 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Addendum to NeBula: Towards Extending TEAM CoSTAR's Solution to Larger Scale Environments
Apr 18, 2025This paper presents an appendix to the original NeBula autonomy solution developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), participating in the DARPA Subterranean Challenge. Specifically, this paper presents extensions to NeBula's hardware, software, and algorithmic components that focus on increasing the range and scale of the exploration environment. From the algorithmic perspective, we discuss the following extensions to the original NeBula framework: (i) large-scale geometric and semantic environment mapping; (ii) an adaptive positioning system; (iii) probabilistic traversability analysis and local planning; (iv) large-scale POMDP-based global motion planning and exploration behavior; (v) large-scale networking and decentralized reasoning; (vi) communication-aware mission planning; and (vii) multi-modal ground-aerial exploration solutions. We demonstrate the application and deployment of the presented systems and solutions in various large-scale underground environments, including limestone mine exploration scenarios as well as deployment in the DARPA Subterranean challenge.
Icy Moon Surface Simulation and Stereo Depth Estimation for Sampling Autonomy
Jan 23, 2024Sampling autonomy for icy moon lander missions requires understanding of topographic and photometric properties of the sampling terrain. Unavailability of high resolution visual datasets (either bird-eye view or point-of-view from a lander) is an obstacle for selection, verification or development of perception systems. We attempt to alleviate this problem by: 1) proposing Graphical Utility for Icy moon Surface Simulations (GUISS) framework, for versatile stereo dataset generation that spans the spectrum of bulk photometric properties, and 2) focusing on a stereo-based visual perception system and evaluating both traditional and deep learning-based algorithms for depth estimation from stereo matching. The surface reflectance properties of icy moon terrains (Enceladus and Europa) are inferred from multispectral datasets of previous missions. With procedural terrain generation and physically valid illumination sources, our framework can fit a wide range of hypotheses with respect to visual representations of icy moon terrains. This is followed by a study over the performance of stereo matching algorithms under different visual hypotheses. Finally, we emphasize the standing challenges to be addressed for simulating perception data assets for icy moons such as Enceladus and Europa. Our code can be found here: https://github.com/nasa-jpl/guiss.
Exploring Event Camera-based Odometry for Planetary Robots
Apr 12, 2022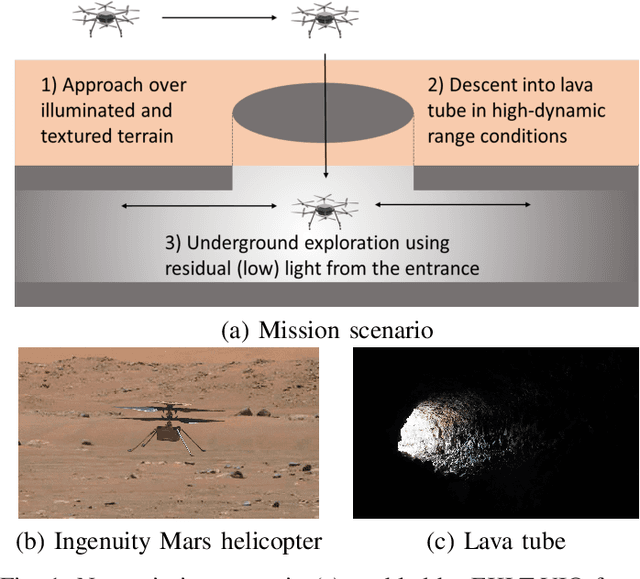
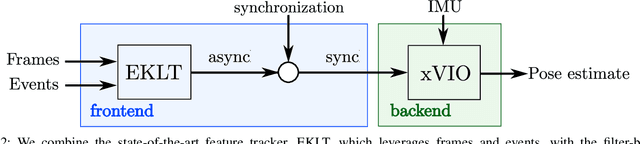
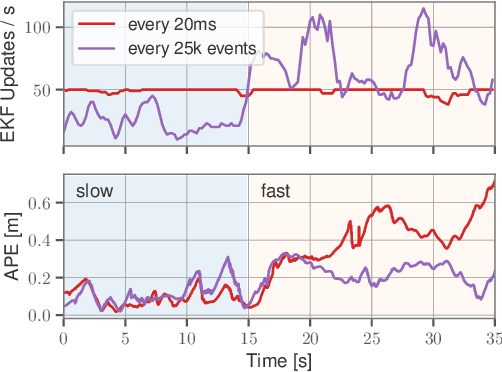
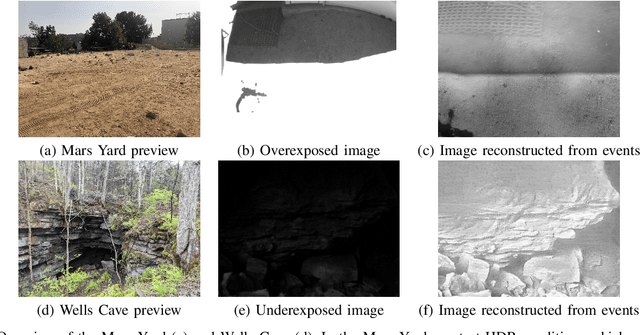
Due to their resilience to motion blur and high robustness in low-light and high dynamic range conditions, event cameras are poised to become enabling sensors for vision-based exploration on future Mars helicopter missions. However, existing event-based visual-inertial odometry (VIO) algorithms either suffer from high tracking errors or are brittle, since they cannot cope with significant depth uncertainties caused by an unforeseen loss of tracking or other effects. In this work, we introduce EKLT-VIO, which addresses both limitations by combining a state-of-the-art event-based frontend with a filter-based backend. This makes it both accurate and robust to uncertainties, outperforming event- and frame-based VIO algorithms on challenging benchmarks by 32%. In addition, we demonstrate accurate performance in hover-like conditions (outperforming existing event-based methods) as well as high robustness in newly collected Mars-like and high-dynamic-range sequences, where existing frame-based methods fail. In doing so, we show that event-based VIO is the way forward for vision-based exploration on Mars.
NeBula: Quest for Robotic Autonomy in Challenging Environments; TEAM CoSTAR at the DARPA Subterranean Challenge
Mar 28, 2021



This paper presents and discusses algorithms, hardware, and software architecture developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), competing in the DARPA Subterranean Challenge. Specifically, it presents the techniques utilized within the Tunnel (2019) and Urban (2020) competitions, where CoSTAR achieved 2nd and 1st place, respectively. We also discuss CoSTAR's demonstrations in Martian-analog surface and subsurface (lava tubes) exploration. The paper introduces our autonomy solution, referred to as NeBula (Networked Belief-aware Perceptual Autonomy). NeBula is an uncertainty-aware framework that aims at enabling resilient and modular autonomy solutions by performing reasoning and decision making in the belief space (space of probability distributions over the robot and world states). We discuss various components of the NeBula framework, including: (i) geometric and semantic environment mapping; (ii) a multi-modal positioning system; (iii) traversability analysis and local planning; (iv) global motion planning and exploration behavior; (i) risk-aware mission planning; (vi) networking and decentralized reasoning; and (vii) learning-enabled adaptation. We discuss the performance of NeBula on several robot types (e.g. wheeled, legged, flying), in various environments. We discuss the specific results and lessons learned from fielding this solution in the challenging courses of the DARPA Subterranean Challenge competition.
Improving Visual Feature Extraction in Glacial Environments
Aug 27, 2019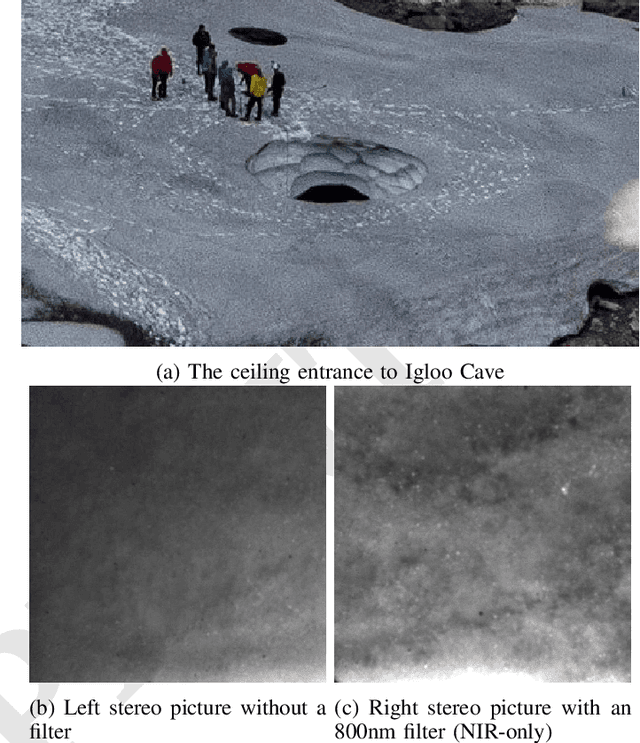
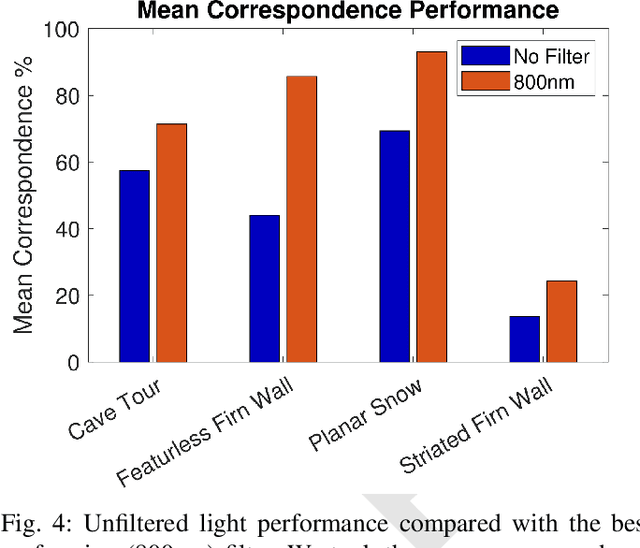
Glacial science could benefit tremendously from autonomous robots, but previous glacial robots have had perception issues in these colorless and featureless environments, specifically with visual feature extraction. Glaciologists use near-infrared imagery to reveal the underlying heterogeneous spatial structure of snow and ice, and we theorize that this hidden near-infrared structure could produce more and higher quality features than available in visible light. We took a custom camera rig to Igloo Cave at Mt. St. Helens to test our theory. The camera rig contains two identical machine vision cameras, one which was outfitted with multiple filters to see only near-infrared light. We extracted features from short video clips taken inside Igloo Cave at Mt. St. Helens, using three popular feature extractors (FAST, SIFT, and SURF). We quantified the number of features and their quality for visual navigation using feature correspondence and the epipolar constraint. Our results indicate that near-infrared imagery produces more features that tend to be of higher quality than that of visible light imagery.