 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAssociation-Based Track-Before-Detect with Object Contribution Probabilities
Apr 23, 2025Multiobject tracking provides situational awareness that enables new applications for modern convenience, applied ocean sciences, public safety, and homeland security. In many multiobject tracking applications, including radar and sonar tracking, after coherent prefiltering of the received signal, measurement data is typically structured in cells, where each cell represent, e.g., a different range and bearing value. While conventional detect-then-track (DTT) multiobject tracking approaches convert the cell-structured data within a detection phase into so-called point measurements in order to reduce the amount of data, track-before-detect (TBD) methods process the cell-structured data directly, avoiding a potential information loss. However, many TBD tracking methods are computationally intensive and achieve a reduced tracking accuracy when objects interact, i.e., when they come into close proximity. We here counteract these difficulties by introducing the concept of probabilistic object-to-cell contributions. As many conventional DTT methods, our approach uses a probabilistic association of objects with data cells, and a new object contribution model with corresponding object contribution probabilities to further associate cell contributions to objects that occupy the same data cell. Furthermore, to keep the computational complexity and filter runtimes low, we here use an efficient Poisson multi-Bernoulli filtering approach in combination with the application of belief propagation for fast probabilistic data association. We demonstrate numerically that our method achieves significantly increased tracking performance compared to state-of-the-art TBD tracking approaches, where performance differences are particularly pronounced when multiple objects interact.
Multiobject Tracking for Thresholded Cell Measurements
Mar 11, 2024In many multiobject tracking applications, including radar and sonar tracking, after prefiltering the received signal, measurement data is typically structured in cells. The cells, e.g., represent different range and bearing values. However, conventional multiobject tracking methods use so-called point measurements. Point measurements are provided by a preprocessing stage that applies a threshold or detector and breaks up the cell's structure by converting cell indexes into, e.g., range and bearing measurements. We here propose a Bayesian multiobject tracking method that processes measurements that have been thresholded but are still cell-structured. We first derive a likelihood function that systematically incorporates an adjustable detection threshold which makes it possible to control the number of cell measurements. We then propose a Poisson Multi-Bernoulli (PMB) filter based on the likelihood function for cell measurements. Furthermore, we establish a link to the conventional point measurement model by deriving the likelihood function for point measurements with amplitude information (AM) and discuss the PMB filter that uses point measurements with AM. Our numerical results demonstrate the advantages of the proposed method that relies on thresholded cell measurements compared to the conventional multiobject tracking based on point measurements with and without AM.
Present and Future of SLAM in Extreme Underground Environments
Aug 02, 2022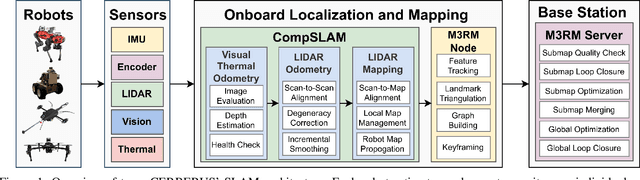
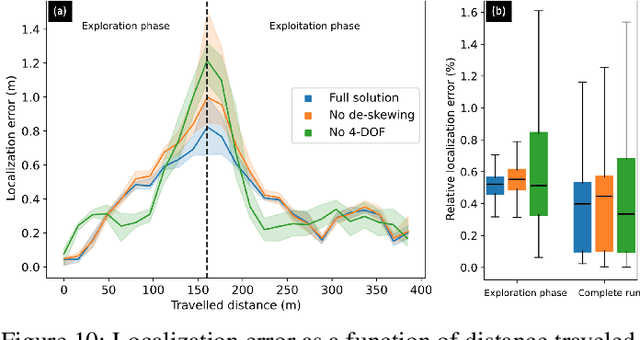
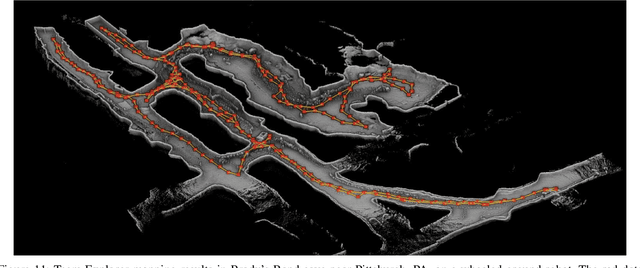
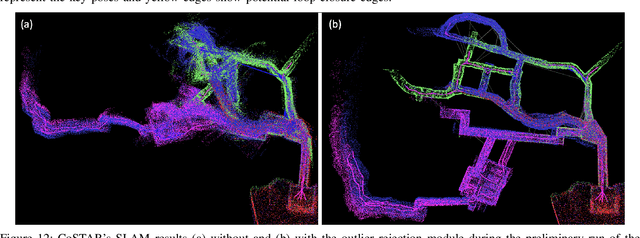
This paper reports on the state of the art in underground SLAM by discussing different SLAM strategies and results across six teams that participated in the three-year-long SubT competition. In particular, the paper has four main goals. First, we review the algorithms, architectures, and systems adopted by the teams; particular emphasis is put on lidar-centric SLAM solutions (the go-to approach for virtually all teams in the competition), heterogeneous multi-robot operation (including both aerial and ground robots), and real-world underground operation (from the presence of obscurants to the need to handle tight computational constraints). We do not shy away from discussing the dirty details behind the different SubT SLAM systems, which are often omitted from technical papers. Second, we discuss the maturity of the field by highlighting what is possible with the current SLAM systems and what we believe is within reach with some good systems engineering. Third, we outline what we believe are fundamental open problems, that are likely to require further research to break through. Finally, we provide a list of open-source SLAM implementations and datasets that have been produced during the SubT challenge and related efforts, and constitute a useful resource for researchers and practitioners.
Trajectory PMB Filters for Extended Object Tracking Using Belief Propagation
Jul 20, 2022

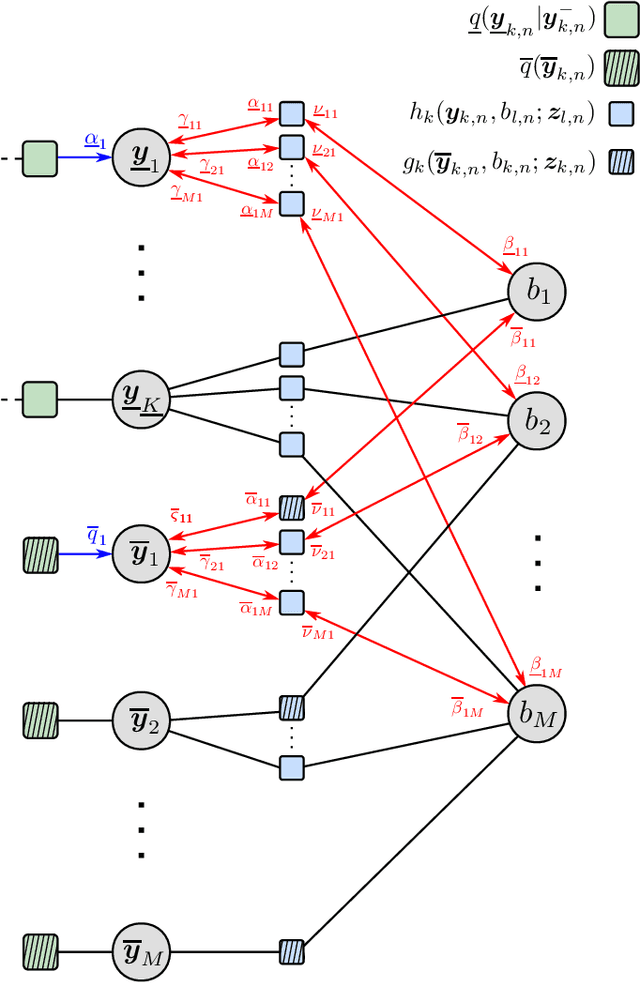
In this paper, we propose a Poisson multi-Bernoulli (PMB) filter for extended object tracking (EOT), which directly estimates the set of object trajectories, using belief propagation (BP). The proposed filter propagates a PMB density on the posterior of sets of trajectories through the filtering recursions over time, where the PMB mixture (PMBM) posterior after the update step is approximated as a PMB. The efficient PMB approximation relies on several important theoretical contributions. First, we present a PMBM conjugate prior on the posterior of sets of trajectories for a generalized measurement model, in which each object generates an independent set of measurements. The PMBM density is a conjugate prior in the sense that both the prediction and the update steps preserve the PMBM form of the density. Second, we present a factor graph representation of the joint posterior of the PMBM set of trajectories and association variables for the Poisson spatial measurement model. Importantly, leveraging the PMBM conjugacy and the factor graph formulation enables an elegant treatment on undetected objects via a Poisson point process and efficient inference on sets of trajectories using BP, where the approximate marginal densities in the PMB approximation can be obtained without enumeration of different data association hypotheses. To achieve this, we present a particle-based implementation of the proposed filter, where smoothed trajectory estimates, if desired, can be obtained via single-object particle smoothing methods, and its performance for EOT with ellipsoidal shapes is evaluated in a simulation study.
Multiple Object Trajectory Estimation Using Backward Simulation
Jun 16, 2022
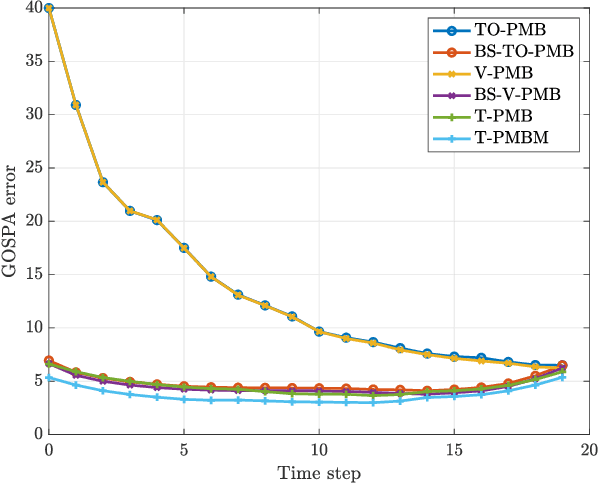

This paper presents a general solution for computing the multi-object posterior for sets of trajectories from a sequence of multi-object (unlabelled) filtering densities and a multi-object dynamic model. Importantly, the proposed solution opens an avenue of trajectory estimation possibilities for multi-object filters that do not explicitly estimate trajectories. In this paper, we first derive a general multi-trajectory backward smoothing equation based on random finite sets of trajectories. Then we show how to sample sets of trajectories using backward simulation for Poisson multi-Bernoulli filtering densities, and develop a tractable implementation based on ranked assignment. The performance of the resulting multi-trajectory particle smoothers is evaluated in a simulation study, and the results demonstrate that they have superior performance in comparison to several state-of-the-art multi-object filters and smoothers.
A Scalable Track-Before-Detect Method With Poisson/Multi-Bernoulli Model
Sep 03, 2021
We propose a scalable track-before-detect (TBD) tracking method based on a Poisson/multi-Bernoulli model. To limit computational complexity, we approximate the exact multi-Bernoulli mixture posterior probability density function (pdf) by a multi-Bernoulli pdf. Data association based on the sum-product algorithm and recycling of Bernoulli components enable the detection and tracking of low-observable objects with limited computational resources. Our simulation results demonstrate a significantly improved tracking performance compared to a state-of-the-art TBD method.
Scalable Extended Object Tracking
Mar 21, 2021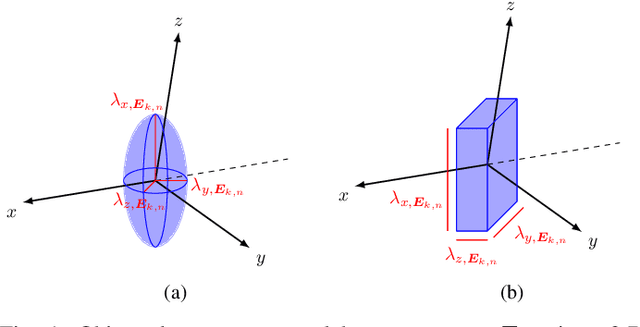
This paper presents a factor graph formulation and particle-based sum-product algorithm (SPA) for scalable detection and tracking of extended objects. The proposed method efficiently performs probabilistic multiple-measurement to object association, represents object extents by random matrices, and introduces the states of newly detected objects dynamically. Scalable detection and tracking of objects is enabled by modeling association uncertainty by measurement-oriented association variables and newly detected objects by a Poisson birth process. Contrary to conventional extended object tracking (EOT) methods with random-matrix models, a fully particle-based approach makes it possible to represent the object extent by different geometric shapes. The proposed method can reliably determine the existence and track a large number of closely-spaced extended objects without gating and clustering of measurements. We demonstrate significant performance advantages of our method compared to the recently proposed Poisson multi-Bernoulli mixture filter in a challenging tracking scenario with ten closely-spaced extended objects.
A Poisson multi-Bernoulli mixture filter for coexisting point and extended targets
Nov 09, 2020


This paper proposes a Poisson multi-Bernoulli mixture (PMBM) filter for coexisting point and extended targets. The PMBM filter provides a recursion to compute the filtering posterior based on single-target predictions and updates. In this paper, we first derive the PMBM filter update for a generalised measurement model, which can include measurements originated from point and extended targets. Second, we propose a single-target space that accommodates both point and extended targets and derive the filtering recursion that propagates Gaussian densities for single targets and gamma Gaussian inverse Wishart densities for extended targets. As a computationally efficient approximation of the PMBM filter, we also develop a Poisson multi-Bernoulli (PMB) filter for coexisting point and extended targets. The resulting filters are analysed via numerical simulations.
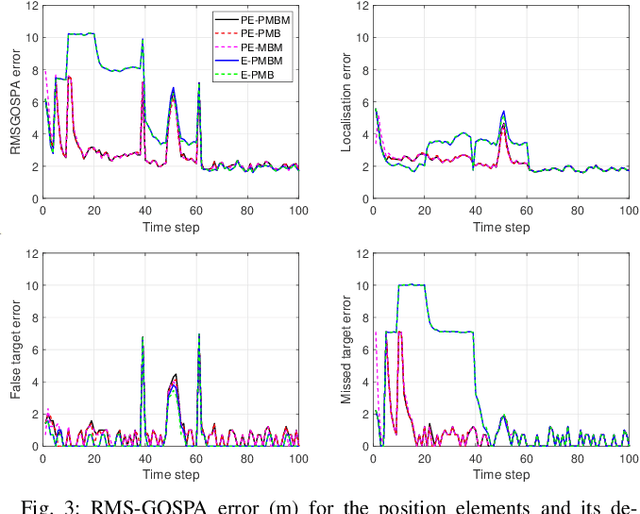
Trajectory Poisson multi-Bernoulli filters
Mar 28, 2020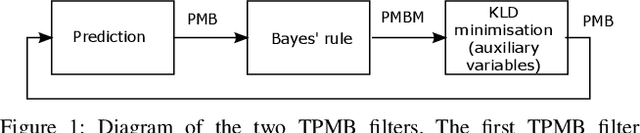
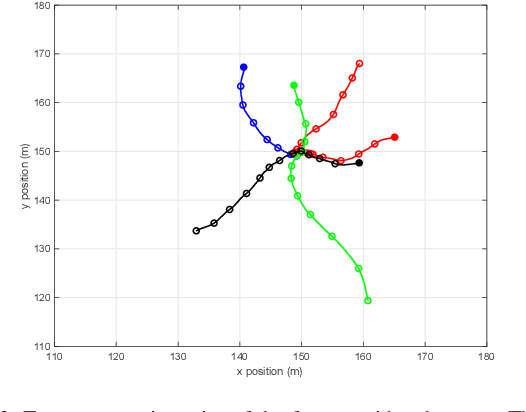
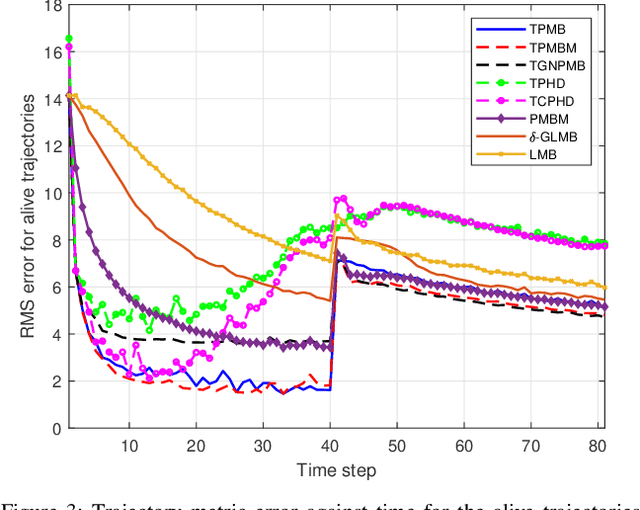
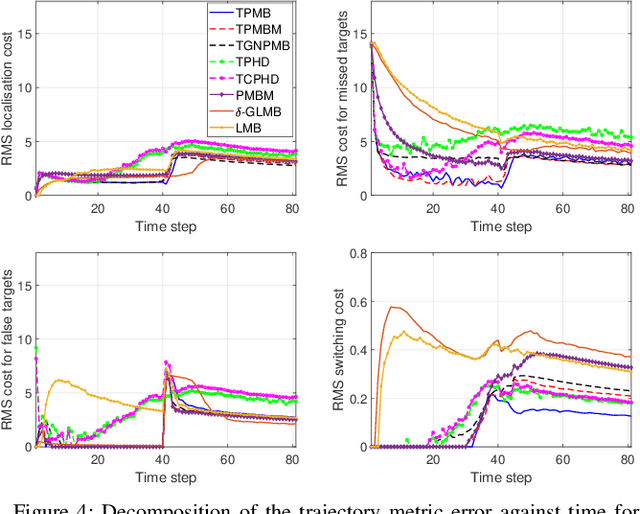
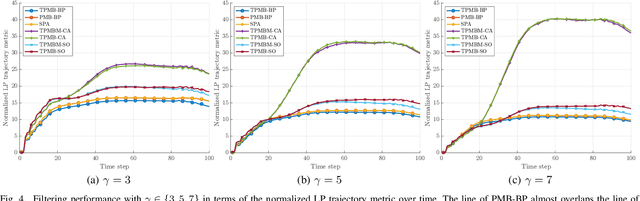
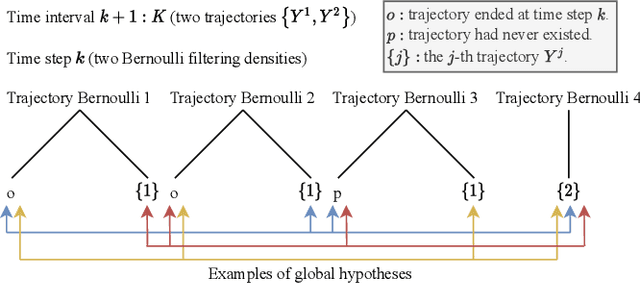
This paper presents two trajectory Poisson multi-Bernoulli (TPMB) filters for multi-target tracking: one to estimate the set of alive trajectories at each time step and another to estimate the set of all trajectories, which includes alive and dead trajectories, at each time step. The filters are based on propagating a Poisson multi-Bernoulli (PMB) density on the corresponding set of trajectories through the filtering recursion. After the update step, the posterior is a PMB mixture (PMBM) so, in order to obtain a PMB density, a Kullback-Leibler divergence minimisation on an augmented space is performed. The developed filters are computationally lighter alternatives to the trajectory PMBM filters, which provide the closed-form recursion for sets of trajectories with Poisson birth model, and are shown to outperform previous multi-target tracking algorithms.
Gaussian implementation of the multi-Bernoulli mixture filter
Aug 23, 2019
This paper presents the Gaussian implementation of the multi-Bernoulli mixture (MBM) filter. The MBM filter provides the filtering (multi-target) density for the standard dynamic and radar measurement models when the birth model is multi-Bernoulli or multi-Bernoulli mixture. Under linear/Gaussian models, the single target densities of the MBM mixture admit Gaussian closed-form expressions. Murty's algorithm is used to select the global hypotheses with highest weights. The MBM filter is compared with other algorithms in the literature via numerical simulations.
* Matlab code of the MBM and PMBM filters is provided in https://github.com/Agarciafernandez/MTT . Additional information on MTT including PMBM and MBM filters can be found in the online course https://www.youtube.com/channel/UCa2-fpj6AV8T6JK1uTRuFpw