 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLieIPM: Lie Group Interior Point Method for Direct Trajectory Optimization of Rigid Bodies
Jun 09, 2026Designing dynamically feasible trajectories for rigid bodies is a fundamental problem in robotics. While direct methods are widely used, the existing constrained optimizers typically operate in Euclidean space and ignore the manifold structure of rigid body motions. This mismatch may introduce singularities or lead to poorly conditioned optimization problems. To bridge this gap, we develop a structure-aware framework for constrained trajectory optimization directly on matrix Lie groups. Our approach is based on the second-order rigid body models utilizing Lie group structures, which enables efficient Newton-type updates while preserving the underlying geometry. Building on this model, we propose a line-search Lie Group Interior Point Method (LieIPM) to handle constraints on the manifolds. We instantiate the framework for rigid body motion planning using Lie group variational integrators and derive closed-form intrinsic derivatives that exploit group symmetries. The LieIPM preserves the topology of rotation motions by construction and avoids singularities. Numerical results demonstrate superior robustness and faster convergence compared to general-purpose solvers and structure-exploiting optimal control methods.
Agents' Last Exam
Jun 03, 2026Recent AI systems have achieved strong results on a wide range of benchmarks, yet these gains have not translated into economically meaningful deployment across many professional domains. We argue that this gap is largely an evaluation problem: widely used benchmarks lack sustained performance measurement on real and economically valuable workflows. This paper introduces Agents' Last Exam (ALE), a benchmark designed to evaluate AI agents on long-horizon, economically valuable, real-world tasks with verifiable outcomes. Developed in collaboration with 250+ industry experts, ALE covers non-physical industries defined with reference to O*NET / SOC 2018 (the U.S. federal occupational taxonomy). It is organized around a task taxonomy with 55 subfields grouped into 13 industry clusters covering 1K+ tasks. Current results show that the hardest tier remains far from saturated: across mainstream harness and backbone configurations, the average full pass rate is 2.6%. ALE is designed as a living benchmark: its task pool grows continuously as new workflows and industries are onboarded. More broadly, ALE is intended not merely as another leaderboard, but as an instrument for closing the gap between benchmark success and GDP-relevant impact.
Evolving Flying Machines in Minecraft Using Quality Diversity
Feb 01, 2023



Minecraft is a great testbed for human creativity that has inspired the design of various structures and even functioning machines, including flying machines. EvoCraft is an API for programmatically generating structures in Minecraft, but the initial work in this domain was not capable of evolving flying machines. This paper applies fitness-based evolution and quality diversity search in order to evolve flying machines. Although fitness alone can occasionally produce flying machines, thanks in part to a more sophisticated fitness function than was used previously, the quality diversity algorithm MAP-Elites is capable of discovering flying machines much more reliably, at least when an appropriate behavior characterization is used to guide the search for diverse solutions.
Team CERBERUS Wins the DARPA Subterranean Challenge: Technical Overview and Lessons Learned
Jul 11, 2022
This article presents the CERBERUS robotic system-of-systems, which won the DARPA Subterranean Challenge Final Event in 2021. The Subterranean Challenge was organized by DARPA with the vision to facilitate the novel technologies necessary to reliably explore diverse underground environments despite the grueling challenges they present for robotic autonomy. Due to their geometric complexity, degraded perceptual conditions combined with lack of GPS support, austere navigation conditions, and denied communications, subterranean settings render autonomous operations particularly demanding. In response to this challenge, we developed the CERBERUS system which exploits the synergy of legged and flying robots, coupled with robust control especially for overcoming perilous terrain, multi-modal and multi-robot perception for localization and mapping in conditions of sensor degradation, and resilient autonomy through unified exploration path planning and local motion planning that reflects robot-specific limitations. Based on its ability to explore diverse underground environments and its high-level command and control by a single human supervisor, CERBERUS demonstrated efficient exploration, reliable detection of objects of interest, and accurate mapping. In this article, we report results from both the preliminary runs and the final Prize Round of the DARPA Subterranean Challenge, and discuss highlights and challenges faced, alongside lessons learned for the benefit of the community.
CERBERUS: Autonomous Legged and Aerial Robotic Exploration in the Tunnel and Urban Circuits of the DARPA Subterranean Challenge
Jan 18, 2022
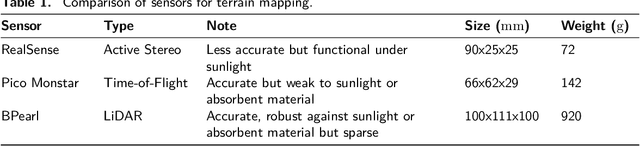
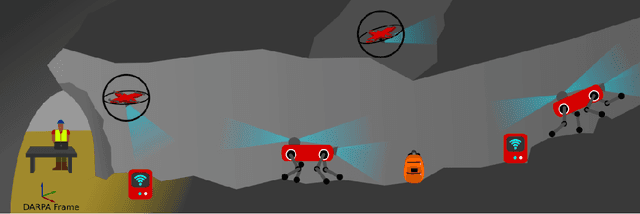

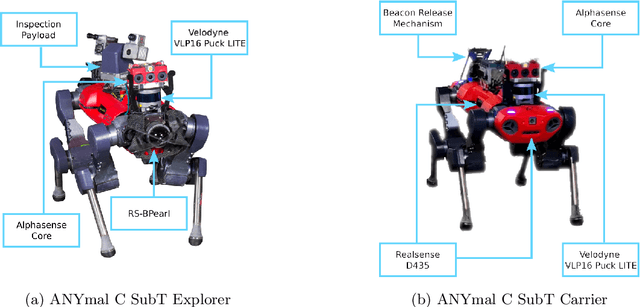
Autonomous exploration of subterranean environments constitutes a major frontier for robotic systems as underground settings present key challenges that can render robot autonomy hard to achieve. This has motivated the DARPA Subterranean Challenge, where teams of robots search for objects of interest in various underground environments. In response, the CERBERUS system-of-systems is presented as a unified strategy towards subterranean exploration using legged and flying robots. As primary robots, ANYmal quadruped systems are deployed considering their endurance and potential to traverse challenging terrain. For aerial robots, both conventional and collision-tolerant multirotors are utilized to explore spaces too narrow or otherwise unreachable by ground systems. Anticipating degraded sensing conditions, a complementary multi-modal sensor fusion approach utilizing camera, LiDAR, and inertial data for resilient robot pose estimation is proposed. Individual robot pose estimates are refined by a centralized multi-robot map optimization approach to improve the reported location accuracy of detected objects of interest in the DARPA-defined coordinate frame. Furthermore, a unified exploration path planning policy is presented to facilitate the autonomous operation of both legged and aerial robots in complex underground networks. Finally, to enable communication between the robots and the base station, CERBERUS utilizes a ground rover with a high-gain antenna and an optical fiber connection to the base station, alongside breadcrumbing of wireless nodes by our legged robots. We report results from the CERBERUS system-of-systems deployment at the DARPA Subterranean Challenge Tunnel and Urban Circuits, along with the current limitations and the lessons learned for the benefit of the community.