 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollaborative Object Transportation Using MAVs via Passive Force Control
Paper and Code
Dec 15, 2016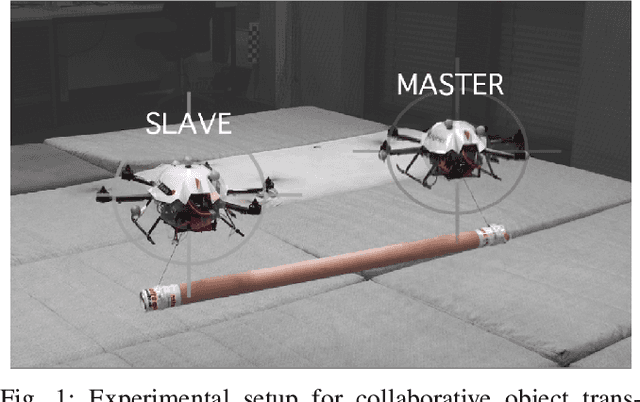
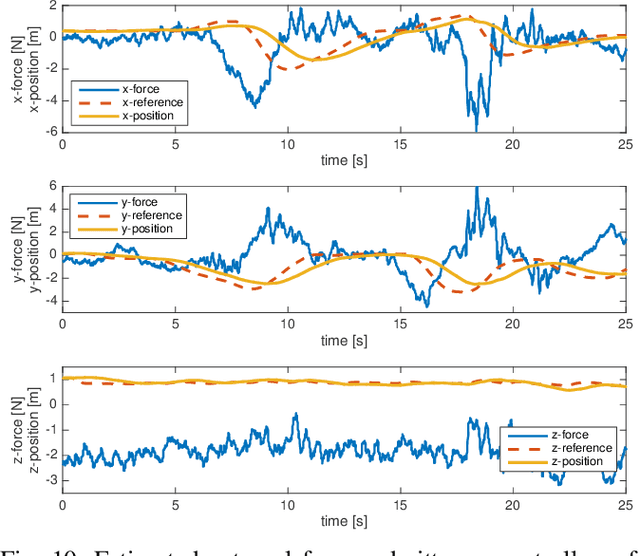
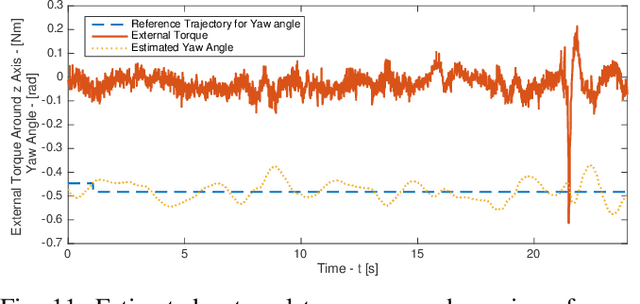
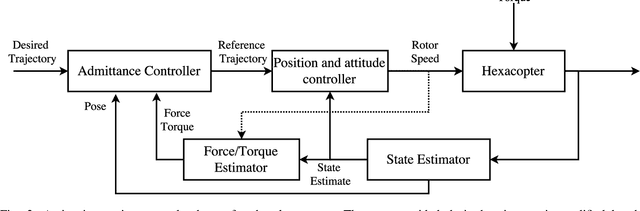
This paper shows a strategy based on passive force control for collaborative object transportation using Micro Aerial Vehicles (MAVs), focusing on the transportation of a bulky object by two hexacopters. The goal is to develop a robust approach which does not rely on: (a) communication links between the MAVs, (b) the knowledge of the payload shape and (c) the position of grasping point. The proposed approach is based on the master-slave paradigm, in which the slave agent guarantees compliance to the external force applied by the master to the payload via an admittance controller. The external force acting on the slave is estimated using a non-linear estimator based on the Unscented Kalman Filter (UKF) from the information provided by a visual inertial navigation system. Experimental results demonstrate the performance of the force estimator and show the collaborative transportation of a 1.2 m long object.