 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTraversing Mars: Cooperative Informative Path Planning to Efficiently Navigate Unknown Scenes
Jun 12, 2024



The ability to traverse an unknown environment is crucial for autonomous robot operations. However, due to the limited sensing capabilities and system constraints, approaching this problem with a single robot agent can be slow, costly, and unsafe. For example, in planetary exploration missions, the wear on the wheels of a rover from abrasive terrain should be minimized at all costs as reparations are infeasible. On the other hand, utilizing a scouting robot such as a micro aerial vehicle (MAV) has the potential to reduce wear and time costs and increasing safety of a follower robot. This work proposes a novel cooperative IPP framework that allows a scout (e.g., an MAV) to efficiently explore the minimum-cost-path for a follower (e.g., a rover) to reach the goal. We derive theoretic guarantees for our algorithm, and prove that the algorithm always terminates, always finds the optimal path if it exists, and terminates early when the found path is shown to be optimal or infeasible. We show in thorough experimental evaluation that the guarantees hold in practice, and that our algorithm is 22.5% quicker to find the optimal path and 15% quicker to terminate compared to existing methods.
SCIM: Simultaneous Clustering, Inference, and Mapping for Open-World Semantic Scene Understanding
Jun 21, 2022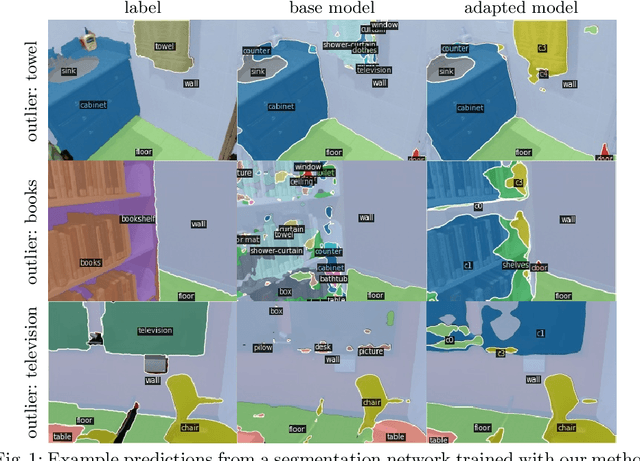
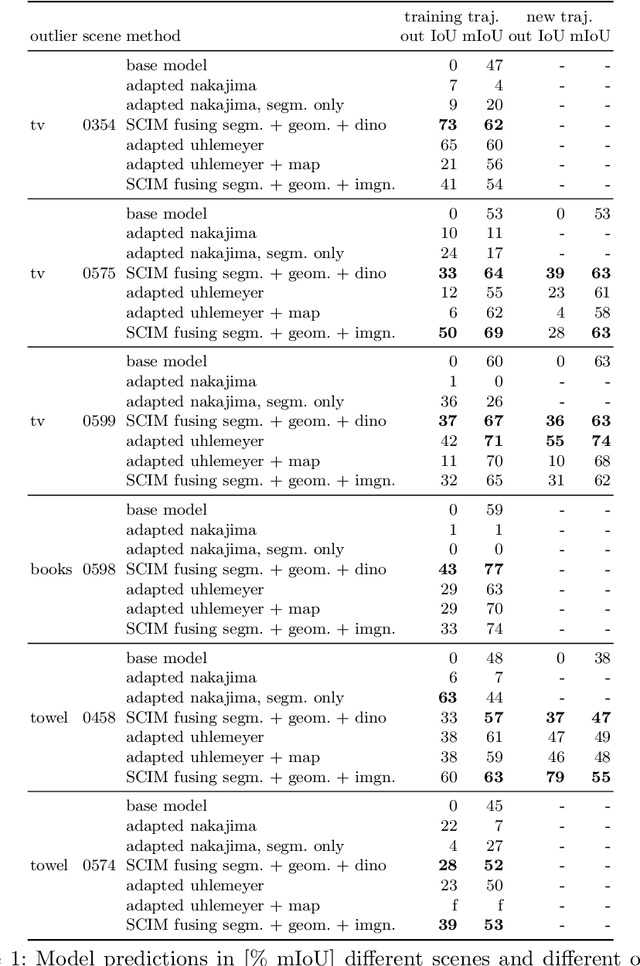
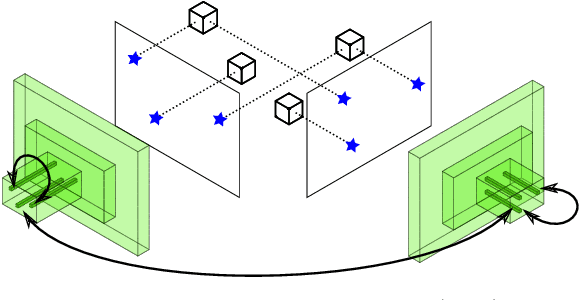
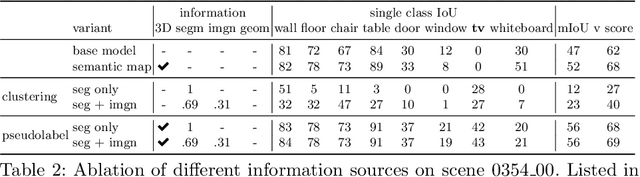
In order to operate in human environments, a robot's semantic perception has to overcome open-world challenges such as novel objects and domain gaps. Autonomous deployment to such environments therefore requires robots to update their knowledge and learn without supervision. We investigate how a robot can autonomously discover novel semantic classes and improve accuracy on known classes when exploring an unknown environment. To this end, we develop a general framework for mapping and clustering that we then use to generate a self-supervised learning signal to update a semantic segmentation model. In particular, we show how clustering parameters can be optimized during deployment and that fusion of multiple observation modalities improves novel object discovery compared to prior work.
Trust Your Robots! Predictive Uncertainty Estimation of Neural Networks with Sparse Gaussian Processes
Sep 21, 2021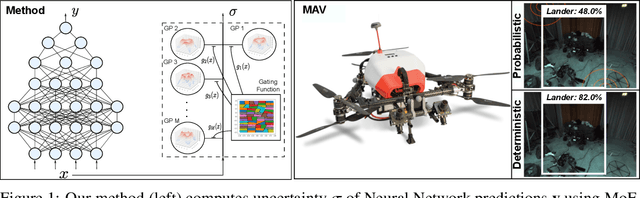
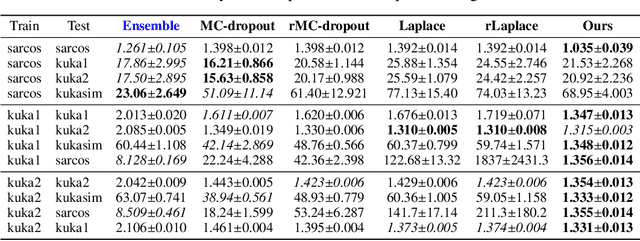
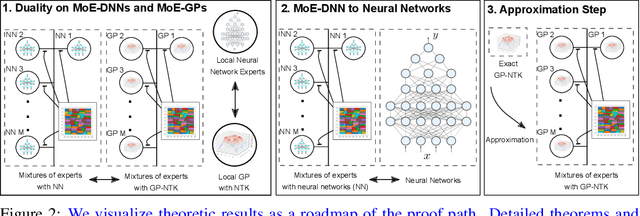
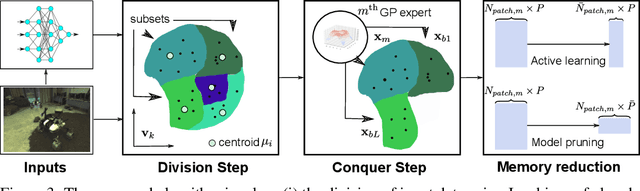
This paper presents a probabilistic framework to obtain both reliable and fast uncertainty estimates for predictions with Deep Neural Networks (DNNs). Our main contribution is a practical and principled combination of DNNs with sparse Gaussian Processes (GPs). We prove theoretically that DNNs can be seen as a special case of sparse GPs, namely mixtures of GP experts (MoE-GP), and we devise a learning algorithm that brings the derived theory into practice. In experiments from two different robotic tasks -- inverse dynamics of a manipulator and object detection on a micro-aerial vehicle (MAV) -- we show the effectiveness of our approach in terms of predictive uncertainty, improved scalability, and run-time efficiency on a Jetson TX2. We thus argue that our approach can pave the way towards reliable and fast robot learning systems with uncertainty awareness.
Towards Robust Monocular Visual Odometry for Flying Robots on Planetary Missions
Sep 12, 2021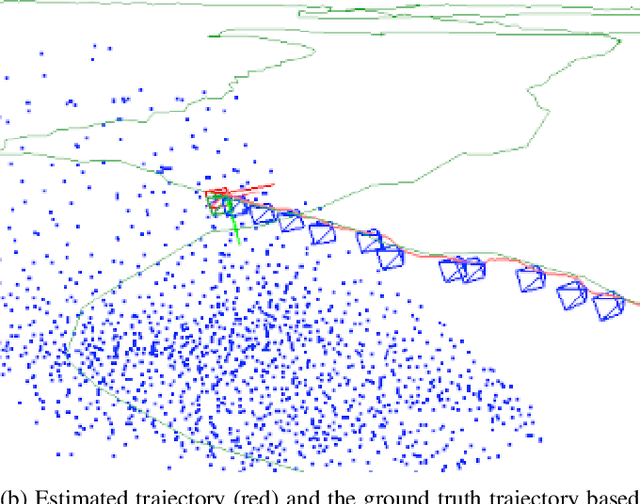
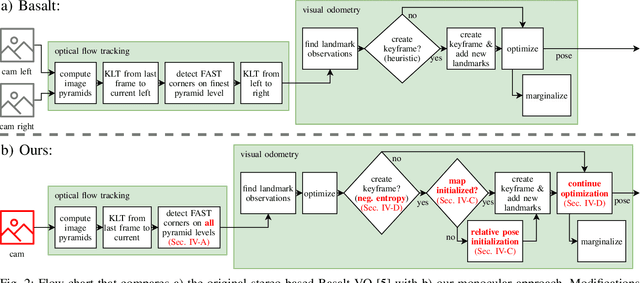
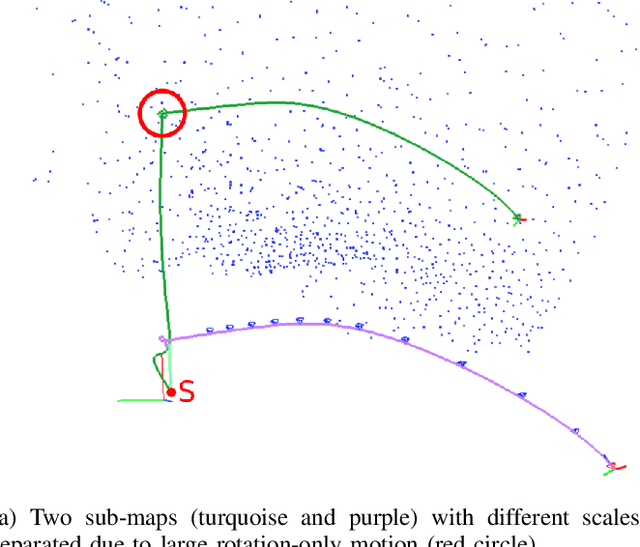
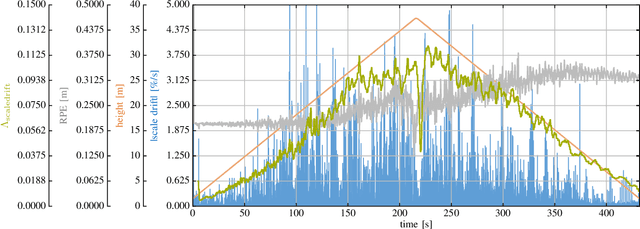
In the future, extraterrestrial expeditions will not only be conducted by rovers but also by flying robots. The technical demonstration drone Ingenuity, that just landed on Mars, will mark the beginning of a new era of exploration unhindered by terrain traversability. Robust self-localization is crucial for that. Cameras that are lightweight, cheap and information-rich sensors are already used to estimate the ego-motion of vehicles. However, methods proven to work in man-made environments cannot simply be deployed on other planets. The highly repetitive textures present in the wastelands of Mars pose a huge challenge to descriptor matching based approaches. In this paper, we present an advanced robust monocular odometry algorithm that uses efficient optical flow tracking to obtain feature correspondences between images and a refined keyframe selection criterion. In contrast to most other approaches, our framework can also handle rotation-only motions that are particularly challenging for monocular odometry systems. Furthermore, we present a novel approach to estimate the current risk of scale drift based on a principal component analysis of the relative translation information matrix. This way we obtain an implicit measure of uncertainty. We evaluate the validity of our approach on all sequences of a challenging real-world dataset captured in a Mars-like environment and show that it outperforms state-of-the-art approaches.