 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel Predictive Control for Micro Aerial Vehicles: A Survey
Nov 22, 2020
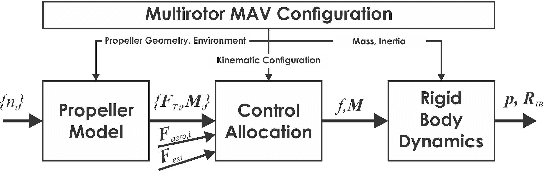
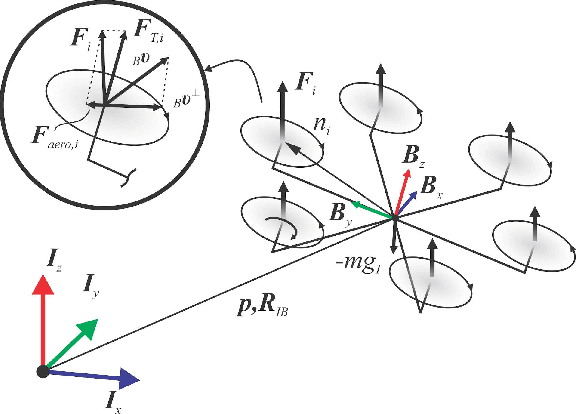
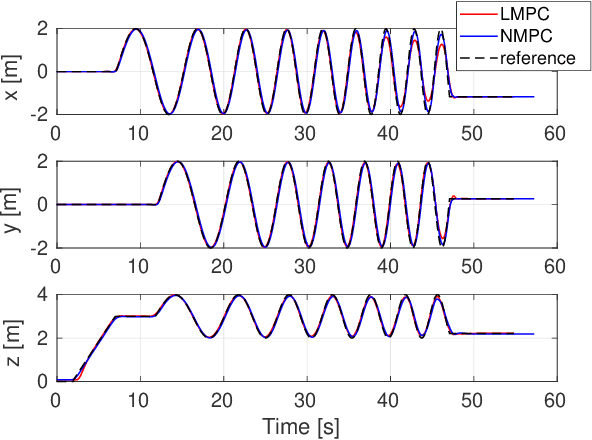
This paper presents a review of the design and application of model predictive control strategies for Micro Aerial Vehicles and specifically multirotor configurations such as quadrotors. The diverse set of works in the domain is organized based on the control law being optimized over linear or nonlinear dynamics, the integration of state and input constraints, possible fault-tolerant design, if reinforcement learning methods have been utilized and if the controller refers to free-flight or other tasks such as physical interaction or load transportation. A selected set of comparison results are also presented and serve to provide insight for the selection between linear and nonlinear schemes, the tuning of the prediction horizon, the importance of disturbance observer-based offset-free tracking and the intrinsic robustness of such methods to parameter uncertainty. Furthermore, an overview of recent research trends on the combined application of modern deep reinforcement learning techniques and model predictive control for multirotor vehicles is presented. Finally, this review concludes with explicit discussion regarding selected open-source software packages that deliver off-the-shelf model predictive control functionality applicable to a wide variety of Micro Aerial Vehicle configurations.
Learning dynamics for improving control of overactuated flying systems
Jun 23, 2020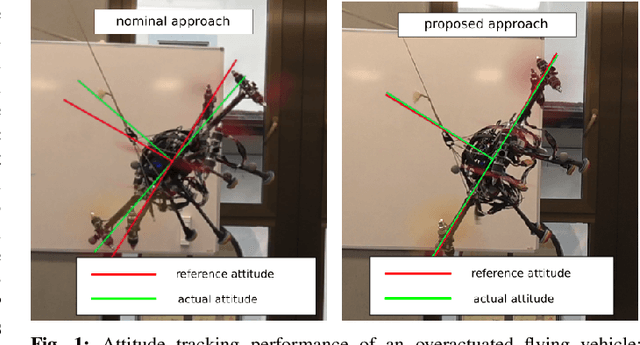
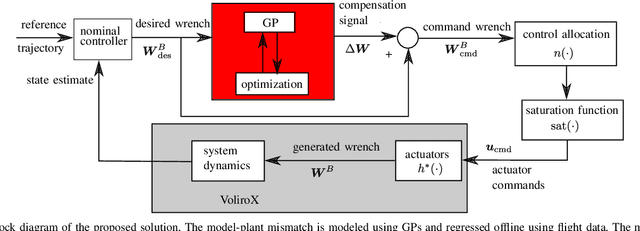
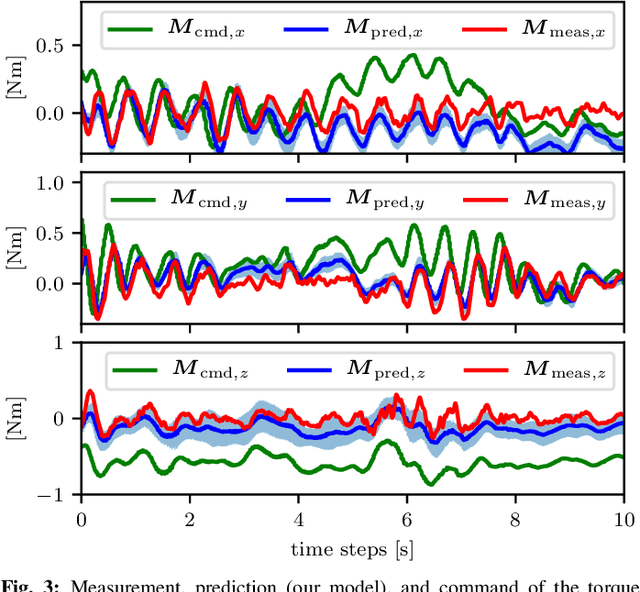
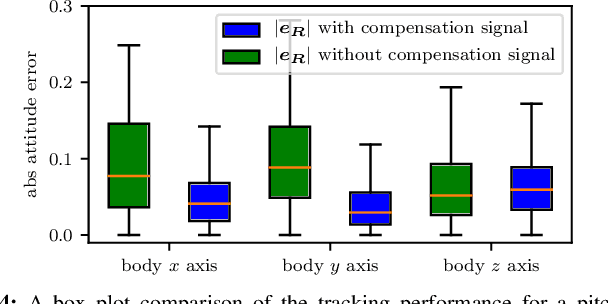
Overactuated omnidirectional flying vehicles are capable of generating force and torque in any direction, which is important for applications such as contact-based industrial inspection. This comes at the price of an increase in model complexity. These vehicles usually have non-negligible, repetitive dynamics that are hard to model, such as the aerodynamic interference between the propellers. This makes it difficult for high-performance trajectory tracking using a model-based controller. This paper presents an approach that combines a data-driven and a first-principle model for the system actuation and uses it to improve the controller. In a first step, the first-principle model errors are learned offline using a Gaussian Process (GP) regressor. At runtime, the first-principle model and the GP regressor are used jointly to obtain control commands. This is formulated as an optimization problem, which avoids ambiguous solutions present in a standard inverse model in overactuated systems, by only using forward models. The approach is validated using a tilt-arm overactuated omnidirectional flying vehicle performing attitude trajectory tracking. The results show that with our proposed method, the attitude trajectory error is reduced by 32% on average as compared to a nominal PID controller.
LQR-Assisted Whole-Body Control of a Wheeled Bipedal Robot with Kinematic Loops
May 23, 2020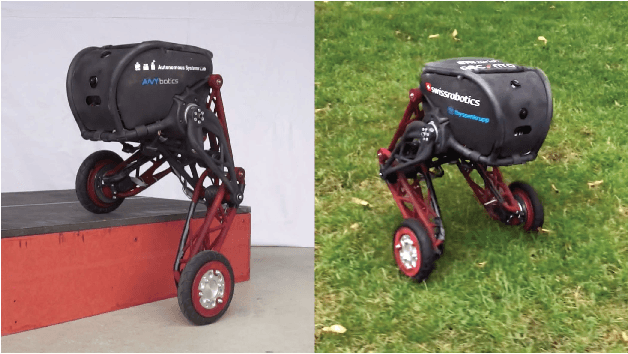
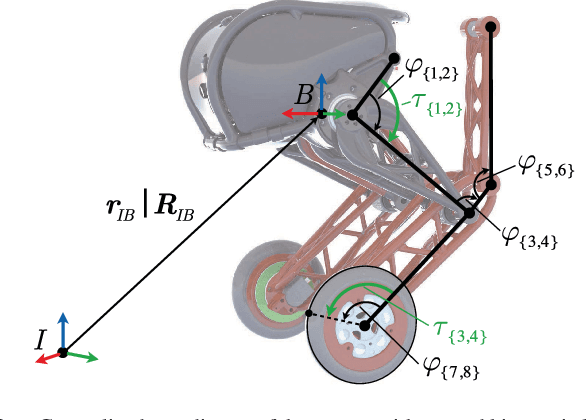
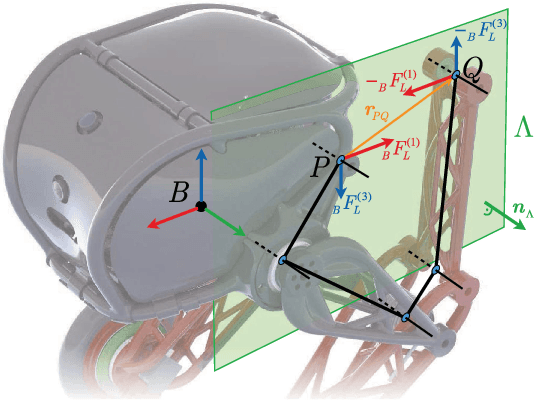
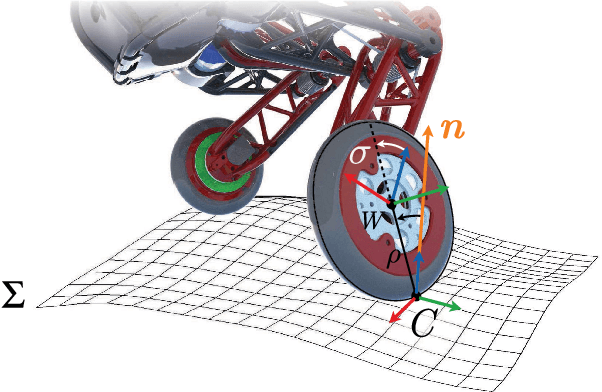
We present a hierarchical whole-body controller leveraging the full rigid body dynamics of the wheeled bipedal robot Ascento. We derive closed-form expressions for the dynamics of its kinematic loops in a way that readily generalizes to more complex systems. The rolling constraint is incorporated using a compact analytic solution based on rotation matrices. The non-minimum phase balancing dynamics are accounted for by including a linear-quadratic regulator as a motion task. Robustness when driving curves is increased by regulating the lean angle as a function of the zero-moment point. The proposed controller is computationally lightweight and significantly extends the rough-terrain capabilities and robustness of the system, as we demonstrate in several experiments.
* 8 pages, 10 figures, RA-L/ICRA 2020
Design and optimal control of a tiltrotor micro aerial vehicle for efficient omnidirectional flight
Mar 20, 2020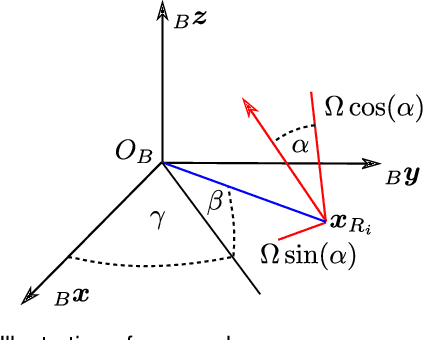
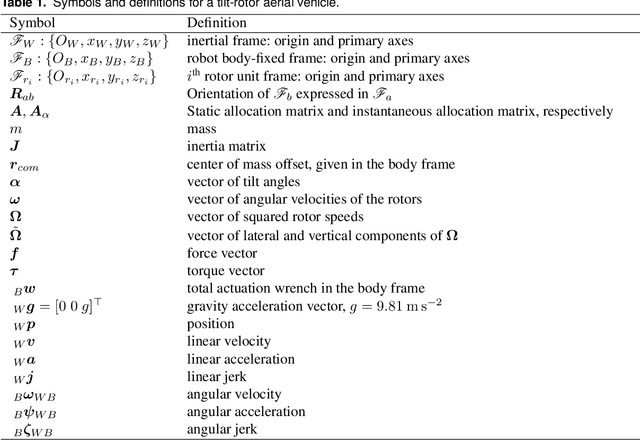
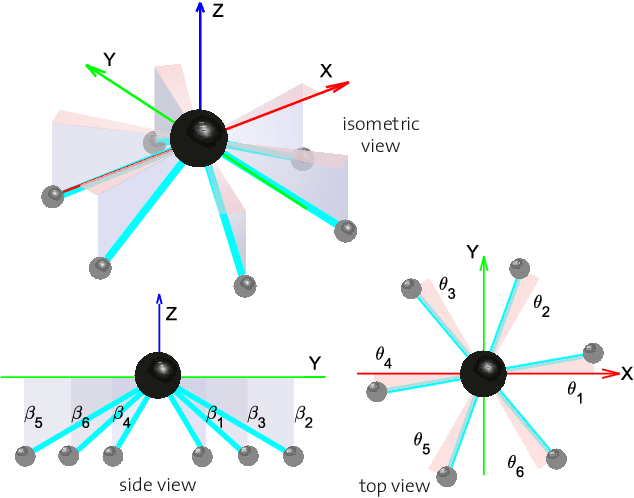
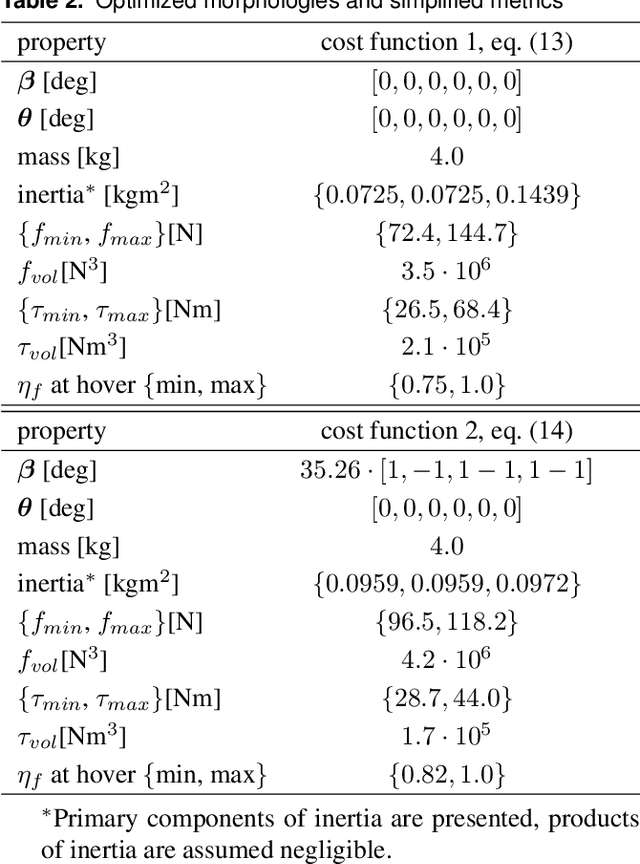
Omnidirectional micro aerial vehicles are a growing field of research, with demonstrated advantages for aerial interaction and uninhibited observation. While systems with complete pose omnidirectionality and high hover efficiency have been developed independently, a robust system that combines the two has not been demonstrated to date. This paper presents the design and optimal control of a novel omnidirectional vehicle that can exert a wrench in any orientation while maintaining efficient flight configurations. The system design is motivated by the result of a morphology design optimization. A six degrees of freedom optimal controller is derived, with an actuator allocation approach that implements task prioritization, and is robust to singularities. Flight experiments demonstrate and verify the system's capabilities.
Towards Efficient Full Pose Omnidirectionality with Overactuated MAVs
Oct 15, 2018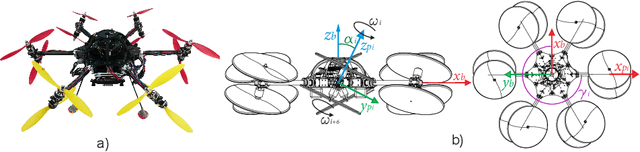
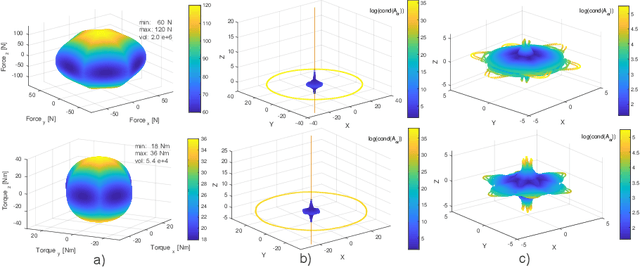
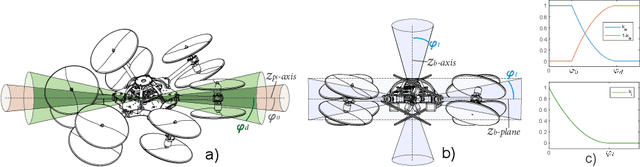
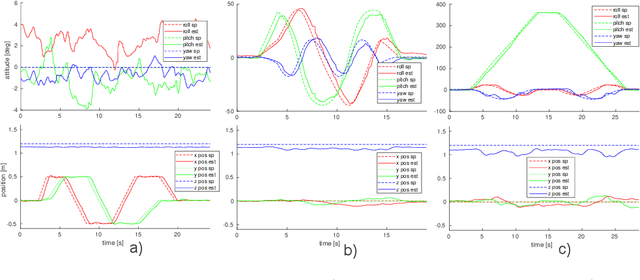
Omnidirectional MAVs are a growing field, with demonstrated advantages for aerial interaction and uninhibited observation. While systems with complete pose omnidirectionality and high hover efficiency have been developed independently, a robust system that combines the two has not been demonstrated to date. This paper presents VoliroX: a novel omnidirectional vehicle that can exert a wrench in any orientation while maintaining efficient flight configurations. The system design is presented, and a 6 DOF geometric control that is robust to singularities. Flight experiments further demonstrate and verify its capabilities.
Build Your Own Visual-Inertial Drone: A Cost-Effective and Open-Source Autonomous Drone
Sep 06, 2018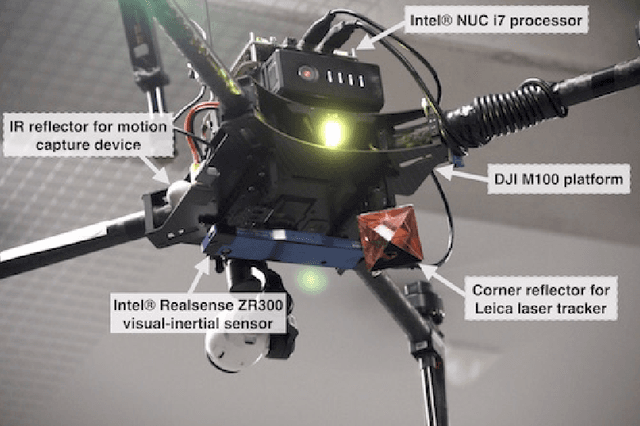
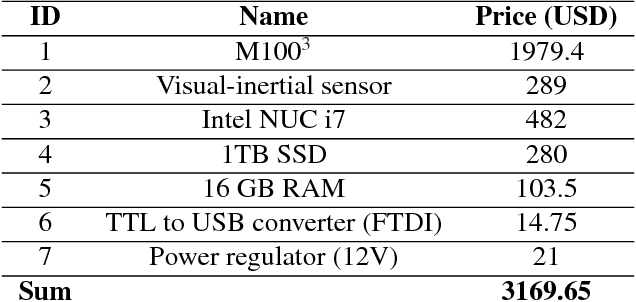
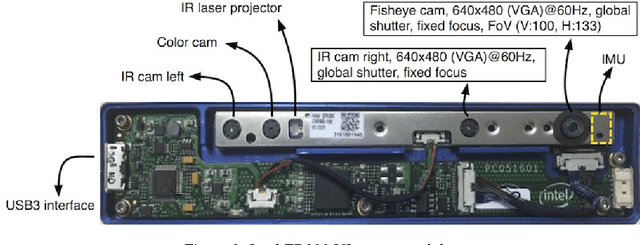
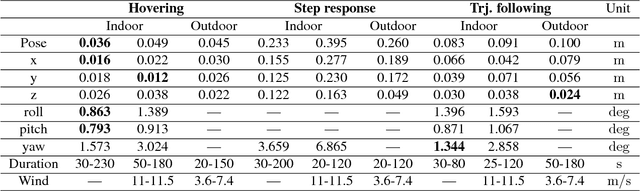
This paper describes an approach to building a cost-effective and research grade visual-inertial odometry aided vertical taking-off and landing (VTOL) platform. We utilize an off-the-shelf visual-inertial sensor, an onboard computer, and a quadrotor platform that are factory-calibrated and mass-produced, thereby sharing similar hardware and sensor specifications (e.g., mass, dimensions, intrinsic and extrinsic of camera-IMU systems, and signal-to-noise ratio). We then perform a system calibration and identification enabling the use of our visual-inertial odometry, multi-sensor fusion, and model predictive control frameworks with the off-the-shelf products. This implies that we can partially avoid tedious parameter tuning procedures for building a full system. The complete system is extensively evaluated both indoors using a motion capture system and outdoors using a laser tracker while performing hover and step responses, and trajectory following tasks in the presence of external wind disturbances. We achieve root-mean-square (RMS) pose errors between a reference and actual trajectories of 0.036m, while performing hover. We also conduct relatively long distance flight (~180m) experiments on a farm site and achieve 0.82% drift error of the total distance flight. This paper conveys the insights we acquired about the platform and sensor module and returns to the community as open-source code with tutorial documentation.
* 21 pages, 10 figures, accepted to IEEE Robotics & Automation Magazine
The ETH-MAV Team in the MBZ International Robotics Challenge
Mar 21, 2018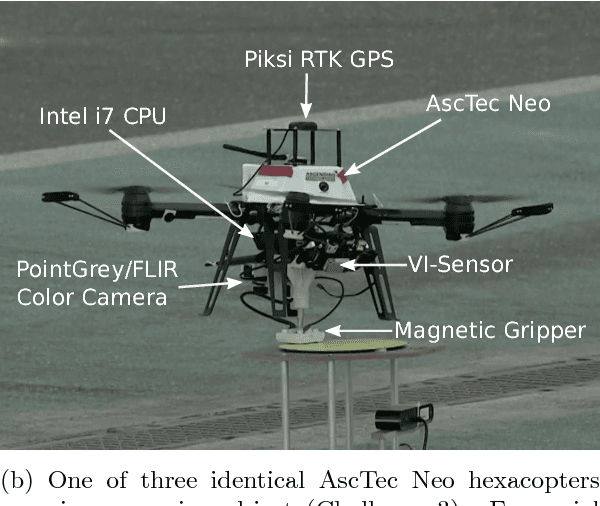
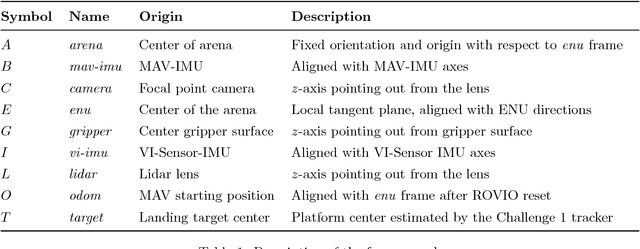
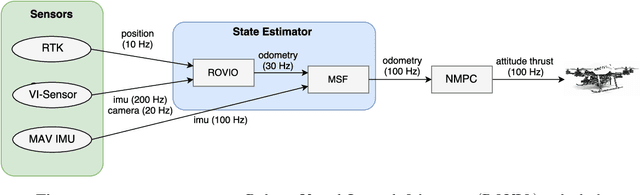
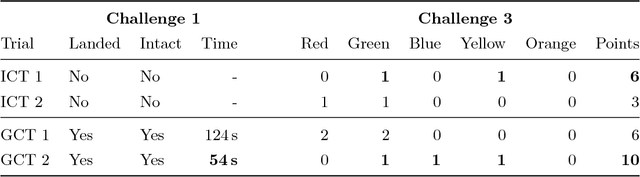
This article describes the hardware and software systems of the Micro Aerial Vehicle (MAV) platforms used by the ETH Zurich team in the 2017 Mohamed Bin Zayed International Robotics Challenge (MBZIRC). The aim was to develop robust outdoor platforms with the autonomous capabilities required for the competition, by applying and integrating knowledge from various fields, including computer vision, sensor fusion, optimal control, and probabilistic robotics. This paper presents the major components and structures of the system architectures, and reports on experimental findings for the MAV-based challenges in the competition. Main highlights include securing second place both in the individual search, pick, and place task of Challenge 3 and the Grand Challenge, with autonomous landing executed in less than one minute and a visual servoing success rate of over 90% for object pickups.
Voliro: An Omnidirectional Hexacopter With Tiltable Rotors
Jan 14, 2018
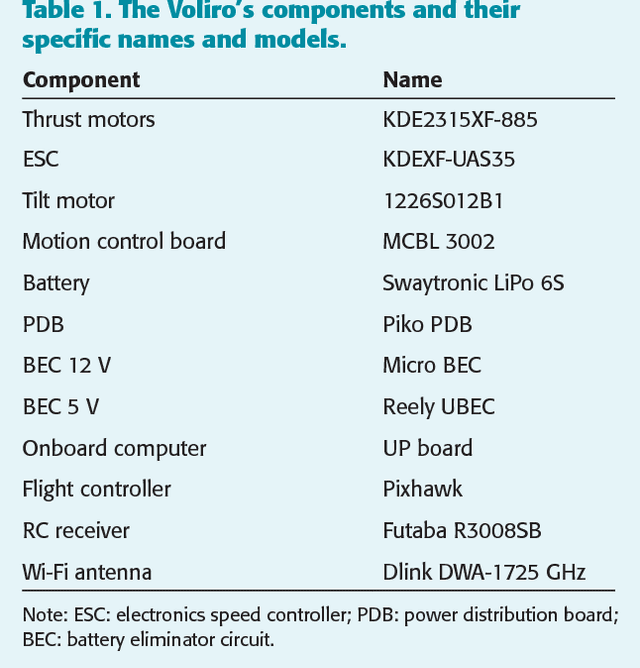
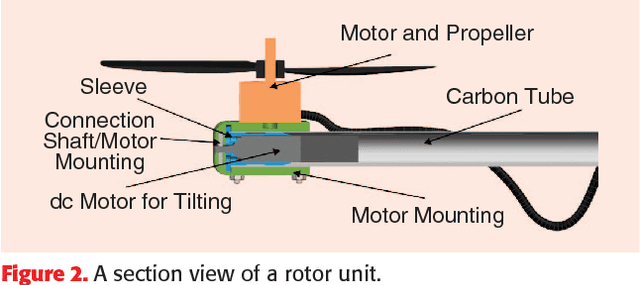
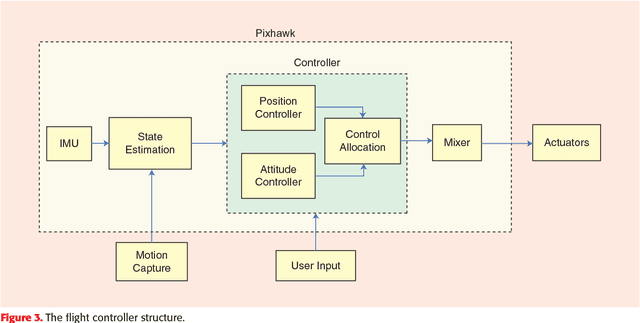
Extending the maneuverability of unmanned areal vehicles promises to yield a considerable increase in the areas in which these systems can be used. Some such applications are the performance of more complicated inspection tasks and the generation of complex uninterrupted movements of an attached camera. In this paper we address this challenge by presenting Voliro, a novel aerial platform that combines the advantages of existing multi-rotor systems with the agility of omnidirectionally controllable platforms. We propose the use of a hexacopter with tiltable rotors allowing the system to decouple the control of position and orientation. The contributions of this work involve the mechanical design as well as a controller with the corresponding allocation scheme. This work also discusses the design challenges involved when turning the concept of a hexacopter with tiltable rotors into an actual prototype. The agility of the system is demonstrated and evaluated in real- world experiments.
Robust Collaborative Object Transportation Using Multiple MAVs
Nov 23, 2017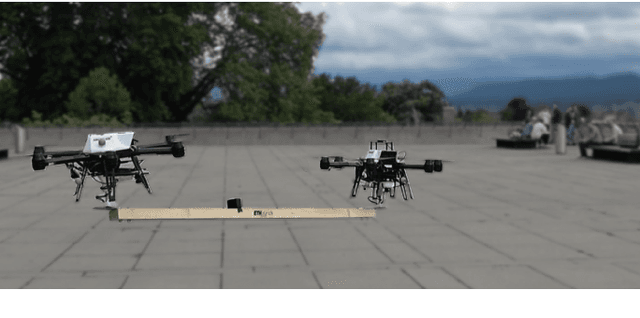
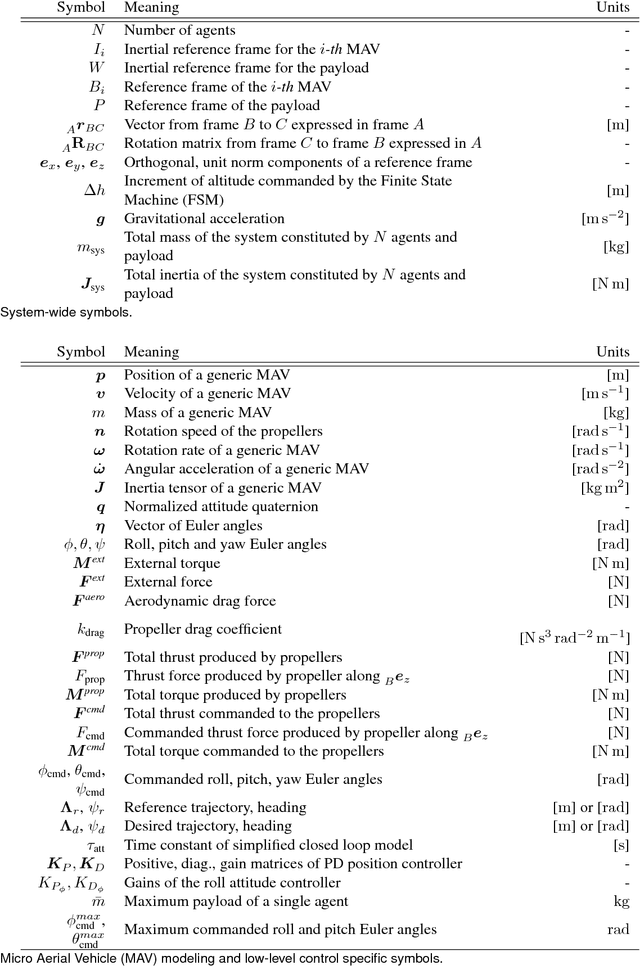

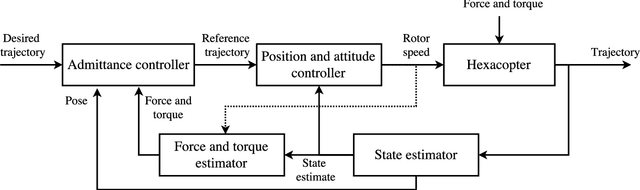
Collaborative object transportation using multiple Micro Aerial Vehicles (MAVs) with limited communication is a challenging problem. In this paper we address the problem of multiple MAVs mechanically coupled to a bulky object for transportation purposes without explicit communication between agents. The apparent physical properties of each agent are reshaped to achieve robustly stable transportation. Parametric uncertainties and unmodeled dynamics of each agent are quantified and techniques from robust control theory are employed to choose the physical parameters of each agent to guarantee stability. Extensive simulation analysis and experimental results show that the proposed method guarantees stability in worst case scenarios.
A Decentralized Multi-Agent Unmanned Aerial System to Search, Pick Up, and Relocate Objects
Sep 13, 2017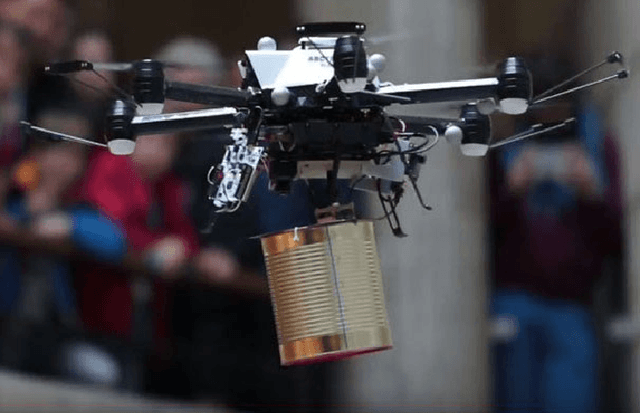
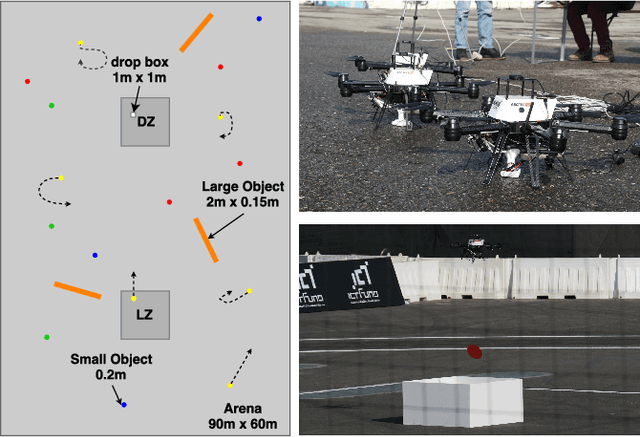

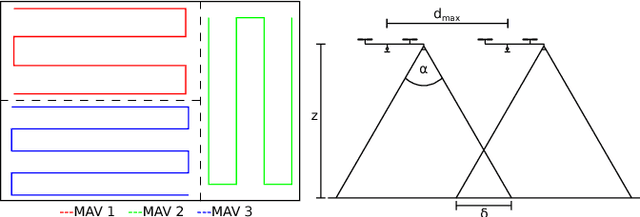
We present a fully integrated autonomous multi- robot aerial system for finding and collecting moving and static objects with unknown locations. This task addresses multiple relevant problems in search and rescue (SAR) robotics such as multi-agent aerial exploration, object detection and tracking, and aerial gripping. Usually, the community tackles these problems individually but the integration into a working system generates extra complexity which is rarely addressed. We show that this task can be solved reliably using only simple components. Our decentralized system uses accurate global state estimation, reactive collision avoidance, and sweep planning for multi-agent exploration. Objects are detected, tracked, and picked up using blob detection, inverse 3D-projection, Kalman filtering, visual-servoing, and a magnetic gripper. We evaluate the individual components of our system on the real platform. The full system has been deployed successfully in various public demonstrations, field tests, and the Mohamed Bin Zayed International Robotics Challenge 2017 (MBZIRC). Among the contestants we showed reliable performances and reached second place out of 17 in the individual challenge.