 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWildOS: Open-Vocabulary Object Search in the Wild
Feb 22, 2026Autonomous navigation in complex, unstructured outdoor environments requires robots to operate over long ranges without prior maps and limited depth sensing. In such settings, relying solely on geometric frontiers for exploration is often insufficient. In such settings, the ability to reason semantically about where to go and what is safe to traverse is crucial for robust, efficient exploration. This work presents WildOS, a unified system for long-range, open-vocabulary object search that combines safe geometric exploration with semantic visual reasoning. WildOS builds a sparse navigation graph to maintain spatial memory, while utilizing a foundation-model-based vision module, ExploRFM, to score frontier nodes of the graph. ExploRFM simultaneously predicts traversability, visual frontiers, and object similarity in image space, enabling real-time, onboard semantic navigation tasks. The resulting vision-scored graph enables the robot to explore semantically meaningful directions while ensuring geometric safety. Furthermore, we introduce a particle-filter-based method for coarse localization of the open-vocabulary target query, that estimates candidate goal positions beyond the robot's immediate depth horizon, enabling effective planning toward distant goals. Extensive closed-loop field experiments across diverse off-road and urban terrains demonstrate that WildOS enables robust navigation, significantly outperforming purely geometric and purely vision-based baselines in both efficiency and autonomy. Our results highlight the potential of vision foundation models to drive open-world robotic behaviors that are both semantically informed and geometrically grounded. Project Page: https://leggedrobotics.github.io/wildos/
An Addendum to NeBula: Towards Extending TEAM CoSTAR's Solution to Larger Scale Environments
Apr 18, 2025This paper presents an appendix to the original NeBula autonomy solution developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), participating in the DARPA Subterranean Challenge. Specifically, this paper presents extensions to NeBula's hardware, software, and algorithmic components that focus on increasing the range and scale of the exploration environment. From the algorithmic perspective, we discuss the following extensions to the original NeBula framework: (i) large-scale geometric and semantic environment mapping; (ii) an adaptive positioning system; (iii) probabilistic traversability analysis and local planning; (iv) large-scale POMDP-based global motion planning and exploration behavior; (v) large-scale networking and decentralized reasoning; (vi) communication-aware mission planning; and (vii) multi-modal ground-aerial exploration solutions. We demonstrate the application and deployment of the presented systems and solutions in various large-scale underground environments, including limestone mine exploration scenarios as well as deployment in the DARPA Subterranean challenge.
Enabling Novel Mission Operations and Interactions with ROSA: The Robot Operating System Agent
Oct 09, 2024The advancement of robotic systems has revolutionized numerous industries, yet their operation often demands specialized technical knowledge, limiting accessibility for non-expert users. This paper introduces ROSA (Robot Operating System Agent), an AI-powered agent that bridges the gap between the Robot Operating System (ROS) and natural language interfaces. By leveraging state-of-the-art language models and integrating open-source frameworks, ROSA enables operators to interact with robots using natural language, translating commands into actions and interfacing with ROS through well-defined tools. ROSA's design is modular and extensible, offering seamless integration with both ROS1 and ROS2, along with safety mechanisms like parameter validation and constraint enforcement to ensure secure, reliable operations. While ROSA is originally designed for ROS, it can be extended to work with other robotics middle-wares to maximize compatibility across missions. ROSA enhances human-robot interaction by democratizing access to complex robotic systems, empowering users of all expertise levels with multi-modal capabilities such as speech integration and visual perception. Ethical considerations are thoroughly addressed, guided by foundational principles like Asimov's Three Laws of Robotics, ensuring that AI integration promotes safety, transparency, privacy, and accountability. By making robotic technology more user-friendly and accessible, ROSA not only improves operational efficiency but also sets a new standard for responsible AI use in robotics and potentially future mission operations. This paper introduces ROSA's architecture and showcases initial mock-up operations in JPL's Mars Yard, a laboratory, and a simulation using three different robots. The core ROSA library is available as open-source.
Copiloting Autonomous Multi-Robot Missions: A Game-inspired Supervisory Control Interface
Apr 13, 2022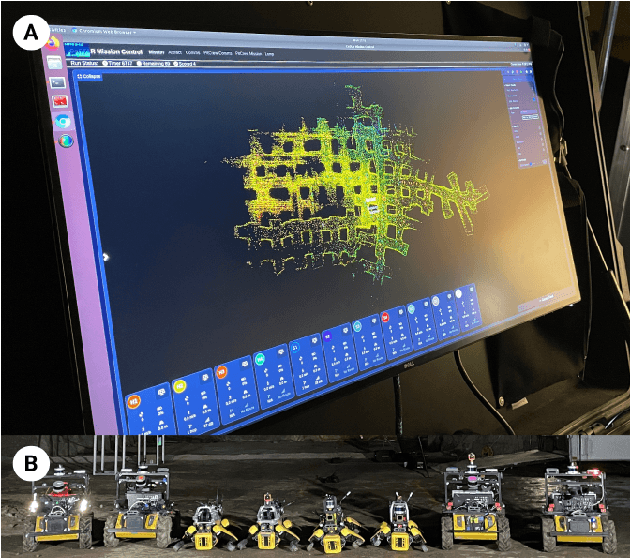
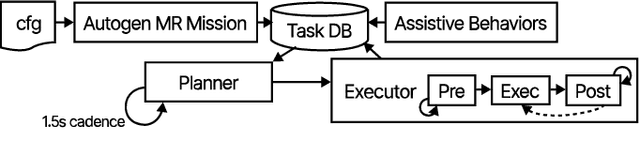
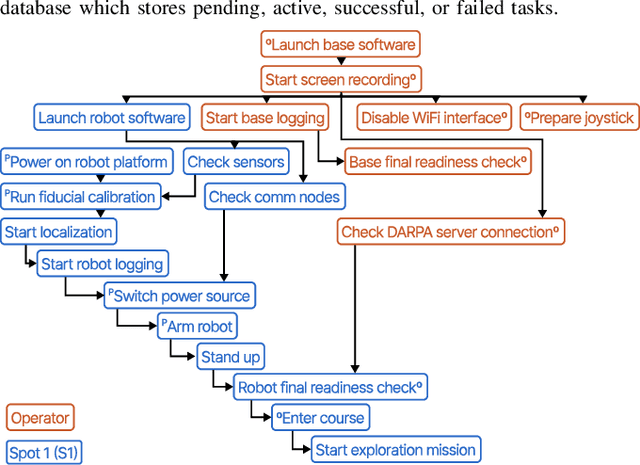
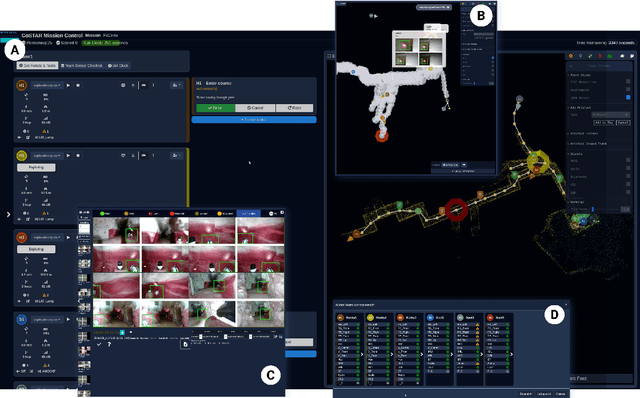
Real-world deployment of new technology and capabilities can be daunting. The recent DARPA Subterranean (SubT) Challenge, for instance, aimed at the advancement of robotic platforms and autonomy capabilities in three one-year development pushes. While multi-agent systems are traditionally deployed in controlled and structured environments that allow for controlled testing (e.g., warehouses), the SubT challenge targeted various types of unknown underground environments that imposed the risk of robot loss in the case of failure. In this work, we introduce a video game-inspired interface, an autonomous mission assistant, and test and deploy these using a heterogeneous multi-agent system in challenging environments. This work leads to improved human-supervisory control for a multi-agent system reducing overhead from application switching, task planning, execution, and verification while increasing available exploration time with this human-autonomy teaming platform.
NeBula: Quest for Robotic Autonomy in Challenging Environments; TEAM CoSTAR at the DARPA Subterranean Challenge
Mar 28, 2021



This paper presents and discusses algorithms, hardware, and software architecture developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), competing in the DARPA Subterranean Challenge. Specifically, it presents the techniques utilized within the Tunnel (2019) and Urban (2020) competitions, where CoSTAR achieved 2nd and 1st place, respectively. We also discuss CoSTAR's demonstrations in Martian-analog surface and subsurface (lava tubes) exploration. The paper introduces our autonomy solution, referred to as NeBula (Networked Belief-aware Perceptual Autonomy). NeBula is an uncertainty-aware framework that aims at enabling resilient and modular autonomy solutions by performing reasoning and decision making in the belief space (space of probability distributions over the robot and world states). We discuss various components of the NeBula framework, including: (i) geometric and semantic environment mapping; (ii) a multi-modal positioning system; (iii) traversability analysis and local planning; (iv) global motion planning and exploration behavior; (i) risk-aware mission planning; (vi) networking and decentralized reasoning; and (vii) learning-enabled adaptation. We discuss the performance of NeBula on several robot types (e.g. wheeled, legged, flying), in various environments. We discuss the specific results and lessons learned from fielding this solution in the challenging courses of the DARPA Subterranean Challenge competition.
Decentralized Connectivity Control in Quadcopters: a Field Study of Communication Performance
Sep 23, 2019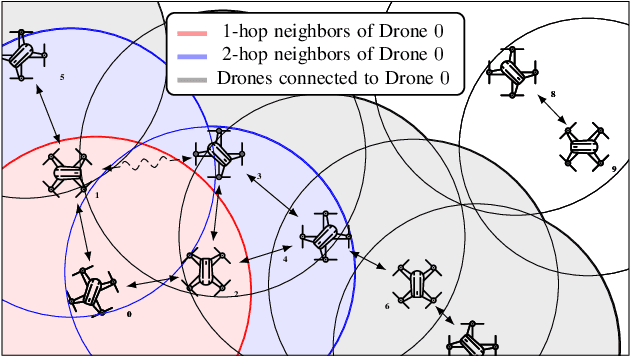
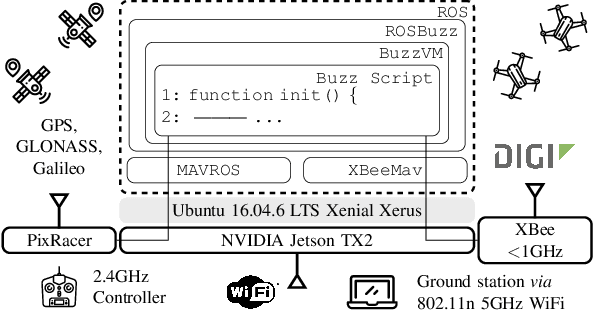
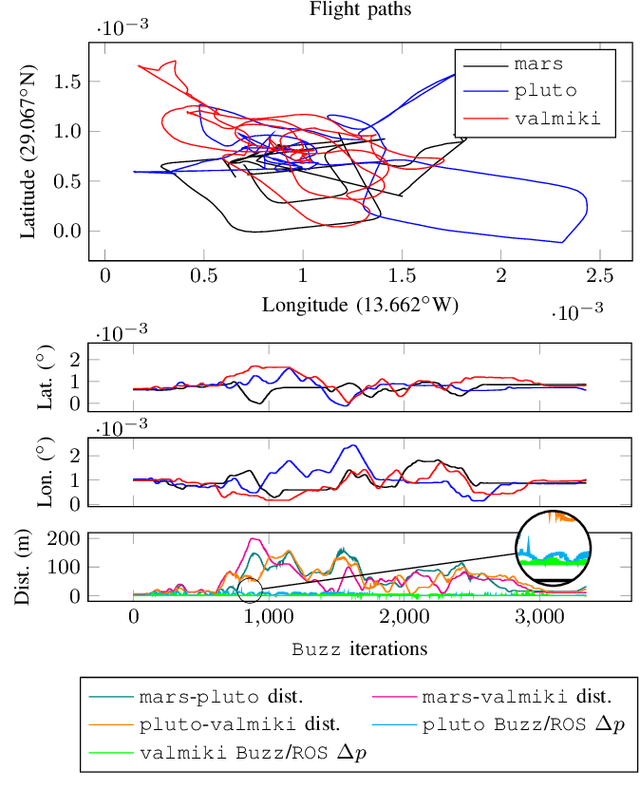
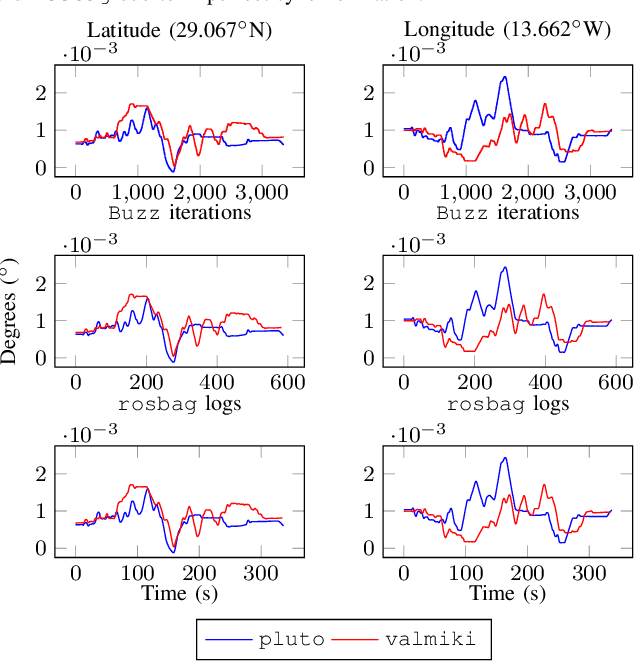
Redundancy and parallelism make decentralized multi-robot systems appealing solutions for the exploration of extreme environments. However, effective cooperation often requires team-wide connectivity and a carefully designed communication strategy. Several recently proposed decentralized connectivity maintenance approaches exploit elegant algebraic results drawn from spectral graph theory. Yet, these proposals are rarely taken beyond simulations or laboratory implementations. In this work, we present two major contributions: (i) we describe the full-stack implementation---from hardware to software---of a decentralized control law for robust connectivity maintenance; and (ii) we assess, in the field, our setup's ability to correctly exchange all the necessary information required to maintain connectivity in a team of quadcopters.
Stop, Think, and Roll: Online Gain Optimization for Resilient Multi-robot Topologies
Sep 19, 2018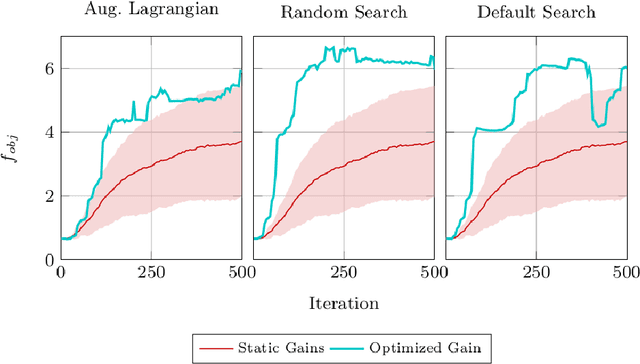
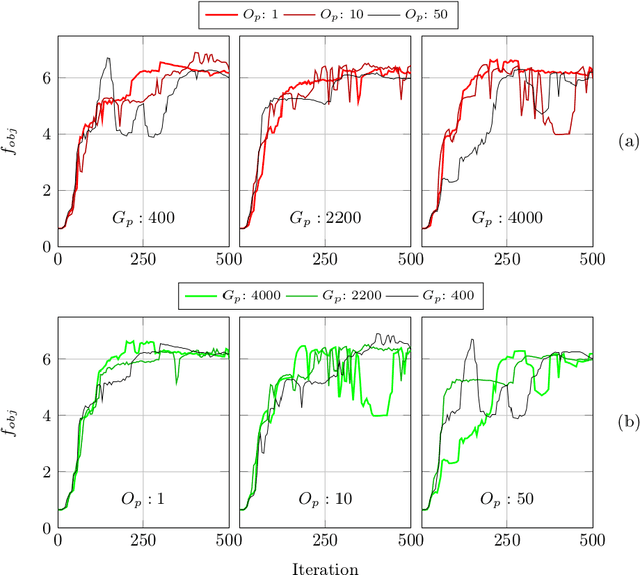

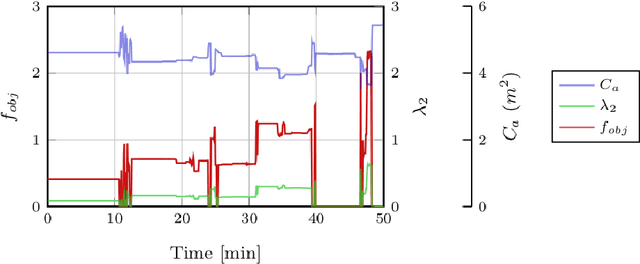
Efficient networking of many-robot systems is considered one of the grand challenges of robotics. In this article, we address the problem of achieving resilient, dynamic interconnection topologies in multi-robot systems. In scenarios in which the overall network topology is constantly changing, we aim at avoiding the onset of single points of failure, particularly situations in which the failure of a single robot causes the loss of connectivity for the overall network. We propose a method based on the combination of multiple control objectives and we introduce an online distributed optimization strategy that computes the optimal choice of control parameters for each robot. This ensures that the connectivity of the multi-robot system is not only preserved but also made more resilient to failures, as the network topology evolves. We provide simulation results, as well as experiments with real robots to validate theoretical findings and demonstrate the portability to robotic hardware.