 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond a Shadow of a Doubt: Close Proximity Geometry Reconstruction Using FMCW Radar Shadow Effects
Jun 24, 2026Reliable perception in adverse conditions remains challenging for autonomous systems, as cameras and LiDAR degrade in poor lighting or weather. Millimetre-wave FMCW radar is robust to such conditions, but its elevation collapse limits geometric reasoning. We observe that vehicle chassis occlude radar rays and form a distinctive geometric shadow, and its consistency can enable us to infer useful information about objects whose returns intersect this shadow. Motivated by this observation, we propose a method to recover the 3D, in-plane inclination of nearby slender vertical objects from this cue. The object inclination is retrieved without assumptions about the wider scene, but through an analytical, closed-form mapping between its radar return boundaries and the opening angle. Validation in simulation and experimentation on a Navtech CTS350-X radar shows that inclinations can be estimated under practical conditions, with segmentation of the object in the radar scan emerging as the main bottleneck. This work highlights chassis shadows as a novel geometric cue, extending the role of 2D rotating radar beyond localisation and toward 3D scene reconstruction.
Multi-Robot Planning and Control from CCTV Camera Networks in a Real Warehouse
Jun 04, 2026Off-board control of mobile robots from cameras embedded in the environment offers a practical path to scalable autonomy, moving sensing and compute off the robots. We extend this idea from the single-robot case to coordinated fleets in a real warehouse, driving multiple robots with only a distributed CCTV network and edge compute. The system operates entirely in image space over an uncalibrated, pixel-wise topological camera graph, enabling wide-area operation with flexible camera placement. A hierarchical planner selects a camera sequence per robot and plans its image-space motion through each view, coordinating robots with a prioritised-then-joint strategy and treating overlapping camera regions as shared resources held by one robot at a time to prevent collisions and deadlocks. We validate the approach in a real warehouse with four robots and 30 cameras across six 27 m aisles, reporting mission times and coordination statistics. To our knowledge, this is the first field demonstration of multi-robot planning and coordination using only an external camera network and off-board compute, with robots carrying no task-specific navigation hardware.
3D Foundation Model-Based Loop Closing for Decentralized Collaborative SLAM
Feb 02, 2026Decentralized Collaborative Simultaneous Localization And Mapping (C-SLAM) techniques often struggle to identify map overlaps due to significant viewpoint variations among robots. Motivated by recent advancements in 3D foundation models, which can register images despite large viewpoint differences, we propose a robust loop closing approach that leverages these models to establish inter-robot measurements. In contrast to resource-intensive methods requiring full 3D reconstruction within a centralized map, our approach integrates foundation models into existing SLAM pipelines, yielding scalable and robust multi-robot mapping. Our contributions include: (1) integrating 3D foundation models to reliably estimate relative poses from monocular image pairs within decentralized C-SLAM; (2) introducing robust outlier mitigation techniques critical to the use of these relative poses; and (3) developing specialized pose graph optimization formulations that efficiently resolve scale ambiguities. We evaluate our method against state-of-the-art approaches, demonstrating improvements in localization and mapping accuracy, alongside significant gains in computational and memory efficiency. These results highlight the potential of our approach for deployment in large-scale multi-robot scenarios.
VDNA-PR: Using General Dataset Representations for Robust Sequential Visual Place Recognition
Mar 14, 2024



This paper adapts a general dataset representation technique to produce robust Visual Place Recognition (VPR) descriptors, crucial to enable real-world mobile robot localisation. Two parallel lines of work on VPR have shown, on one side, that general-purpose off-the-shelf feature representations can provide robustness to domain shifts, and, on the other, that fused information from sequences of images improves performance. In our recent work on measuring domain gaps between image datasets, we proposed a Visual Distribution of Neuron Activations (VDNA) representation to represent datasets of images. This representation can naturally handle image sequences and provides a general and granular feature representation derived from a general-purpose model. Moreover, our representation is based on tracking neuron activation values over the list of images to represent and is not limited to a particular neural network layer, therefore having access to high- and low-level concepts. This work shows how VDNAs can be used for VPR by learning a very lightweight and simple encoder to generate task-specific descriptors. Our experiments show that our representation can allow for better robustness than current solutions to serious domain shifts away from the training data distribution, such as to indoor environments and aerial imagery.
What you see is what you get: Experience ranking with deep neural dataset-to-dataset similarity for topological localisation
Oct 20, 2023



Recalling the most relevant visual memories for localisation or understanding a priori the likely outcome of localisation effort against a particular visual memory is useful for efficient and robust visual navigation. Solutions to this problem should be divorced from performance appraisal against ground truth - as this is not available at run-time - and should ideally be based on generalisable environmental observations. For this, we propose applying the recently developed Visual DNA as a highly scalable tool for comparing datasets of images - in this work, sequences of map and live experiences. In the case of localisation, important dataset differences impacting performance are modes of appearance change, including weather, lighting, and season. Specifically, for any deep architecture which is used for place recognition by matching feature volumes at a particular layer, we use distribution measures to compare neuron-wise activation statistics between live images and multiple previously recorded past experiences, with a potentially large seasonal (winter/summer) or time of day (day/night) shift. We find that differences in these statistics correlate to performance when localising using a past experience with the same appearance gap. We validate our approach over the Nordland cross-season dataset as well as data from Oxford's University Parks with lighting and mild seasonal change, showing excellent ability of our system to rank actual localisation performance across candidate experiences.
Visual DNA: Representing and Comparing Images using Distributions of Neuron Activations
Apr 20, 2023



Selecting appropriate datasets is critical in modern computer vision. However, no general-purpose tools exist to evaluate the extent to which two datasets differ. For this, we propose representing images - and by extension datasets - using Distributions of Neuron Activations (DNAs). DNAs fit distributions, such as histograms or Gaussians, to activations of neurons in a pre-trained feature extractor through which we pass the image(s) to represent. This extractor is frozen for all datasets, and we rely on its generally expressive power in feature space. By comparing two DNAs, we can evaluate the extent to which two datasets differ with granular control over the comparison attributes of interest, providing the ability to customise the way distances are measured to suit the requirements of the task at hand. Furthermore, DNAs are compact, representing datasets of any size with less than 15 megabytes. We demonstrate the value of DNAs by evaluating their applicability on several tasks, including conditional dataset comparison, synthetic image evaluation, and transfer learning, and across diverse datasets, ranging from synthetic cat images to celebrity faces and urban driving scenes.
Towards Collaborative Simultaneous Localization and Mapping: a Survey of the Current Research Landscape
Aug 18, 2021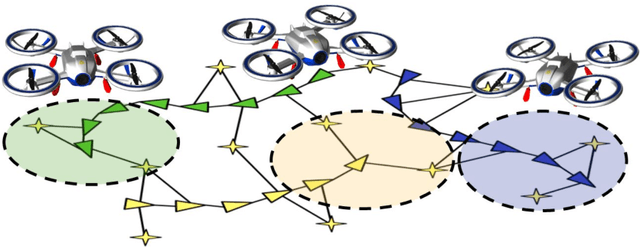
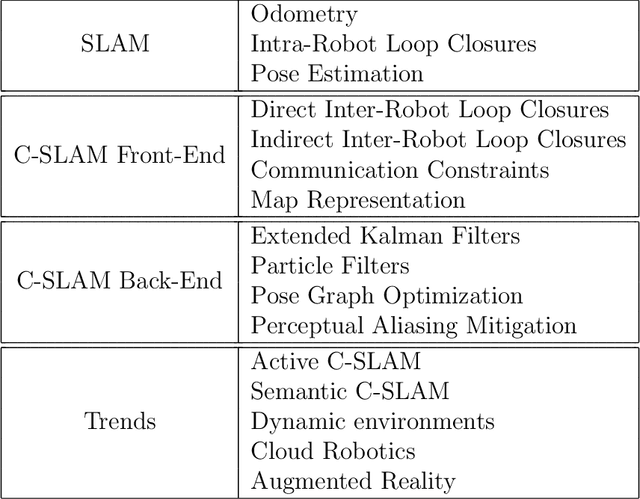

Motivated by the tremendous progress we witnessed in recent years, this paper presents a survey of the scientific literature on the topic of Collaborative Simultaneous Localization and Mapping (C-SLAM), also known as multi-robot SLAM. With fleets of self-driving cars on the horizon and the rise of multi-robot systems in industrial applications, we believe that Collaborative SLAM will soon become a cornerstone of future robotic applications. In this survey, we introduce the basic concepts of C-SLAM and present a thorough literature review. We also outline the major challenges and limitations of C-SLAM in terms of robustness, communication, and resource management. We conclude by exploring the area's current trends and promising research avenues.
NeBula: Quest for Robotic Autonomy in Challenging Environments; TEAM CoSTAR at the DARPA Subterranean Challenge
Mar 28, 2021



This paper presents and discusses algorithms, hardware, and software architecture developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), competing in the DARPA Subterranean Challenge. Specifically, it presents the techniques utilized within the Tunnel (2019) and Urban (2020) competitions, where CoSTAR achieved 2nd and 1st place, respectively. We also discuss CoSTAR's demonstrations in Martian-analog surface and subsurface (lava tubes) exploration. The paper introduces our autonomy solution, referred to as NeBula (Networked Belief-aware Perceptual Autonomy). NeBula is an uncertainty-aware framework that aims at enabling resilient and modular autonomy solutions by performing reasoning and decision making in the belief space (space of probability distributions over the robot and world states). We discuss various components of the NeBula framework, including: (i) geometric and semantic environment mapping; (ii) a multi-modal positioning system; (iii) traversability analysis and local planning; (iv) global motion planning and exploration behavior; (i) risk-aware mission planning; (vi) networking and decentralized reasoning; and (vii) learning-enabled adaptation. We discuss the performance of NeBula on several robot types (e.g. wheeled, legged, flying), in various environments. We discuss the specific results and lessons learned from fielding this solution in the challenging courses of the DARPA Subterranean Challenge competition.
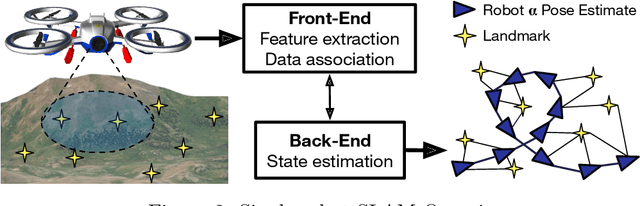
MSL-RAPTOR: A 6DoF Relative Pose Tracker for Onboard Robotic Perception
Dec 16, 2020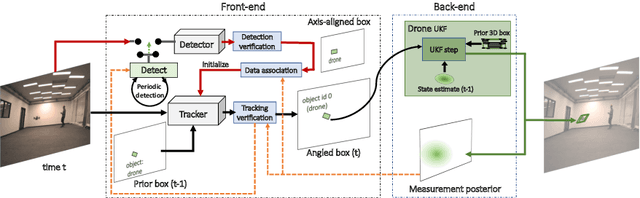
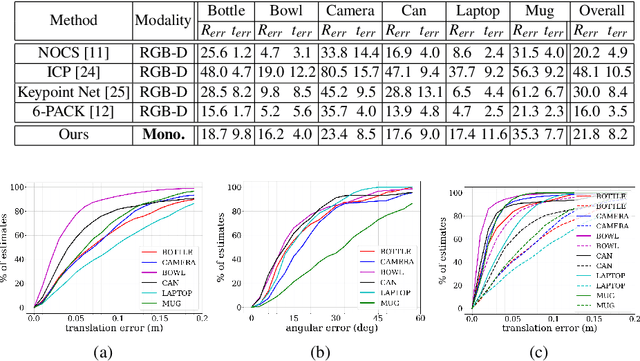
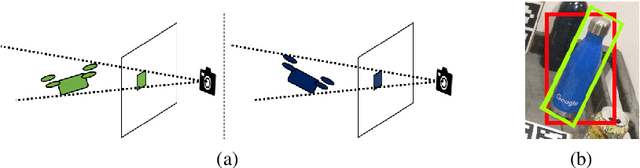
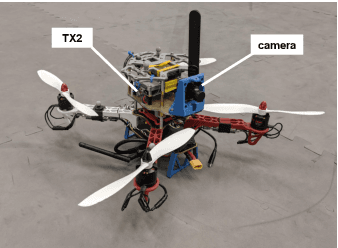
Determining the relative position and orientation of objects in an environment is a fundamental building block for a wide range of robotics applications. To accomplish this task efficiently in practical settings, a method must be fast, use common sensors, and generalize easily to new objects and environments. We present MSL-RAPTOR, a two-stage algorithm for tracking a rigid body with a monocular camera. The image is first processed by an efficient neural network-based front-end to detect new objects and track 2D bounding boxes between frames. The class label and bounding box is passed to the back-end that updates the object's pose using an unscented Kalman filter (UKF). The measurement posterior is fed back to the 2D tracker to improve robustness. The object's class is identified so a class-specific UKF can be used if custom dynamics and constraints are known. Adapting to track the pose of new classes only requires providing a trained 2D object detector or labeled 2D bounding box data, as well as the approximate size of the objects. The performance of MSL-RAPTOR is first verified on the NOCS-REAL275 dataset, achieving results comparable to RGB-D approaches despite not using depth measurements. When tracking a flying drone from onboard another drone, it outperforms the fastest comparable method in speed by a factor of 3, while giving lower translation and rotation median errors by 66% and 23% respectively.
CAPRICORN: Communication Aware Place Recognition using Interpretable Constellations of Objects in Robot Networks
Oct 19, 2019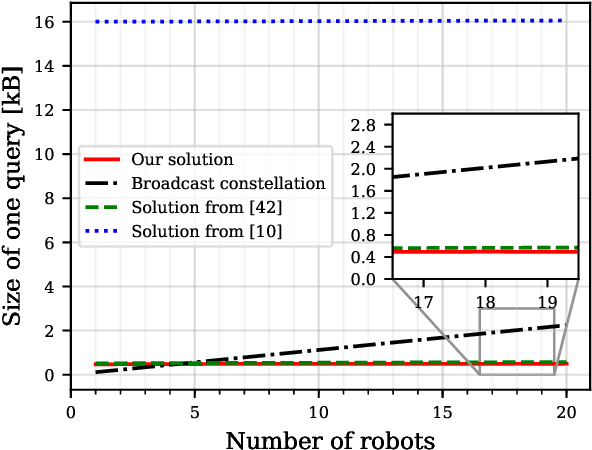
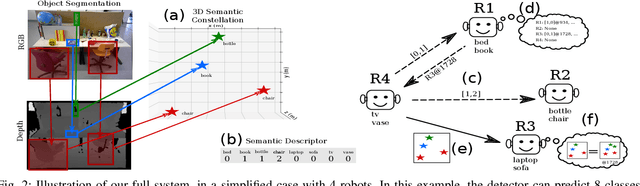
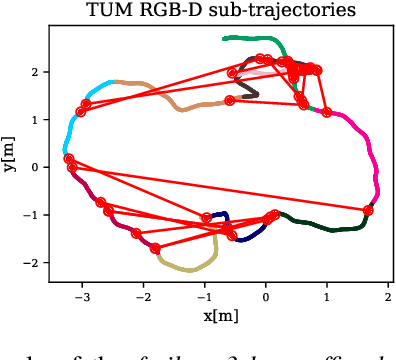
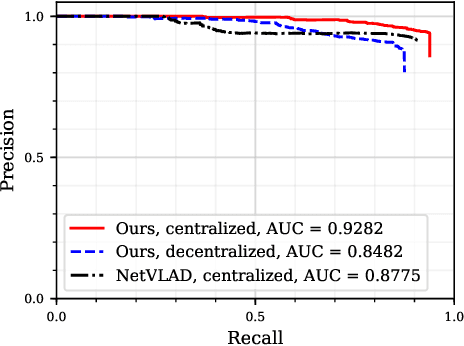
Using multiple robots for exploring and mapping environments can provide improved robustness and performance, but it can be difficult to implement. In particular, limited communication bandwidth is a considerable constraint when a robot needs to determine if it has visited a location that was previously explored by another robot, as it requires for robots to share descriptions of places they have visited. One way to compress this description is to use constellations, groups of 3D points that correspond to the estimate of a set of relative object positions. Constellations maintain the same pattern from different viewpoints and can be robust to illumination changes or dynamic elements. We present a method to extract from these constellations compact spatial and semantic descriptors of the objects in a scene. We use this representation in a 2-step decentralized loop closure verification: first, we distribute the compact semantic descriptors to determine which other robots might have seen scenes with similar objects; then we query matching robots with the full constellation to validate the match using geometric information. The proposed method requires less memory, is more interpretable than global image descriptors, and could be useful for other tasks and interactions with the environment. We validate our system's performance on a TUM RGB-D SLAM sequence and show its benefits in terms of bandwidth requirements.