 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIsaac Lab: A GPU-Accelerated Simulation Framework for Multi-Modal Robot Learning
Nov 06, 2025



We present Isaac Lab, the natural successor to Isaac Gym, which extends the paradigm of GPU-native robotics simulation into the era of large-scale multi-modal learning. Isaac Lab combines high-fidelity GPU parallel physics, photorealistic rendering, and a modular, composable architecture for designing environments and training robot policies. Beyond physics and rendering, the framework integrates actuator models, multi-frequency sensor simulation, data collection pipelines, and domain randomization tools, unifying best practices for reinforcement and imitation learning at scale within a single extensible platform. We highlight its application to a diverse set of challenges, including whole-body control, cross-embodiment mobility, contact-rich and dexterous manipulation, and the integration of human demonstrations for skill acquisition. Finally, we discuss upcoming integration with the differentiable, GPU-accelerated Newton physics engine, which promises new opportunities for scalable, data-efficient, and gradient-based approaches to robot learning. We believe Isaac Lab's combination of advanced simulation capabilities, rich sensing, and data-center scale execution will help unlock the next generation of breakthroughs in robotics research.
The Reality Gap in Robotics: Challenges, Solutions, and Best Practices
Oct 23, 2025Machine learning has facilitated significant advancements across various robotics domains, including navigation, locomotion, and manipulation. Many such achievements have been driven by the extensive use of simulation as a critical tool for training and testing robotic systems prior to their deployment in real-world environments. However, simulations consist of abstractions and approximations that inevitably introduce discrepancies between simulated and real environments, known as the reality gap. These discrepancies significantly hinder the successful transfer of systems from simulation to the real world. Closing this gap remains one of the most pressing challenges in robotics. Recent advances in sim-to-real transfer have demonstrated promising results across various platforms, including locomotion, navigation, and manipulation. By leveraging techniques such as domain randomization, real-to-sim transfer, state and action abstractions, and sim-real co-training, many works have overcome the reality gap. However, challenges persist, and a deeper understanding of the reality gap's root causes and solutions is necessary. In this survey, we present a comprehensive overview of the sim-to-real landscape, highlighting the causes, solutions, and evaluation metrics for the reality gap and sim-to-real transfer.
Adaptive Horizon Actor-Critic for Policy Learning in Contact-Rich Differentiable Simulation
May 28, 2024



Model-Free Reinforcement Learning~(MFRL), leveraging the policy gradient theorem, has demonstrated considerable success in continuous control tasks. However, these approaches are plagued by high gradient variance due to zeroth-order gradient estimation, resulting in suboptimal policies. Conversely, First-Order Model-Based Reinforcement Learning~(FO-MBRL) methods, employing differentiable simulation, provide gradients with reduced variance but are susceptible to sampling error in scenarios involving stiff dynamics, such as physical contact. This paper investigates the source of this error and introduces Adaptive Horizon Actor-Critic (AHAC), an FO-MBRL algorithm that reduces gradient error by adapting the model-based horizon to avoid stiff dynamics. Empirical findings reveal that AHAC outperforms MFRL baselines, attaining 40\% more reward across a set of locomotion tasks, and efficiently scaling to high-dimensional control environments with improved wall-clock-time efficiency.
HandyPriors: Physically Consistent Perception of Hand-Object Interactions with Differentiable Priors
Dec 03, 2023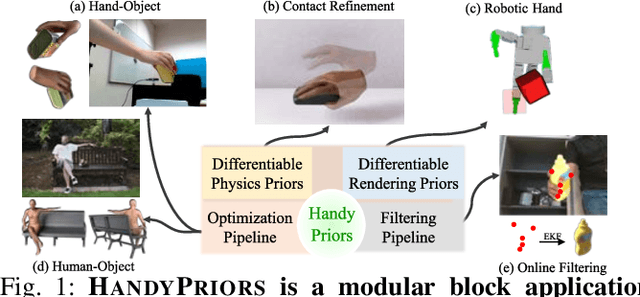
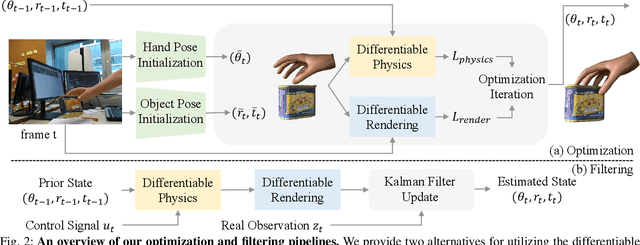
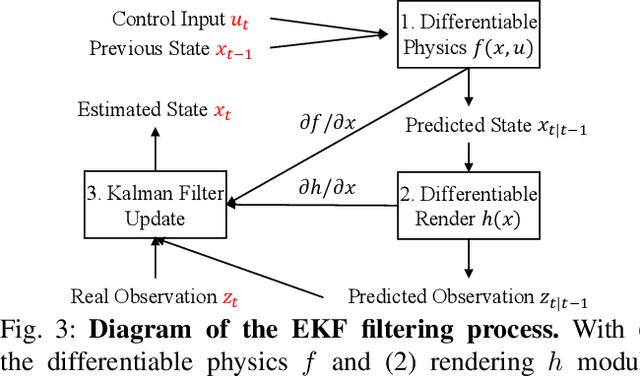
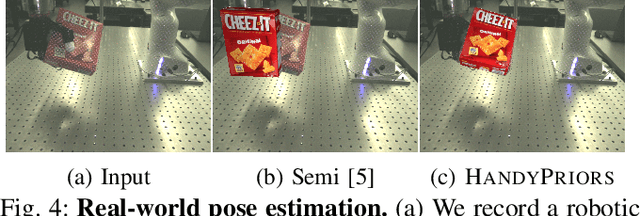
Various heuristic objectives for modeling hand-object interaction have been proposed in past work. However, due to the lack of a cohesive framework, these objectives often possess a narrow scope of applicability and are limited by their efficiency or accuracy. In this paper, we propose HandyPriors, a unified and general pipeline for pose estimation in human-object interaction scenes by leveraging recent advances in differentiable physics and rendering. Our approach employs rendering priors to align with input images and segmentation masks along with physics priors to mitigate penetration and relative-sliding across frames. Furthermore, we present two alternatives for hand and object pose estimation. The optimization-based pose estimation achieves higher accuracy, while the filtering-based tracking, which utilizes the differentiable priors as dynamics and observation models, executes faster. We demonstrate that HandyPriors attains comparable or superior results in the pose estimation task, and that the differentiable physics module can predict contact information for pose refinement. We also show that our approach generalizes to perception tasks, including robotic hand manipulation and human-object pose estimation in the wild.
STAMP: Differentiable Task and Motion Planning via Stein Variational Gradient Descent
Oct 03, 2023



Planning for many manipulation tasks, such as using tools or assembling parts, often requires both symbolic and geometric reasoning. Task and Motion Planning (TAMP) algorithms typically solve these problems by conducting a tree search over high-level task sequences while checking for kinematic and dynamic feasibility. While performant, most existing algorithms are highly inefficient as their time complexity grows exponentially with the number of possible actions and objects. Additionally, they only find a single solution to problems in which many feasible plans may exist. To address these limitations, we propose a novel algorithm called Stein Task and Motion Planning (STAMP) that leverages parallelization and differentiable simulation to efficiently search for multiple diverse plans. STAMP relaxes discrete-and-continuous TAMP problems into continuous optimization problems that can be solved using variational inference. Our algorithm builds upon Stein Variational Gradient Descent, a gradient-based variational inference algorithm, and parallelized differentiable physics simulators on the GPU to efficiently obtain gradients for inference. Further, we employ imitation learning to introduce action abstractions that reduce the inference problem to lower dimensions. We demonstrate our method on two TAMP problems and empirically show that STAMP is able to: 1) produce multiple diverse plans in parallel; and 2) search for plans more efficiently compared to existing TAMP baselines.
Fast-Grasp'D: Dexterous Multi-finger Grasp Generation Through Differentiable Simulation
Jun 13, 2023



Multi-finger grasping relies on high quality training data, which is hard to obtain: human data is hard to transfer and synthetic data relies on simplifying assumptions that reduce grasp quality. By making grasp simulation differentiable, and contact dynamics amenable to gradient-based optimization, we accelerate the search for high-quality grasps with fewer limiting assumptions. We present Grasp'D-1M: a large-scale dataset for multi-finger robotic grasping, synthesized with Fast- Grasp'D, a novel differentiable grasping simulator. Grasp'D- 1M contains one million training examples for three robotic hands (three, four and five-fingered), each with multimodal visual inputs (RGB+depth+segmentation, available in mono and stereo). Grasp synthesis with Fast-Grasp'D is 10x faster than GraspIt! and 20x faster than the prior Grasp'D differentiable simulator. Generated grasps are more stable and contact-rich than GraspIt! grasps, regardless of the distance threshold used for contact generation. We validate the usefulness of our dataset by retraining an existing vision-based grasping pipeline on Grasp'D-1M, and showing a dramatic increase in model performance, predicting grasps with 30% more contact, a 33% higher epsilon metric, and 35% lower simulated displacement. Additional details at https://dexgrasp.github.io.
Grasp'D: Differentiable Contact-rich Grasp Synthesis for Multi-fingered Hands
Aug 26, 2022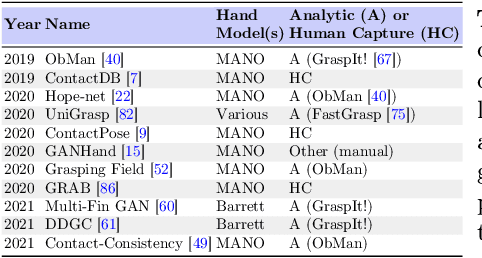

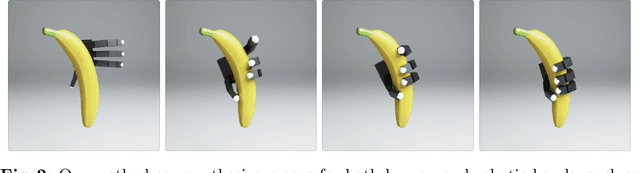
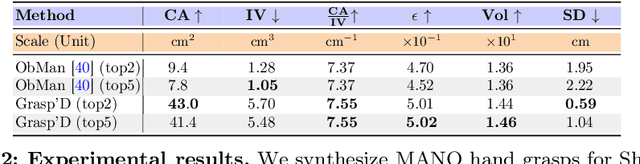
The study of hand-object interaction requires generating viable grasp poses for high-dimensional multi-finger models, often relying on analytic grasp synthesis which tends to produce brittle and unnatural results. This paper presents Grasp'D, an approach for grasp synthesis with a differentiable contact simulation from both known models as well as visual inputs. We use gradient-based methods as an alternative to sampling-based grasp synthesis, which fails without simplifying assumptions, such as pre-specified contact locations and eigengrasps. Such assumptions limit grasp discovery and, in particular, exclude high-contact power grasps. In contrast, our simulation-based approach allows for stable, efficient, physically realistic, high-contact grasp synthesis, even for gripper morphologies with high-degrees of freedom. We identify and address challenges in making grasp simulation amenable to gradient-based optimization, such as non-smooth object surface geometry, contact sparsity, and a rugged optimization landscape. Grasp'D compares favorably to analytic grasp synthesis on human and robotic hand models, and resultant grasps achieve over 4x denser contact, leading to significantly higher grasp stability. Video and code available at https://graspd-eccv22.github.io/.
Inferring Articulated Rigid Body Dynamics from RGBD Video
Mar 20, 2022
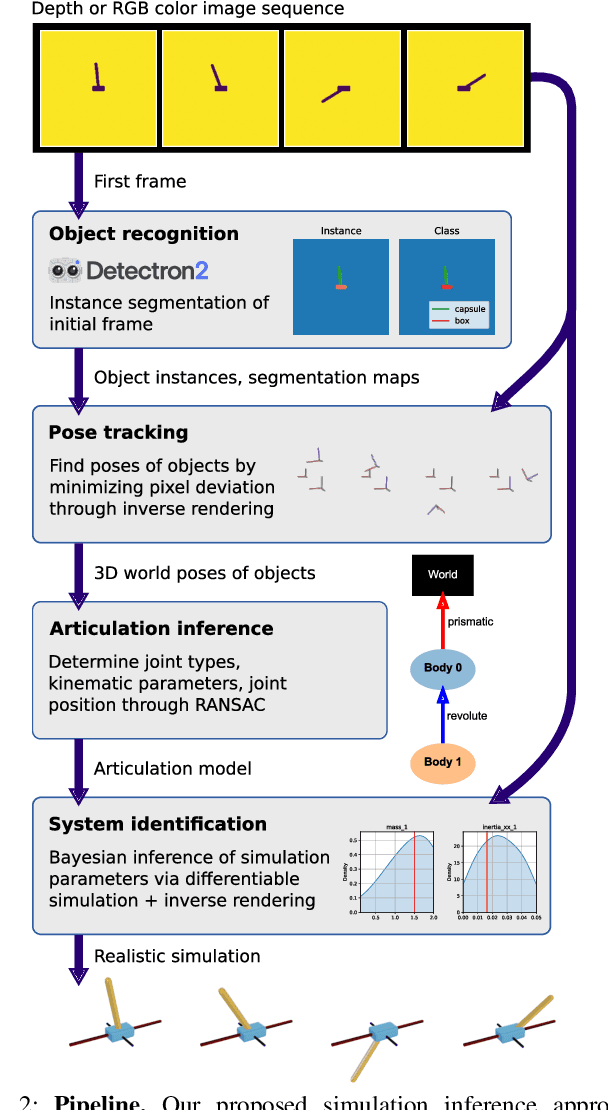
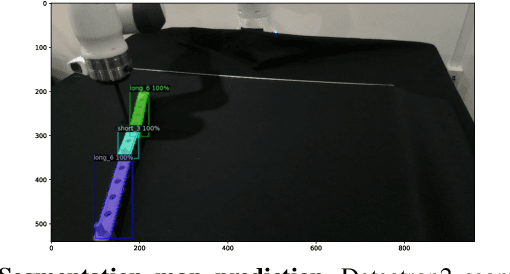
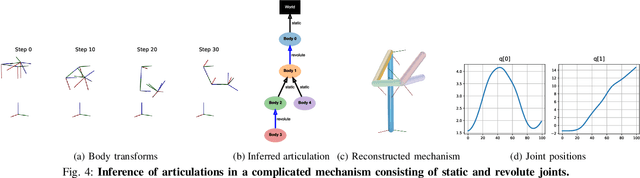
Being able to reproduce physical phenomena ranging from light interaction to contact mechanics, simulators are becoming increasingly useful in more and more application domains where real-world interaction or labeled data are difficult to obtain. Despite recent progress, significant human effort is needed to configure simulators to accurately reproduce real-world behavior. We introduce a pipeline that combines inverse rendering with differentiable simulation to create digital twins of real-world articulated mechanisms from depth or RGB videos. Our approach automatically discovers joint types and estimates their kinematic parameters, while the dynamic properties of the overall mechanism are tuned to attain physically accurate simulations. Control policies optimized in our derived simulation transfer successfully back to the original system, as we demonstrate on a simulated system. Further, our approach accurately reconstructs the kinematic tree of an articulated mechanism being manipulated by a robot, and highly nonlinear dynamics of a real-world coupled pendulum mechanism. Website: https://eric-heiden.github.io/video2sim
DiSECt: A Differentiable Simulator for Parameter Inference and Control in Robotic Cutting
Mar 19, 2022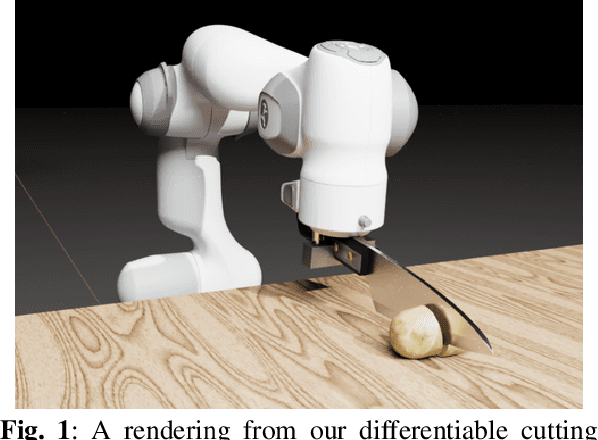
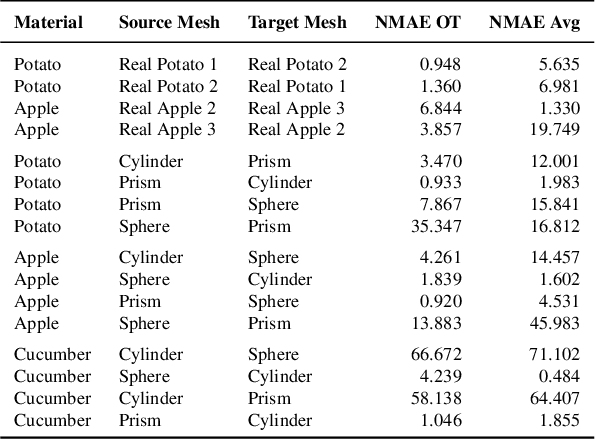
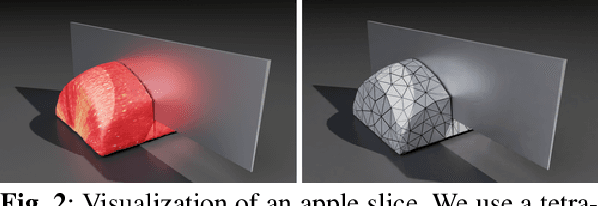
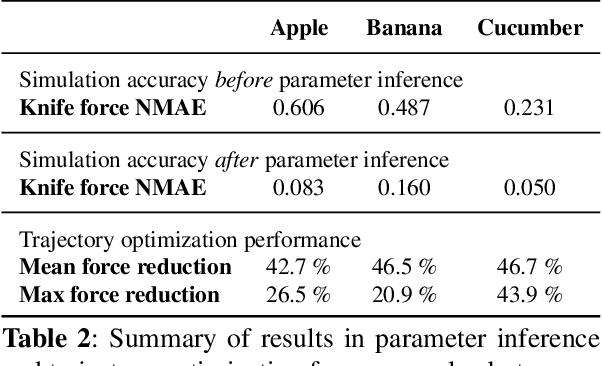
Robotic cutting of soft materials is critical for applications such as food processing, household automation, and surgical manipulation. As in other areas of robotics, simulators can facilitate controller verification, policy learning, and dataset generation. Moreover, differentiable simulators can enable gradient-based optimization, which is invaluable for calibrating simulation parameters and optimizing controllers. In this work, we present DiSECt: the first differentiable simulator for cutting soft materials. The simulator augments the finite element method (FEM) with a continuous contact model based on signed distance fields (SDF), as well as a continuous damage model that inserts springs on opposite sides of the cutting plane and allows them to weaken until zero stiffness, enabling crack formation. Through various experiments, we evaluate the performance of the simulator. We first show that the simulator can be calibrated to match resultant forces and deformation fields from a state-of-the-art commercial solver and real-world cutting datasets, with generality across cutting velocities and object instances. We then show that Bayesian inference can be performed efficiently by leveraging the differentiability of the simulator, estimating posteriors over hundreds of parameters in a fraction of the time of derivative-free methods. Next, we illustrate that control parameters in the simulation can be optimized to minimize cutting forces via lateral slicing motions. Finally, we conduct experiments on a real robot arm equipped with a slicing knife to infer simulation parameters from force measurements. By optimizing the slicing motion of the knife, we show on fruit cutting scenarios that the average knife force can be reduced by more than 40% compared to a vertical cutting motion. We publish code and additional materials on our project website at https://diff-cutting-sim.github.io.
Probabilistic Inference of Simulation Parameters via Parallel Differentiable Simulation
Sep 18, 2021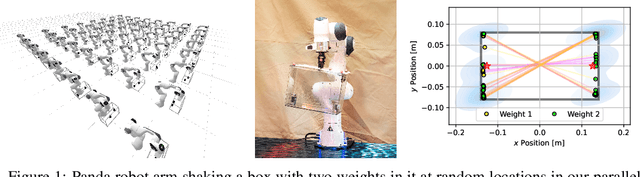

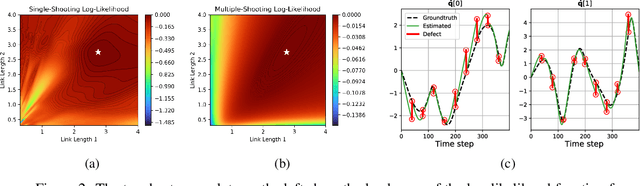
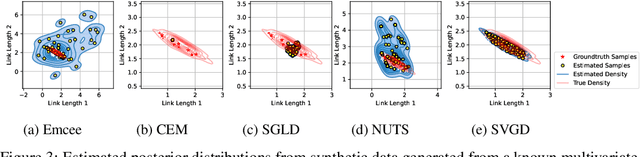
To accurately reproduce measurements from the real world, simulators need to have an adequate model of the physical system and require the parameters of the model be identified. We address the latter problem of estimating parameters through a Bayesian inference approach that approximates a posterior distribution over simulation parameters given real sensor measurements. By extending the commonly used Gaussian likelihood model for trajectories via the multiple-shooting formulation, our chosen particle-based inference algorithm Stein Variational Gradient Descent is able to identify highly nonlinear, underactuated systems. We leverage GPU code generation and differentiable simulation to evaluate the likelihood and its gradient for many particles in parallel. Our algorithm infers non-parametric distributions over simulation parameters more accurately than comparable baselines and handles constraints over parameters efficiently through gradient-based optimization. We evaluate estimation performance on several physical experiments. On an underactuated mechanism where a 7-DOF robot arm excites an object with an unknown mass configuration, we demonstrate how our inference technique can identify symmetries between the parameters and provide highly accurate predictions. Project website: https://uscresl.github.io/prob-diff-sim