 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Decentralized Routing Policies via Graph Attention-based Multi-Agent Reinforcement Learning in Lunar Delay-Tolerant Networks
Oct 23, 2025We present a fully decentralized routing framework for multi-robot exploration missions operating under the constraints of a Lunar Delay-Tolerant Network (LDTN). In this setting, autonomous rovers must relay collected data to a lander under intermittent connectivity and unknown mobility patterns. We formulate the problem as a Partially Observable Markov Decision Problem (POMDP) and propose a Graph Attention-based Multi-Agent Reinforcement Learning (GAT-MARL) policy that performs Centralized Training, Decentralized Execution (CTDE). Our method relies only on local observations and does not require global topology updates or packet replication, unlike classical approaches such as shortest path and controlled flooding-based algorithms. Through Monte Carlo simulations in randomized exploration environments, GAT-MARL provides higher delivery rates, no duplications, and fewer packet losses, and is able to leverage short-term mobility forecasts; offering a scalable solution for future space robotic systems for planetary exploration, as demonstrated by successful generalization to larger rover teams.
Flight Validation of Learning-Based Trajectory Optimization for the Astrobee Free-Flyer
May 08, 2025Although widely used in commercial and industrial robotics, trajectory optimization has seen limited use in space applications due to its high computational demands. In this work, we present flight results from experiments with the Astrobee free-flying robot on board the International Space Station (ISS), that demonstrate how machine learning can accelerate on-board trajectory optimization while preserving theoretical solver guarantees. To the best of the authors' knowledge, this is the first-ever demonstration of learning-based control on the ISS. Our approach leverages the GuSTO sequential convex programming framework and uses a neural network, trained offline, to map problem parameters to effective initial ``warm-start'' trajectories, paving the way for faster real-time optimization on resource-constrained space platforms.
Diffusion Policies for Generative Modeling of Spacecraft Trajectories
Jan 01, 2025Machine learning has demonstrated remarkable promise for solving the trajectory generation problem and in paving the way for online use of trajectory optimization for resource-constrained spacecraft. However, a key shortcoming in current machine learning-based methods for trajectory generation is that they require large datasets and even small changes to the original trajectory design requirements necessitate retraining new models to learn the parameter-to-solution mapping. In this work, we leverage compositional diffusion modeling to efficiently adapt out-of-distribution data and problem variations in a few-shot framework for 6 degree-of-freedom (DoF) powered descent trajectory generation. Unlike traditional deep learning methods that can only learn the underlying structure of one specific trajectory optimization problem, diffusion models are a powerful generative modeling framework that represents the solution as a probability density function (PDF) and this allows for the composition of PDFs encompassing a variety of trajectory design specifications and constraints. We demonstrate the capability of compositional diffusion models for inference-time 6 DoF minimum-fuel landing site selection and composable constraint representations. Using these samples as initial guesses for 6 DoF powered descent guidance enables dynamically feasible and computationally efficient trajectory generation.
Tight Constraint Prediction of Six-Degree-of-Freedom Transformer-based Powered Descent Guidance
Jan 01, 2025This work introduces Transformer-based Successive Convexification (T-SCvx), an extension of Transformer-based Powered Descent Guidance (T-PDG), generalizable for efficient six-degree-of-freedom (DoF) fuel-optimal powered descent trajectory generation. Our approach significantly enhances the sample efficiency and solution quality for nonconvex-powered descent guidance by employing a rotation invariant transformation of the sampled dataset. T-PDG was previously applied to the 3-DoF minimum fuel powered descent guidance problem, improving solution times by up to an order of magnitude compared to lossless convexification (LCvx). By learning to predict the set of tight or active constraints at the optimal control problem's solution, Transformer-based Successive Convexification (T-SCvx) creates the minimal reduced-size problem initialized with only the tight constraints, then uses the solution of this reduced problem to warm-start the direct optimization solver. 6-DoF powered descent guidance is known to be challenging to solve quickly and reliably due to the nonlinear and non-convex nature of the problem, the discretization scheme heavily influencing solution validity, and reference trajectory initialization determining algorithm convergence or divergence. Our contributions in this work address these challenges by extending T-PDG to learn the set of tight constraints for the successive convexification (SCvx) formulation of the 6-DoF powered descent guidance problem. In addition to reducing the problem size, feasible and locally optimal reference trajectories are also learned to facilitate convergence from the initial guess. T-SCvx enables onboard computation of real-time guidance trajectories, demonstrated by a 6-DoF Mars powered landing application problem.
ShadowNav: Autonomous Global Localization for Lunar Navigation in Darkness
May 06, 2024The ability to determine the pose of a rover in an inertial frame autonomously is a crucial capability necessary for the next generation of surface rover missions on other planetary bodies. Currently, most on-going rover missions utilize ground-in-the-loop interventions to manually correct for drift in the pose estimate and this human supervision bottlenecks the distance over which rovers can operate autonomously and carry out scientific measurements. In this paper, we present ShadowNav, an autonomous approach for global localization on the Moon with an emphasis on driving in darkness and at nighttime. Our approach uses the leading edge of Lunar craters as landmarks and a particle filtering approach is used to associate detected craters with known ones on an offboard map. We discuss the key design decisions in developing the ShadowNav framework for use with a Lunar rover concept equipped with a stereo camera and an external illumination source. Finally, we demonstrate the efficacy of our proposed approach in both a Lunar simulation environment and on data collected during a field test at Cinder Lakes, Arizona.
Federated Multi-Agent Mapping for Planetary Exploration
Apr 02, 2024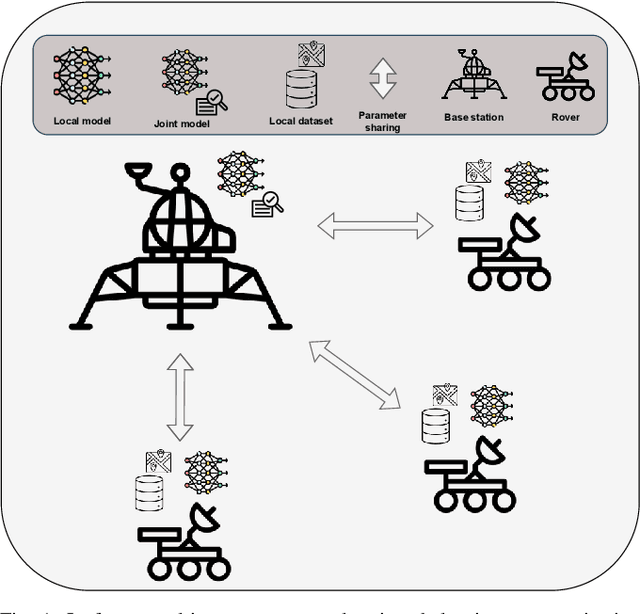

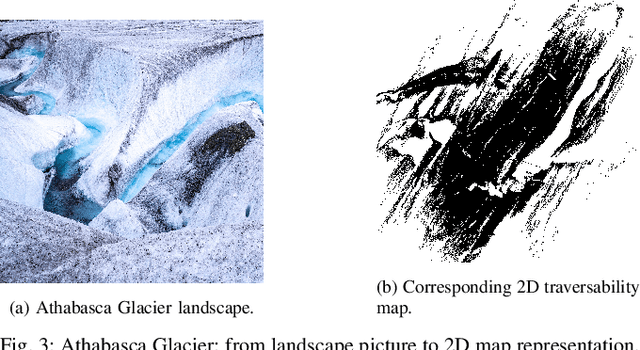
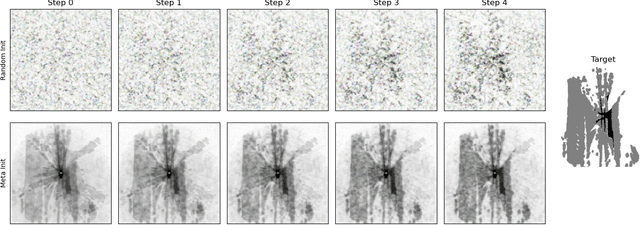
In multi-agent robotic exploration, managing and effectively utilizing the vast, heterogeneous data generated from dynamic environments poses a significant challenge. Federated learning (FL) is a promising approach for distributed mapping, addressing the challenges of decentralized data in collaborative learning. FL enables joint model training across multiple agents without requiring the centralization or sharing of raw data, overcoming bandwidth and storage constraints. Our approach leverages implicit neural mapping, representing maps as continuous functions learned by neural networks, for compact and adaptable representations. We further enhance this approach with meta-initialization on Earth datasets, pre-training the network to quickly learn new map structures. This combination demonstrates strong generalization to diverse domains like Martian terrain and glaciers. We rigorously evaluate this approach, demonstrating its effectiveness for real-world deployment in multi-agent exploration scenarios.
Constraint-Informed Learning for Warm Starting Trajectory Optimization
Dec 21, 2023Future spacecraft and surface robotic missions require increasingly capable autonomy stacks for exploring challenging and unstructured domains and trajectory optimization will be a cornerstone of such autonomy stacks. However, the nonlinear optimization solvers required remain too slow for use on relatively resource constrained flight-grade computers. In this work, we turn towards amortized optimization, a learning-based technique for accelerating optimization run times, and present TOAST: Trajectory Optimization with Merit Function Warm Starts. Offline, using data collected from a simulation, we train a neural network to learn a mapping to the full primal and dual solutions given the problem parameters. Crucially, we build upon recent results from decision-focused learning and present a set of decision-focused loss functions using the notion of merit functions for optimization problems. We show that training networks with such constraint-informed losses can better encode the structure of the trajectory optimization problem and jointly learn to reconstruct the primal-dual solution while also yielding improved constraint satisfaction. Through numerical experiments on a Lunar rover problem, we demonstrate that TOAST outperforms benchmark approaches in terms of both computation times and network prediction constraint satisfaction.
Improving Computational Efficiency for Powered Descent Guidance via Transformer-based Tight Constraint Prediction
Nov 09, 2023In this work, we present Transformer-based Powered Descent Guidance (T-PDG), a scalable algorithm for reducing the computational complexity of the direct optimization formulation of the spacecraft powered descent guidance problem. T-PDG uses data from prior runs of trajectory optimization algorithms to train a transformer neural network, which accurately predicts the relationship between problem parameters and the globally optimal solution for the powered descent guidance problem. The solution is encoded as the set of tight constraints corresponding to the constrained minimum-cost trajectory and the optimal final time of landing. By leveraging the attention mechanism of transformer neural networks, large sequences of time series data can be accurately predicted when given only the spacecraft state and landing site parameters. When applied to the real problem of Mars powered descent guidance, T-PDG reduces the time for computing the 3 degree of freedom fuel-optimal trajectory, when compared to lossless convexification, from an order of 1-8 seconds to less than 500 milliseconds. A safe and optimal solution is guaranteed by including a feasibility check in T-PDG before returning the final trajectory.
ShadowNav: Crater-Based Localization for Nighttime and Permanently Shadowed Region Lunar Navigation
Jan 11, 2023



There has been an increase in interest in missions that drive significantly longer distances per day than what has currently been performed. Further, some of these proposed missions require autonomous driving and absolute localization in darkness. For example, the Endurance A mission proposes to drive 1200km of its total traverse at night. The lack of natural light available during such missions limits what can be used as visual landmarks and the range at which landmarks can be observed. In order for planetary rovers to traverse long ranges, onboard absolute localization is critical to the ability of the rover to maintain its planned trajectory and avoid known hazardous regions. Currently, to accomplish absolute localization, a ground in the loop (GITL) operation is performed wherein a human operator matches local maps or images from onboard with orbital images and maps. This GITL operation limits the distance that can be driven in a day to a few hundred meters, which is the distance that the rover can maintain acceptable localization error via relative methods. Previous work has shown that using craters as landmarks is a promising approach for performing absolute localization on the moon during the day. In this work we present a method of absolute localization that utilizes craters as landmarks and matches detected crater edges on the surface with known craters in orbital maps. We focus on a localization method based on a perception system which has an external illuminator and a stereo camera. We evaluate (1) both monocular and stereo based surface crater edge detection techniques, (2) methods of scoring the crater edge matches for optimal localization, and (3) localization performance on simulated Lunar surface imagery at night. We demonstrate that this technique shows promise for maintaining absolute localization error of less than 10m required for most planetary rover missions.
NeBula: Quest for Robotic Autonomy in Challenging Environments; TEAM CoSTAR at the DARPA Subterranean Challenge
Mar 28, 2021



This paper presents and discusses algorithms, hardware, and software architecture developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), competing in the DARPA Subterranean Challenge. Specifically, it presents the techniques utilized within the Tunnel (2019) and Urban (2020) competitions, where CoSTAR achieved 2nd and 1st place, respectively. We also discuss CoSTAR's demonstrations in Martian-analog surface and subsurface (lava tubes) exploration. The paper introduces our autonomy solution, referred to as NeBula (Networked Belief-aware Perceptual Autonomy). NeBula is an uncertainty-aware framework that aims at enabling resilient and modular autonomy solutions by performing reasoning and decision making in the belief space (space of probability distributions over the robot and world states). We discuss various components of the NeBula framework, including: (i) geometric and semantic environment mapping; (ii) a multi-modal positioning system; (iii) traversability analysis and local planning; (iv) global motion planning and exploration behavior; (i) risk-aware mission planning; (vi) networking and decentralized reasoning; and (vii) learning-enabled adaptation. We discuss the performance of NeBula on several robot types (e.g. wheeled, legged, flying), in various environments. We discuss the specific results and lessons learned from fielding this solution in the challenging courses of the DARPA Subterranean Challenge competition.