 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemini 1.5: Unlocking multimodal understanding across millions of tokens of context
Mar 08, 2024In this report, we present the latest model of the Gemini family, Gemini 1.5 Pro, a highly compute-efficient multimodal mixture-of-experts model capable of recalling and reasoning over fine-grained information from millions of tokens of context, including multiple long documents and hours of video and audio. Gemini 1.5 Pro achieves near-perfect recall on long-context retrieval tasks across modalities, improves the state-of-the-art in long-document QA, long-video QA and long-context ASR, and matches or surpasses Gemini 1.0 Ultra's state-of-the-art performance across a broad set of benchmarks. Studying the limits of Gemini 1.5 Pro's long-context ability, we find continued improvement in next-token prediction and near-perfect retrieval (>99%) up to at least 10M tokens, a generational leap over existing models such as Claude 2.1 (200k) and GPT-4 Turbo (128k). Finally, we highlight surprising new capabilities of large language models at the frontier; when given a grammar manual for Kalamang, a language with fewer than 200 speakers worldwide, the model learns to translate English to Kalamang at a similar level to a person who learned from the same content.
Learning to Learn Faster from Human Feedback with Language Model Predictive Control
Feb 18, 2024



Large language models (LLMs) have been shown to exhibit a wide range of capabilities, such as writing robot code from language commands -- enabling non-experts to direct robot behaviors, modify them based on feedback, or compose them to perform new tasks. However, these capabilities (driven by in-context learning) are limited to short-term interactions, where users' feedback remains relevant for only as long as it fits within the context size of the LLM, and can be forgotten over longer interactions. In this work, we investigate fine-tuning the robot code-writing LLMs, to remember their in-context interactions and improve their teachability i.e., how efficiently they adapt to human inputs (measured by average number of corrections before the user considers the task successful). Our key observation is that when human-robot interactions are formulated as a partially observable Markov decision process (in which human language inputs are observations, and robot code outputs are actions), then training an LLM to complete previous interactions can be viewed as training a transition dynamics model -- that can be combined with classic robotics techniques such as model predictive control (MPC) to discover shorter paths to success. This gives rise to Language Model Predictive Control (LMPC), a framework that fine-tunes PaLM 2 to improve its teachability on 78 tasks across 5 robot embodiments -- improving non-expert teaching success rates of unseen tasks by 26.9% while reducing the average number of human corrections from 2.4 to 1.9. Experiments show that LMPC also produces strong meta-learners, improving the success rate of in-context learning new tasks on unseen robot embodiments and APIs by 31.5%. See videos, code, and demos at: https://robot-teaching.github.io/.
PIVOT: Iterative Visual Prompting Elicits Actionable Knowledge for VLMs
Feb 12, 2024



Vision language models (VLMs) have shown impressive capabilities across a variety of tasks, from logical reasoning to visual understanding. This opens the door to richer interaction with the world, for example robotic control. However, VLMs produce only textual outputs, while robotic control and other spatial tasks require outputting continuous coordinates, actions, or trajectories. How can we enable VLMs to handle such settings without fine-tuning on task-specific data? In this paper, we propose a novel visual prompting approach for VLMs that we call Prompting with Iterative Visual Optimization (PIVOT), which casts tasks as iterative visual question answering. In each iteration, the image is annotated with a visual representation of proposals that the VLM can refer to (e.g., candidate robot actions, localizations, or trajectories). The VLM then selects the best ones for the task. These proposals are iteratively refined, allowing the VLM to eventually zero in on the best available answer. We investigate PIVOT on real-world robotic navigation, real-world manipulation from images, instruction following in simulation, and additional spatial inference tasks such as localization. We find, perhaps surprisingly, that our approach enables zero-shot control of robotic systems without any robot training data, navigation in a variety of environments, and other capabilities. Although current performance is far from perfect, our work highlights potentials and limitations of this new regime and shows a promising approach for Internet-Scale VLMs in robotic and spatial reasoning domains. Website: pivot-prompt.github.io and HuggingFace: https://huggingface.co/spaces/pivot-prompt/pivot-prompt-demo.
Generative Expressive Robot Behaviors using Large Language Models
Jan 30, 2024People employ expressive behaviors to effectively communicate and coordinate their actions with others, such as nodding to acknowledge a person glancing at them or saying "excuse me" to pass people in a busy corridor. We would like robots to also demonstrate expressive behaviors in human-robot interaction. Prior work proposes rule-based methods that struggle to scale to new communication modalities or social situations, while data-driven methods require specialized datasets for each social situation the robot is used in. We propose to leverage the rich social context available from large language models (LLMs) and their ability to generate motion based on instructions or user preferences, to generate expressive robot motion that is adaptable and composable, building upon each other. Our approach utilizes few-shot chain-of-thought prompting to translate human language instructions into parametrized control code using the robot's available and learned skills. Through user studies and simulation experiments, we demonstrate that our approach produces behaviors that users found to be competent and easy to understand. Supplementary material can be found at https://generative-expressive-motion.github.io/.
AutoRT: Embodied Foundation Models for Large Scale Orchestration of Robotic Agents
Jan 23, 2024Foundation models that incorporate language, vision, and more recently actions have revolutionized the ability to harness internet scale data to reason about useful tasks. However, one of the key challenges of training embodied foundation models is the lack of data grounded in the physical world. In this paper, we propose AutoRT, a system that leverages existing foundation models to scale up the deployment of operational robots in completely unseen scenarios with minimal human supervision. AutoRT leverages vision-language models (VLMs) for scene understanding and grounding, and further uses large language models (LLMs) for proposing diverse and novel instructions to be performed by a fleet of robots. Guiding data collection by tapping into the knowledge of foundation models enables AutoRT to effectively reason about autonomy tradeoffs and safety while significantly scaling up data collection for robot learning. We demonstrate AutoRT proposing instructions to over 20 robots across multiple buildings and collecting 77k real robot episodes via both teleoperation and autonomous robot policies. We experimentally show that such "in-the-wild" data collected by AutoRT is significantly more diverse, and that AutoRT's use of LLMs allows for instruction following data collection robots that can align to human preferences.
SpatialVLM: Endowing Vision-Language Models with Spatial Reasoning Capabilities
Jan 22, 2024Understanding and reasoning about spatial relationships is a fundamental capability for Visual Question Answering (VQA) and robotics. While Vision Language Models (VLM) have demonstrated remarkable performance in certain VQA benchmarks, they still lack capabilities in 3D spatial reasoning, such as recognizing quantitative relationships of physical objects like distances or size differences. We hypothesize that VLMs' limited spatial reasoning capability is due to the lack of 3D spatial knowledge in training data and aim to solve this problem by training VLMs with Internet-scale spatial reasoning data. To this end, we present a system to facilitate this approach. We first develop an automatic 3D spatial VQA data generation framework that scales up to 2 billion VQA examples on 10 million real-world images. We then investigate various factors in the training recipe, including data quality, training pipeline, and VLM architecture. Our work features the first internet-scale 3D spatial reasoning dataset in metric space. By training a VLM on such data, we significantly enhance its ability on both qualitative and quantitative spatial VQA. Finally, we demonstrate that this VLM unlocks novel downstream applications in chain-of-thought spatial reasoning and robotics due to its quantitative estimation capability. Project website: https://spatial-vlm.github.io/
Toward General-Purpose Robots via Foundation Models: A Survey and Meta-Analysis
Dec 15, 2023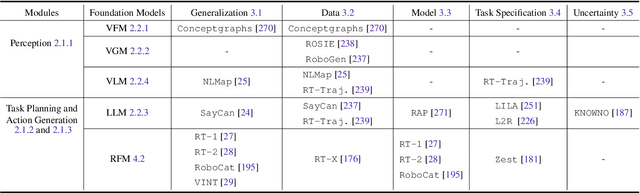
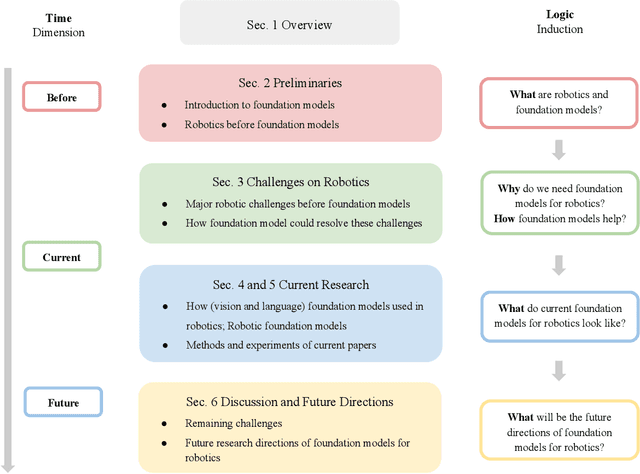
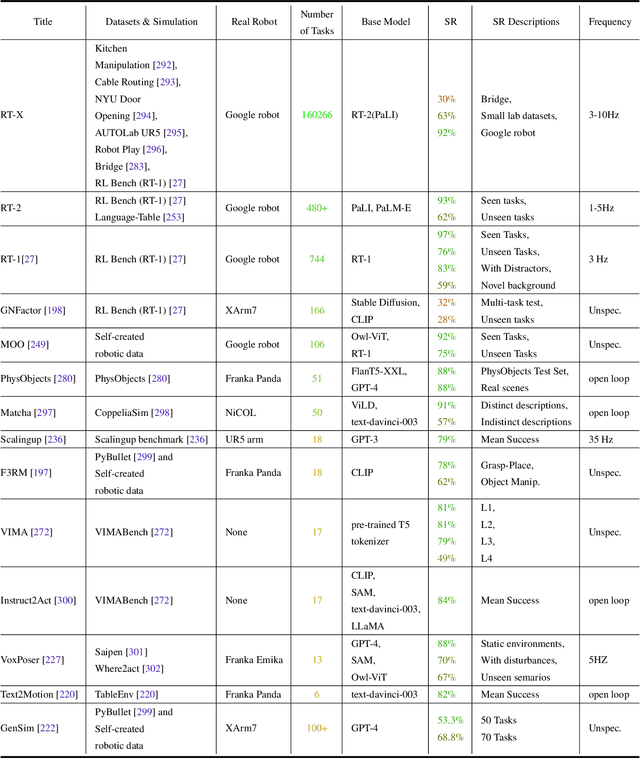
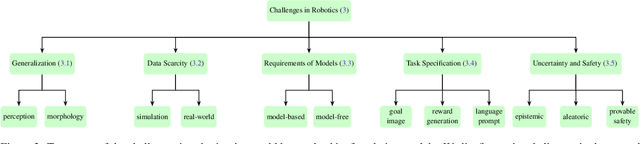
Building general-purpose robots that can operate seamlessly, in any environment, with any object, and utilizing various skills to complete diverse tasks has been a long-standing goal in Artificial Intelligence. Unfortunately, however, most existing robotic systems have been constrained - having been designed for specific tasks, trained on specific datasets, and deployed within specific environments. These systems usually require extensively-labeled data, rely on task-specific models, have numerous generalization issues when deployed in real-world scenarios, and struggle to remain robust to distribution shifts. Motivated by the impressive open-set performance and content generation capabilities of web-scale, large-capacity pre-trained models (i.e., foundation models) in research fields such as Natural Language Processing (NLP) and Computer Vision (CV), we devote this survey to exploring (i) how these existing foundation models from NLP and CV can be applied to the field of robotics, and also exploring (ii) what a robotics-specific foundation model would look like. We begin by providing an overview of what constitutes a conventional robotic system and the fundamental barriers to making it universally applicable. Next, we establish a taxonomy to discuss current work exploring ways to leverage existing foundation models for robotics and develop ones catered to robotics. Finally, we discuss key challenges and promising future directions in using foundation models for enabling general-purpose robotic systems. We encourage readers to view our living GitHub repository of resources, including papers reviewed in this survey as well as related projects and repositories for developing foundation models for robotics.
Chain of Code: Reasoning with a Language Model-Augmented Code Emulator
Dec 08, 2023



Code provides a general syntactic structure to build complex programs and perform precise computations when paired with a code interpreter - we hypothesize that language models (LMs) can leverage code-writing to improve Chain of Thought reasoning not only for logic and arithmetic tasks, but also for semantic ones (and in particular, those that are a mix of both). For example, consider prompting an LM to write code that counts the number of times it detects sarcasm in an essay: the LM may struggle to write an implementation for "detect_sarcasm(string)" that can be executed by the interpreter (handling the edge cases would be insurmountable). However, LMs may still produce a valid solution if they not only write code, but also selectively "emulate" the interpreter by generating the expected output of "detect_sarcasm(string)" and other lines of code that cannot be executed. In this work, we propose Chain of Code (CoC), a simple yet surprisingly effective extension that improves LM code-driven reasoning. The key idea is to encourage LMs to format semantic sub-tasks in a program as flexible pseudocode that the interpreter can explicitly catch undefined behaviors and hand off to simulate with an LM (as an "LMulator"). Experiments demonstrate that Chain of Code outperforms Chain of Thought and other baselines across a variety of benchmarks; on BIG-Bench Hard, Chain of Code achieves 84%, a gain of 12% over Chain of Thought. CoC scales well with large and small models alike, and broadens the scope of reasoning questions that LMs can correctly answer by "thinking in code". Project webpage: https://chain-of-code.github.io.
Distilling and Retrieving Generalizable Knowledge for Robot Manipulation via Language Corrections
Nov 17, 2023



Today's robot policies exhibit subpar performance when faced with the challenge of generalizing to novel environments. Human corrective feedback is a crucial form of guidance to enable such generalization. However, adapting to and learning from online human corrections is a non-trivial endeavor: not only do robots need to remember human feedback over time to retrieve the right information in new settings and reduce the intervention rate, but also they would need to be able to respond to feedback that can be arbitrary corrections about high-level human preferences to low-level adjustments to skill parameters. In this work, we present Distillation and Retrieval of Online Corrections (DROC), a large language model (LLM)-based system that can respond to arbitrary forms of language feedback, distill generalizable knowledge from corrections, and retrieve relevant past experiences based on textual and visual similarity for improving performance in novel settings. DROC is able to respond to a sequence of online language corrections that address failures in both high-level task plans and low-level skill primitives. We demonstrate that DROC effectively distills the relevant information from the sequence of online corrections in a knowledge base and retrieves that knowledge in settings with new task or object instances. DROC outperforms other techniques that directly generate robot code via LLMs by using only half of the total number of corrections needed in the first round and requires little to no corrections after two iterations. We show further results, videos, prompts and code on https://sites.google.com/stanford.edu/droc .
RoboVQA: Multimodal Long-Horizon Reasoning for Robotics
Nov 01, 2023



We present a scalable, bottom-up and intrinsically diverse data collection scheme that can be used for high-level reasoning with long and medium horizons and that has 2.2x higher throughput compared to traditional narrow top-down step-by-step collection. We collect realistic data by performing any user requests within the entirety of 3 office buildings and using multiple robot and human embodiments. With this data, we show that models trained on all embodiments perform better than ones trained on the robot data only, even when evaluated solely on robot episodes. We find that for a fixed collection budget it is beneficial to take advantage of cheaper human collection along with robot collection. We release a large and highly diverse (29,520 unique instructions) dataset dubbed RoboVQA containing 829,502 (video, text) pairs for robotics-focused visual question answering. We also demonstrate how evaluating real robot experiments with an intervention mechanism enables performing tasks to completion, making it deployable with human oversight even if imperfect while also providing a single performance metric. We demonstrate a single video-conditioned model named RoboVQA-VideoCoCa trained on our dataset that is capable of performing a variety of grounded high-level reasoning tasks in broad realistic settings with a cognitive intervention rate 46% lower than the zero-shot state of the art visual language model (VLM) baseline and is able to guide real robots through long-horizon tasks. The performance gap with zero-shot state-of-the-art models indicates that a lot of grounded data remains to be collected for real-world deployment, emphasizing the critical need for scalable data collection approaches. Finally, we show that video VLMs significantly outperform single-image VLMs with an average error rate reduction of 19% across all VQA tasks. Data and videos available at https://robovqa.github.io