 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient volumetric mapping of multi-scale environments using wavelet-based compression
Jun 02, 2023



Volumetric maps are widely used in robotics due to their desirable properties in applications such as path planning, exploration, and manipulation. Constant advances in mapping technologies are needed to keep up with the improvements in sensor technology, generating increasingly vast amounts of precise measurements. Handling this data in a computationally and memory-efficient manner is paramount to representing the environment at the desired scales and resolutions. In this work, we express the desirable properties of a volumetric mapping framework through the lens of multi-resolution analysis. This shows that wavelets are a natural foundation for hierarchical and multi-resolution volumetric mapping. Based on this insight we design an efficient mapping system that uses wavelet decomposition. The efficiency of the system enables the use of uncertainty-aware sensor models, improving the quality of the maps. Experiments on both synthetic and real-world data provide mapping accuracy and runtime performance comparisons with state-of-the-art methods on both RGB-D and 3D LiDAR data. The framework is open-sourced to allow the robotics community at large to explore this approach.
Design and Control of a Micro Overactuated Aerial Robot with an Origami Delta Manipulator
May 03, 2023



This work presents the mechanical design and control of a novel small-size and lightweight Micro Aerial Vehicle (MAV) for aerial manipulation. To our knowledge, with a total take-off mass of only 2.0 kg, the proposed system is the most lightweight Aerial Manipulator (AM) that has 8-DOF independently controllable: 5 for the aerial platform and 3 for the articulated arm. We designed the robot to be fully-actuated in the body forward direction. This allows independent pitching and instantaneous force generation, improving the platform's performance during physical interaction. The robotic arm is an origami delta manipulator driven by three servomotors, enabling active motion compensation at the end-effector. Its composite multimaterial links help reduce the weight, while their flexibility allow for compliant aerial interaction with the environment. In particular, the arm's stiffness can be changed according to its configuration. We provide an in depth discussion of the system design and characterize the stiffness of the delta arm. A control architecture to deal with the platform's overactuation while exploiting the delta arm is presented. Its capabilities are experimentally illustrated both in free flight and physical interaction, highlighting advantages and disadvantages of the origami's folding mechanism.
A Comparison of Pneumatic Actuators for Soft Growing Vine Robots
May 01, 2023



Soft pneumatic actuators are used to steer soft growing "vine" robots while being flexible enough to undergo the tip eversion required for growth. They also meet the requirements to steer soft growing vine robots through challenging terrain. In this study, we compared the performance of three types of pneumatic actuators in terms of their ability to perform eversion, bending, dynamic motion, and force: the pouch motor, the cylindrical pneumatic artificial muscle (cPAM), and the fabric pneumatic artificial muscle (fPAM). The pouch motor is advantageous for prototyping due to its simple manufacturing process. The cPAM exhibits superior bending behavior and produces the highest forces, while the fPAM actuates fastest and everts at the lowest pressure. We evaluated a similar range of dimensions for each actuator type. Larger actuators can produce more significant deformations and forces, but smaller actuators inflate more quickly and require a lower eversion pressure. Since vine robots are lightweight, the effect of gravity on the functionality of different actuators is minimal. We developed a new analytical model that predicts the pressure-to-bending behavior of vine robot actuators. Using the actuator results, we designed and demonstrated a 4.8 m long vine robot equipped with highly maneuverable 60x60 mm cPAMs in a three-dimensional obstacle course. The vine robot was able to move around sharp turns, travel through a passage smaller than its diameter, and lift itself against gravity.
Dynablox: Real-time Detection of Diverse Dynamic Objects in Complex Environments
Apr 21, 2023



Real-time detection of moving objects is an essential capability for robots acting autonomously in dynamic environments. We thus propose Dynablox, a novel online mapping-based approach for robust moving object detection in complex environments. The central idea of our approach is to incrementally estimate high confidence free-space areas by modeling and accounting for sensing, state estimation, and mapping limitations during online robot operation. The spatio-temporally conservative free space estimate enables robust detection of moving objects without making any assumptions on the appearance of objects or environments. This allows deployment in complex scenes such as multi-storied buildings or staircases, and for diverse moving objects such as people carrying various items, doors swinging or even balls rolling around. We thoroughly evaluate our approach on real-world data sets, achieving 86% IoU at 17 FPS in typical robotic settings. The method outperforms a recent appearance-based classifier and approaches the performance of offline methods. We demonstrate its generality on a novel data set with rare moving objects in complex environments. We make our efficient implementation and the novel data set available as open-source.
Material-agnostic Shaping of Granular Materials with Optimal Transport
Mar 29, 2023



From construction materials, such as sand or asphalt, to kitchen ingredients, like rice, sugar, or salt; the world is full of granular materials. Despite impressive progress in robotic manipulation, manipulating and interacting with granular material remains a challenge due to difficulties in perceiving, representing, modelling, and planning for these variable materials that have complex internal dynamics. While some prior work has looked into estimating or learning accurate dynamics models for granular materials, the literature is still missing a more abstract planning method that can be used for planning manipulation actions for granular materials with unknown material properties. In this work, we leverage tools from optimal transport and connect them to robot motion planning. We propose a heuristics-based sweep planner that does not require knowledge of the material's properties and directly uses a height map representation to generate promising sweeps. These sweeps transform granular material from arbitrary start shapes into arbitrary target shapes. We apply the sweep planner in a fast and reactive feedback loop and avoid the need for model-based planning over multiple time steps. We validate our approach with a large set of simulation and hardware experiments where we show that our method is capable of efficiently solving several complex tasks, including gathering, separating, and shaping of several types of granular materials into different target shapes.
Neural Implicit Vision-Language Feature Fields
Mar 20, 2023



Recently, groundbreaking results have been presented on open-vocabulary semantic image segmentation. Such methods segment each pixel in an image into arbitrary categories provided at run-time in the form of text prompts, as opposed to a fixed set of classes defined at training time. In this work, we present a zero-shot volumetric open-vocabulary semantic scene segmentation method. Our method builds on the insight that we can fuse image features from a vision-language model into a neural implicit representation. We show that the resulting feature field can be segmented into different classes by assigning points to natural language text prompts. The implicit volumetric representation enables us to segment the scene both in 3D and 2D by rendering feature maps from any given viewpoint of the scene. We show that our method works on noisy real-world data and can run in real-time on live sensor data dynamically adjusting to text prompts. We also present quantitative comparisons on the ScanNet dataset.
Chasing Millimeters: Design, Navigation and State Estimation for Precise In-flight Marking on Ceilings
Mar 02, 2023Precise markings for drilling and assembly are crucial, laborious construction tasks. Aerial robots with suitable end-effectors are capable of markings at the millimeter scale. However, so far, they have only been demonstrated under laboratory conditions where rigid state estimation and navigation assumptions do not impede robustness and accuracy. This paper presents a complete aerial layouting system capable of precise markings on-site under realistic conditions. We use a compliant actuated end-effector on an omnidirectional flying base. Combining a two-stage factor-graph state estimator with a Riemannian Motion Policy-based navigation stack, we avoid the need for a globally consistent estimate and increase robustness. The policy-based navigation is structured into individual behaviors in different state spaces. Through a comprehensive study, we show that the system creates highly precise markings at a relative precision of 1.5 mm and a global accuracy of 5-6 mm and discuss the results in the context of future construction robotics.
Multi-Agent Path Integral Control for Interaction-Aware Motion Planning in Urban Canals
Feb 13, 2023



Autonomous vehicles that operate in urban environments shall comply with existing rules and reason about the interactions with other decision-making agents. In this paper, we introduce a decentralized and communication-free interaction-aware motion planner and apply it to Autonomous Surface Vessels (ASVs) in urban canals. We build upon a sampling-based method, namely Model Predictive Path Integral control (MPPI), and employ it to, in each time instance, compute both a collision-free trajectory for the vehicle and a prediction of other agents' trajectories, thus modeling interactions. To improve the method's efficiency in multi-agent scenarios, we introduce a two-stage sample evaluation strategy and define an appropriate cost function to achieve rule compliance. We evaluate this decentralized approach in simulations with multiple vessels in real scenarios extracted from Amsterdam's canals, showing superior performance than a state-of-the-art trajectory optimization framework and robustness when encountering different types of agents.
Obstacle avoidance using raycasting and Riemannian Motion Policies at kHz rates for MAVs
Jan 19, 2023



In this paper, we present a novel method for using Riemannian Motion Policies on volumetric maps, shown in the example of obstacle avoidance for Micro Aerial Vehicles (MAVs). While sampling or optimization-based planners are widely used for obstacle avoidance with volumetric maps, they are computationally expensive and often have inflexible monolithic architectures. Riemannian Motion Policies are a modular, parallelizable, and efficient navigation paradigm but are challenging to use with the widely used voxel-based environment representations. We propose using GPU raycasting and a large number of concurrent policies to provide direct obstacle avoidance using Riemannian Motion Policies in voxelized maps without the need for smoothing or pre-processing of the map. Additionally, we present how the same method can directly plan on LiDAR scans without the need for an intermediate map. We show how this reactive approach compares favorably to traditional planning methods and is able to plan using thousands of rays at kilohertz rates. We demonstrate the planner successfully on a real MAV for static and dynamic obstacles. The presented planner is made available as an open-source software package.
Resilient Terrain Navigation with a 5 DOF Metal Detector Drone
Dec 15, 2022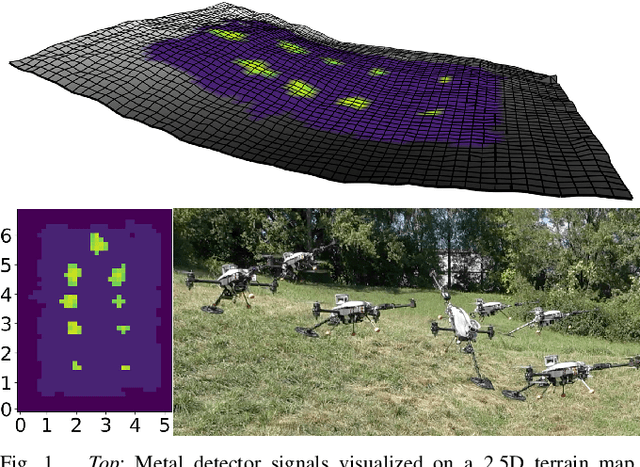



Micro aerial vehicles (MAVs) hold the potential for performing autonomous and contactless land surveys for the detection of landmines and explosive remnants of war (ERW). Metal detectors are the standard tool, but have to be operated close to and parallel to the terrain. As this requires advanced flight capabilities, they have not been successfully combined with MAVs before. To this end, we present a full system to autonomously survey challenging undulated terrain using a metal detector mounted on a 5 degrees of freedom (DOF) MAV. Based on an online estimate of the terrain, our receding-horizon planner efficiently covers the area, aligning the detector to the surface while considering the kinematic and visibility constraints of the platform. For resilient localization, we propose a factor-graph approach for online fusion of GNSS, IMU and LiDAR measurements. A simulated ablation study shows that the proposed planner reduces coverage duration and improves trajectory smoothness. Real-world flight experiments showcase autonomous mapping of buried metallic objects in undulated and obstructed terrain. The proposed localization approach is resilient to individual sensor degeneracy.