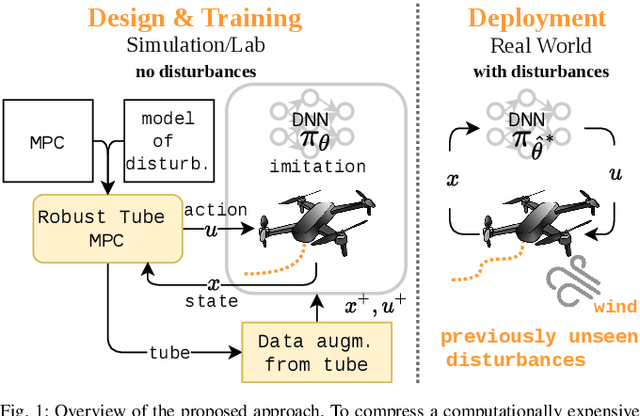
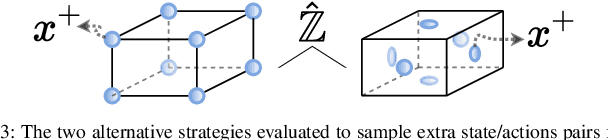
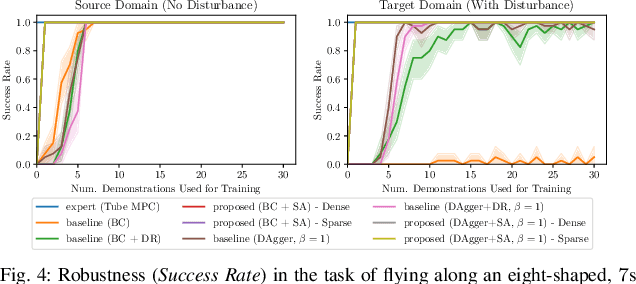
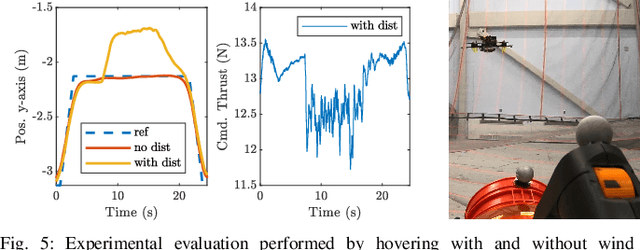
We propose a demonstration-efficient strategy to compress a computationally expensive Model Predictive Controller (MPC) into a more computationally efficient representation based on a deep neural network and Imitation Learning (IL). By generating a Robust Tube variant (RTMPC) of the MPC and leveraging properties from the tube, we introduce a data augmentation method that enables high demonstration-efficiency, being capable to compensate the distribution shifts typically encountered in IL. Our approach opens the possibility of zero-shot transfer from a single demonstration collected in a nominal domain, such as a simulation or a robot in a lab/controlled environment, to a domain with bounded model errors/perturbations. Numerical and experimental evaluations performed on a trajectory tracking MPC for a quadrotor show that our method outperforms strategies commonly employed in IL, such as DAgger and Domain Randomization, in terms of demonstration-efficiency and robustness to perturbations unseen during training.
Model-free online motion adaptation for energy efficient flights of multicopters
Aug 09, 2021



Limited flight distance and time is a common problem for multicopters. We propose a method for finding the optimal speed and heading of multicopters while flying a given path to achieve the longest flight distance or time. Since flight speed and heading are often free variables in multicopter path planning, they can be changed without changing the mission. The proposed method is based on a novel multivariable extremum seeking controller with adaptive step size. It (a) does not require any power consumption model of the vehicle, (b) can be executed online, (c) is computationally efficient and runs on low-cost embedded computers in real-time, and (d) converges faster than the standard extremum seeking controller with constant step size. We prove the stability of this proposed extremum seeking controller, and conduct outdoor experiments to validate the effectiveness of this method with different initial conditions, with and without payload. This method could be especially useful for applications such as package delivery, where the weight, size and shape of the payload vary between deliveries and the power consumption of the vehicle is hard to model. Experiments show that compared to flying at the maximum speed with a bad heading angle, flying at the optimal range speed and heading reduces the energy consumed per distance by 24.9% without payload and 33.5% with a box payload. In addition, compared to hovering, flying at the optimal endurance speed and heading reduces the the power consumption by 7.0% without payload and 12.6% with a box payload.
Airflow-Inertial Odometry for Resilient State Estimation on Multirotors
May 27, 2021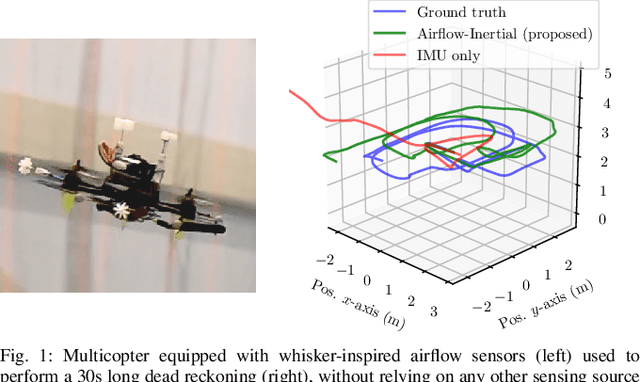
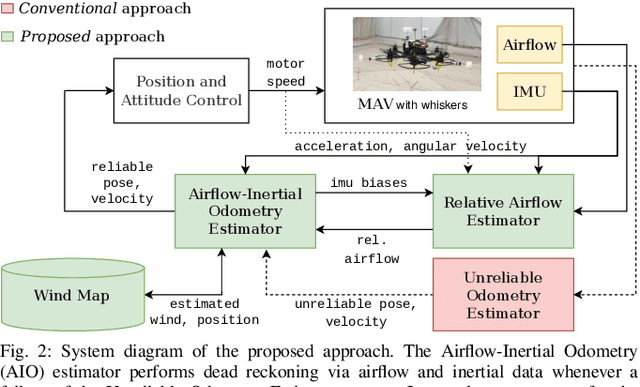
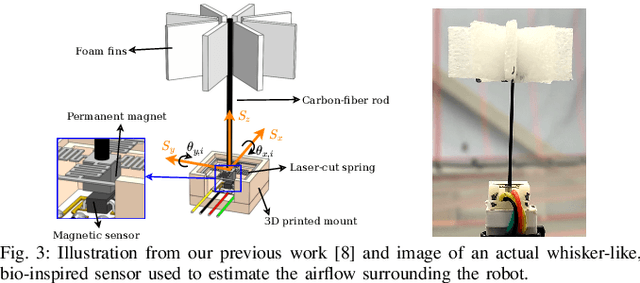
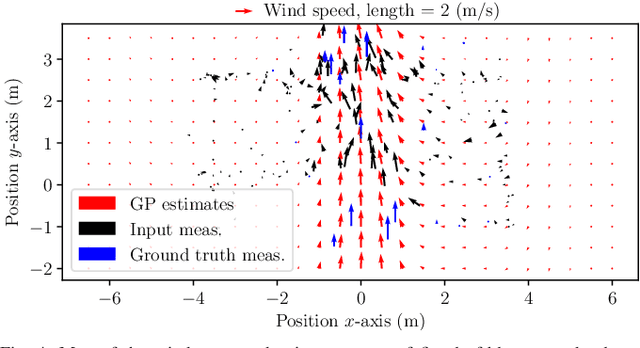
We present a dead reckoning strategy for increased resilience to position estimation failures on multirotors, using only data from a low-cost IMU and novel, bio-inspired airflow sensors. The goal is challenging, since low-cost IMUs are subject to large noise and drift, while 3D airflow sensing is made difficult by the interference caused by the propellers and by the wind. Our approach relies on a deep-learning strategy to interpret the measurements of the bio-inspired sensors, a map of the wind speed to compensate for position-dependent wind, and a filter to fuse the information and generate a pose and velocity estimate. Our results show that the approach reduces the drift with respect to IMU-only dead reckoning by up to an order of magnitude over 30 seconds after a position sensor failure in non-windy environments, and it can compensate for the challenging effects of turbulent, and spatially varying wind.
NeBula: Quest for Robotic Autonomy in Challenging Environments; TEAM CoSTAR at the DARPA Subterranean Challenge
Mar 28, 2021



This paper presents and discusses algorithms, hardware, and software architecture developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), competing in the DARPA Subterranean Challenge. Specifically, it presents the techniques utilized within the Tunnel (2019) and Urban (2020) competitions, where CoSTAR achieved 2nd and 1st place, respectively. We also discuss CoSTAR's demonstrations in Martian-analog surface and subsurface (lava tubes) exploration. The paper introduces our autonomy solution, referred to as NeBula (Networked Belief-aware Perceptual Autonomy). NeBula is an uncertainty-aware framework that aims at enabling resilient and modular autonomy solutions by performing reasoning and decision making in the belief space (space of probability distributions over the robot and world states). We discuss various components of the NeBula framework, including: (i) geometric and semantic environment mapping; (ii) a multi-modal positioning system; (iii) traversability analysis and local planning; (iv) global motion planning and exploration behavior; (i) risk-aware mission planning; (vi) networking and decentralized reasoning; and (vii) learning-enabled adaptation. We discuss the performance of NeBula on several robot types (e.g. wheeled, legged, flying), in various environments. We discuss the specific results and lessons learned from fielding this solution in the challenging courses of the DARPA Subterranean Challenge competition.
LION: Lidar-Inertial Observability-Aware Navigator for Vision-Denied Environments
Feb 05, 2021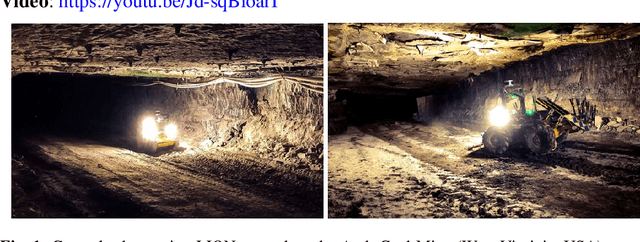
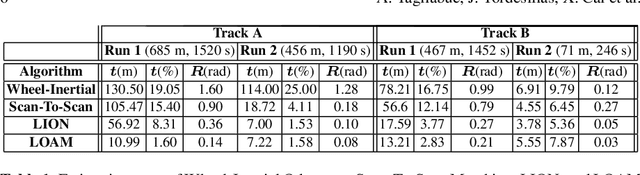
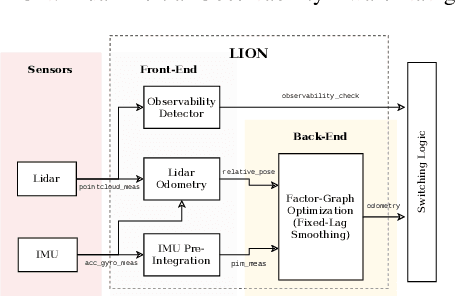
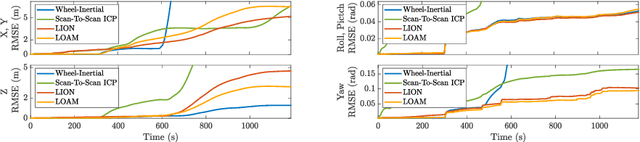
State estimation for robots navigating in GPS-denied and perceptually-degraded environments, such as underground tunnels, mines and planetary subsurface voids, remains challenging in robotics. Towards this goal, we present LION (Lidar-Inertial Observability-Aware Navigator), which is part of the state estimation framework developed by the team CoSTAR for the DARPA Subterranean Challenge, where the team achieved second and first places in the Tunnel and Urban circuits in August 2019 and February 2020, respectively. LION provides high-rate odometry estimates by fusing high-frequency inertial data from an IMU and low-rate relative pose estimates from a lidar via a fixed-lag sliding window smoother. LION does not require knowledge of relative positioning between lidar and IMU, as the extrinsic calibration is estimated online. In addition, LION is able to self-assess its performance using an observability metric that evaluates whether the pose estimate is geometrically ill-constrained. Odometry and confidence estimates are used by HeRO, a supervisory algorithm that provides robust estimates by switching between different odometry sources. In this paper we benchmark the performance of LION in perceptually-degraded subterranean environments, demonstrating its high technology readiness level for deployment in the field.
The Shapeshifter: a Morphing, Multi-Agent,Multi-Modal Robotic Platform for the Exploration of Titan
Mar 16, 2020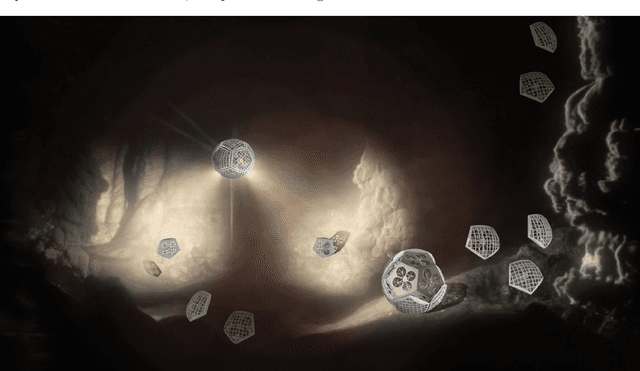
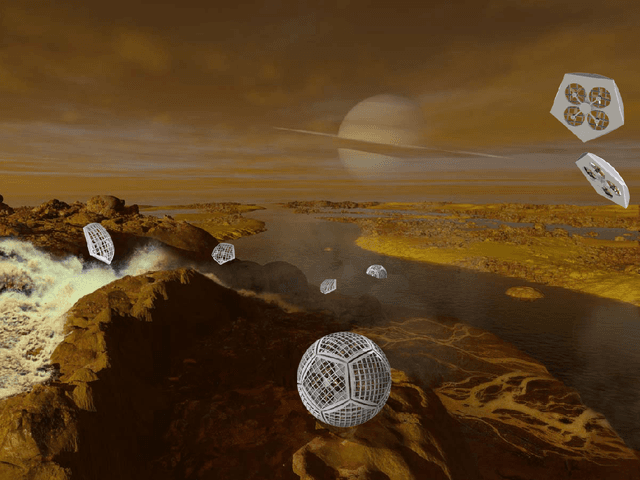
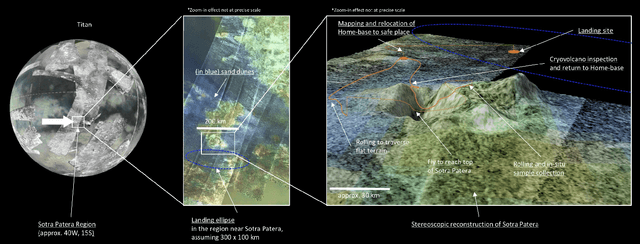
In this report for the Nasa NIAC Phase I study, we present a mission architecture and a robotic platform, the Shapeshifter, that allow multi-domain and redundant mobility on Saturn's moon Titan, and potentially other bodies with atmospheres. The Shapeshifter is a collection of simple and affordable robotic units, called Cobots, comparable to personal palm-size quadcopters. By attaching and detaching with each other, multiple Cobots can shape-shift into novel structures, capable of (a) rolling on the surface, to increase the traverse range, (b) flying in a flight array formation, and (c) swimming on or under liquid. A ground station complements the robotic platform, hosting science instrumentation and providing power to recharge the batteries of the Cobots. Our Phase I study had the objective of providing an initial assessment of the feasibility of the proposed robotic platform architecture, and in particular (a) to characterize the expected science return of a mission to the Sotra-Patera region on Titan; (b) to verify the mechanical and algorithmic feasibility of building a multi-agent platform capable of flying, docking, rolling and un-docking; (c) to evaluate the increased range and efficiency of rolling on Titan w.r.t to flying; (d) to define a case-study of a mission for the exploration of the cryovolcano Sotra-Patera on Titan, whose expected variety of geological features challenges conventional mobility platforms.
Touch the Wind: Simultaneous Airflow, Drag and Interaction Sensing on a Multirotor
Mar 04, 2020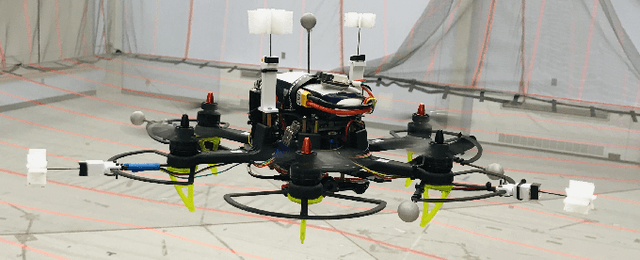
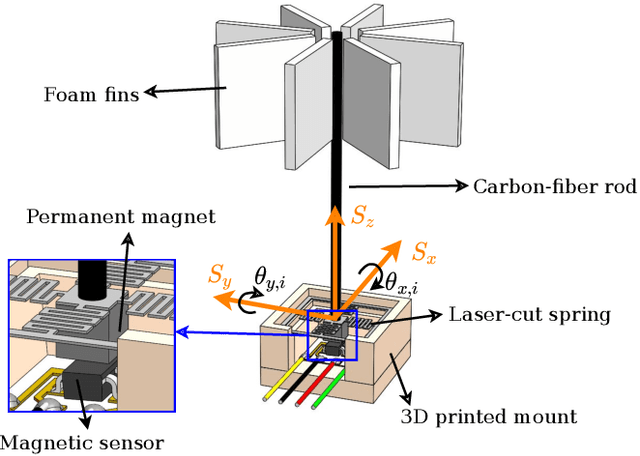
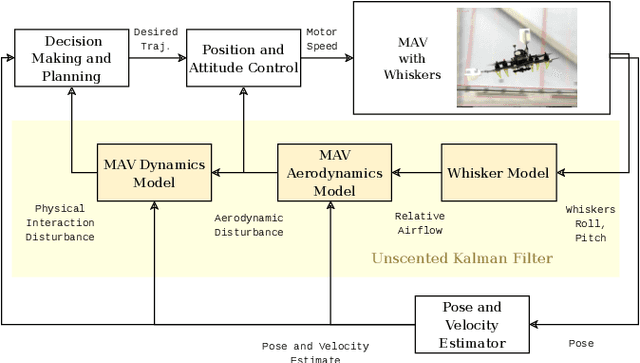
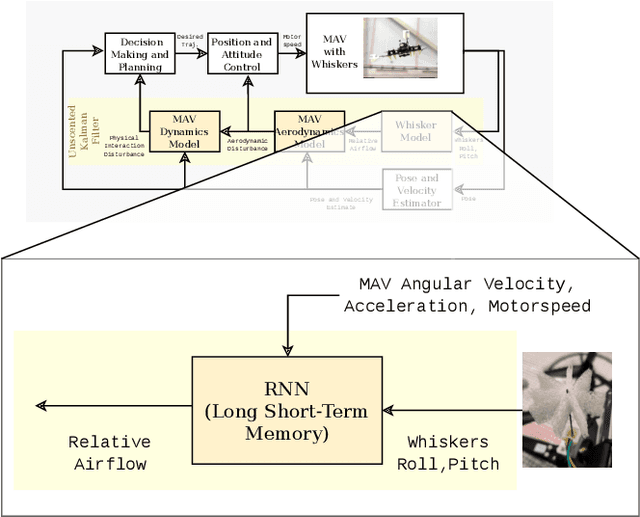
Disturbance estimation for Micro Aerial Vehicles (MAVs) is crucial for robustness and safety. In this paper, we use novel, bio-inspired airflow sensors to measure the airflow acting on a MAV, and we fuse this information in an Unscented Kalman Filter (UKF) to simultaneously estimate the three-dimensional wind vector, the drag force, and other interaction forces (e.g. due to collisions, interaction with a human) acting on the robot. To this end, we present and compare a fully model-based and a deep learning-based strategy. The model-based approach considers the MAV and airflow sensor dynamics and its interaction with the wind, while the deep learning-based strategy uses a Long Short-Term Memory (LSTM) neural network to obtain an estimate of the relative airflow, which is then fused in the proposed filter. We validate our methods in hardware experiments, showing that we can accurately estimate relative airflow of up to 4 m/s, and we can differentiate drag and interaction force.
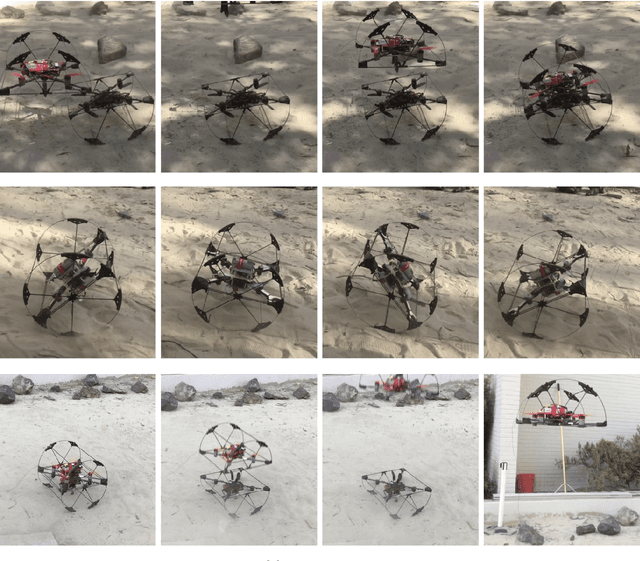
Shapeshifter: A Multi-Agent, Multi-Modal Robotic Platform for Exploration of Titan
Feb 03, 2020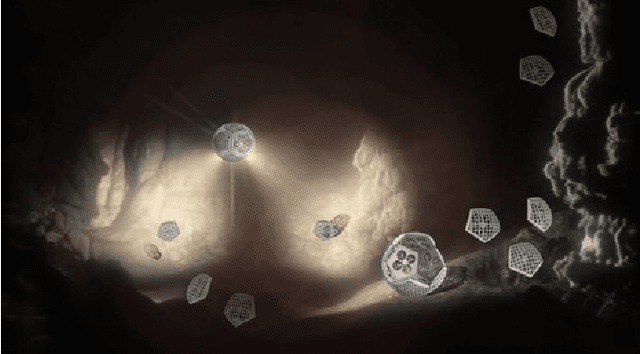
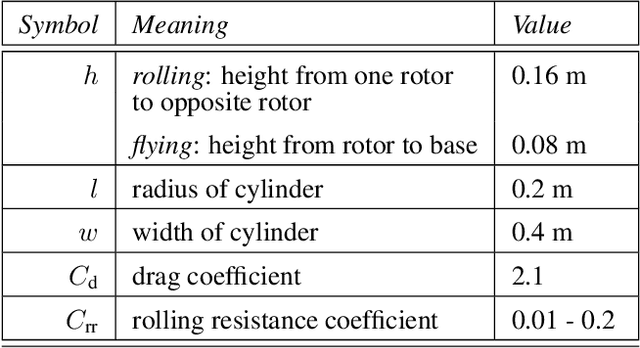
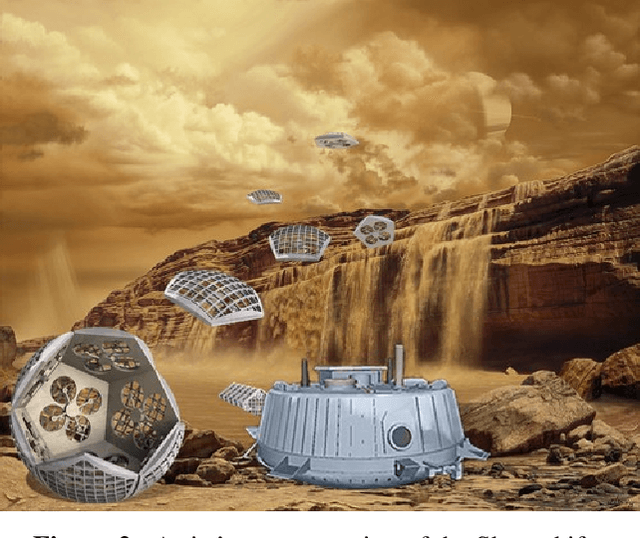
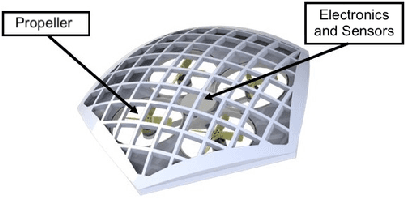
In this paper we present a mission architecture and a robotic platform, the Shapeshifter, that allow multi-domain and redundant mobility on Saturn's moon Titan, and potentially other bodies with atmospheres. The Shapeshifter is a collection of simple and affordable robotic units, called Cobots, comparable to personal palm-size quadcopters. By attaching and detaching with each other, multiple Cobots can shape-shift into novel structures, capable of (a) rolling on the surface, to increase the traverse range, (b) flying in a flight array formation, and (c) swimming on or under liquid. A ground station complements the robotic platform, hosting science instrumentation and providing power to recharge the batteries of the Cobots. In the first part of this paper we experimentally show the flying, docking and rolling capabilities of a Shapeshifter constituted by two Cobots, presenting ad-hoc control algorithms. We additionally evaluate the energy-efficiency of the rolling-based mobility strategy by deriving an analytic model of the power consumption and by integrating it in a high-fidelity simulation environment. In the second part we tailor our mission architecture to the exploration of Titan. We show that the properties of the Shapeshifter allow the exploration of the possible cryovolcano Sotra Patera, Titan's Mare and canyons.
Robust Collaborative Object Transportation Using Multiple MAVs
Nov 23, 2017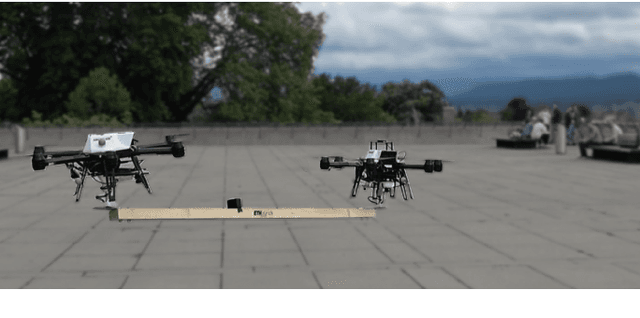

Collaborative object transportation using multiple Micro Aerial Vehicles (MAVs) with limited communication is a challenging problem. In this paper we address the problem of multiple MAVs mechanically coupled to a bulky object for transportation purposes without explicit communication between agents. The apparent physical properties of each agent are reshaped to achieve robustly stable transportation. Parametric uncertainties and unmodeled dynamics of each agent are quantified and techniques from robust control theory are employed to choose the physical parameters of each agent to guarantee stability. Extensive simulation analysis and experimental results show that the proposed method guarantees stability in worst case scenarios.
Collaborative Object Transportation Using MAVs via Passive Force Control
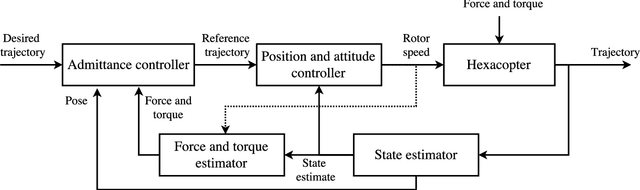
Dec 15, 2016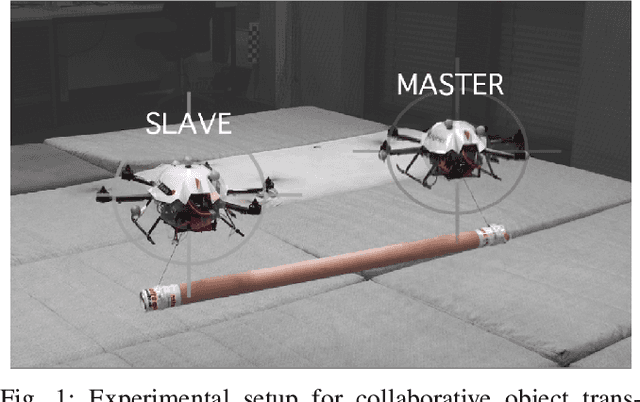
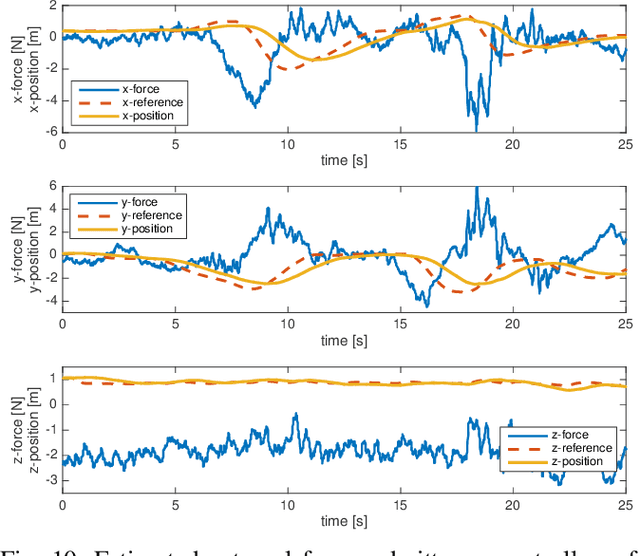
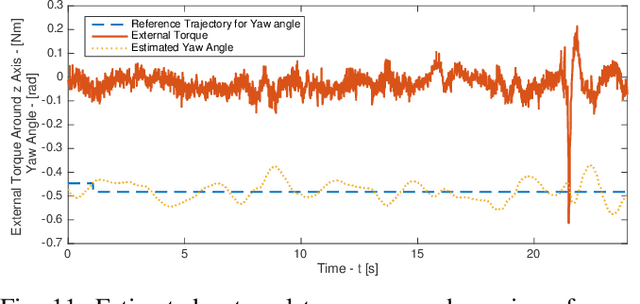
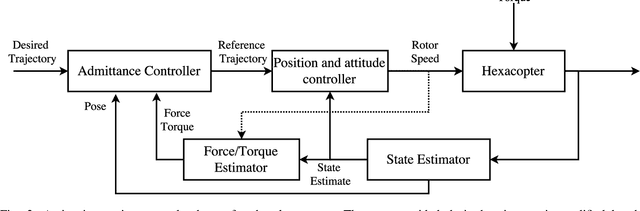
This paper shows a strategy based on passive force control for collaborative object transportation using Micro Aerial Vehicles (MAVs), focusing on the transportation of a bulky object by two hexacopters. The goal is to develop a robust approach which does not rely on: (a) communication links between the MAVs, (b) the knowledge of the payload shape and (c) the position of grasping point. The proposed approach is based on the master-slave paradigm, in which the slave agent guarantees compliance to the external force applied by the master to the payload via an admittance controller. The external force acting on the slave is estimated using a non-linear estimator based on the Unscented Kalman Filter (UKF) from the information provided by a visual inertial navigation system. Experimental results demonstrate the performance of the force estimator and show the collaborative transportation of a 1.2 m long object.