 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen X-Embodiment: Robotic Learning Datasets and RT-X Models
Oct 17, 2023



Large, high-capacity models trained on diverse datasets have shown remarkable successes on efficiently tackling downstream applications. In domains from NLP to Computer Vision, this has led to a consolidation of pretrained models, with general pretrained backbones serving as a starting point for many applications. Can such a consolidation happen in robotics? Conventionally, robotic learning methods train a separate model for every application, every robot, and even every environment. Can we instead train generalist X-robot policy that can be adapted efficiently to new robots, tasks, and environments? In this paper, we provide datasets in standardized data formats and models to make it possible to explore this possibility in the context of robotic manipulation, alongside experimental results that provide an example of effective X-robot policies. We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms. More details can be found on the project website $\href{https://robotics-transformer-x.github.io}{\text{robotics-transformer-x.github.io}}$.
Robotic Table Wiping via Reinforcement Learning and Whole-body Trajectory Optimization
Oct 19, 2022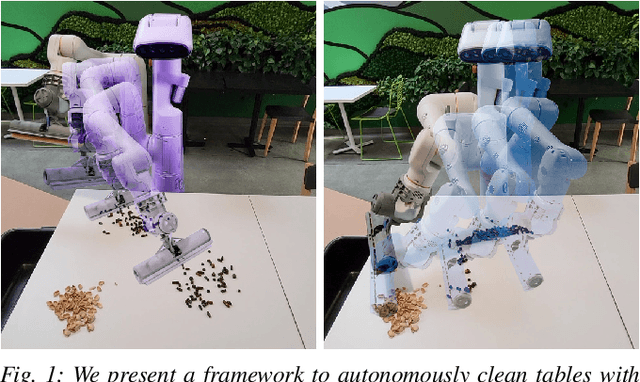
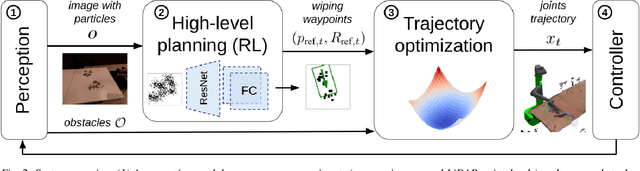
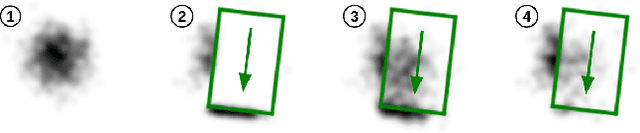
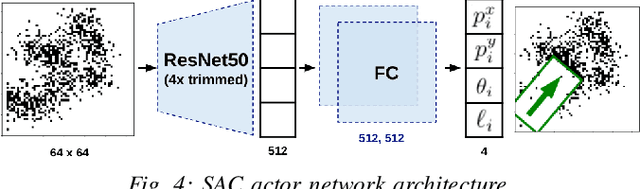
We propose a framework to enable multipurpose assistive mobile robots to autonomously wipe tables to clean spills and crumbs. This problem is challenging, as it requires planning wiping actions while reasoning over uncertain latent dynamics of crumbs and spills captured via high-dimensional visual observations. Simultaneously, we must guarantee constraints satisfaction to enable safe deployment in unstructured cluttered environments. To tackle this problem, we first propose a stochastic differential equation to model crumbs and spill dynamics and absorption with a robot wiper. Using this model, we train a vision-based policy for planning wiping actions in simulation using reinforcement learning (RL). To enable zero-shot sim-to-real deployment, we dovetail the RL policy with a whole-body trajectory optimization framework to compute base and arm joint trajectories that execute the desired wiping motions while guaranteeing constraints satisfaction. We extensively validate our approach in simulation and on hardware. Video: https://youtu.be/inORKP4F3EI
Trajectory Splitting: A Distributed Formulation for Collision Avoiding Trajectory Optimization
Nov 02, 2021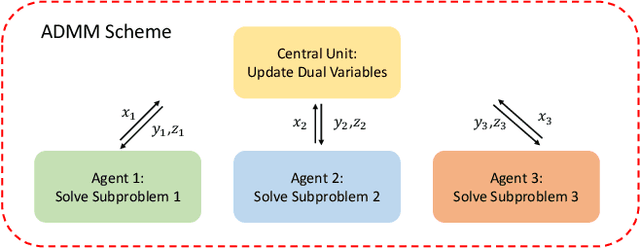
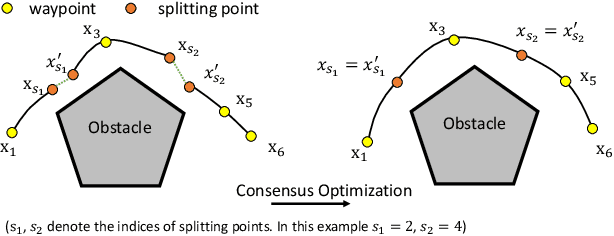
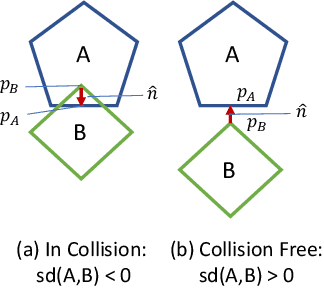
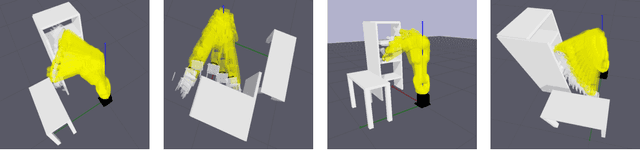
Efficient trajectory optimization is essential for avoiding collisions in unstructured environments, but it remains challenging to have both speed and quality in the solutions. One reason is that second-order optimality requires calculating Hessian matrices that can grow with $O(N^2)$ with the number of waypoints. Decreasing the waypoints can quadratically decrease computation time. Unfortunately, fewer waypoints result in lower quality trajectories that may not avoid the collision. To have both, dense waypoints and reduced computation time, we took inspiration from recent studies on consensus optimization and propose a distributed formulation of collocated trajectory optimization. It breaks a long trajectory into several segments, where each segment becomes a subproblem of a few waypoints. These subproblems are solved classically, but in parallel, and the solutions are fused into a single trajectory with a consensus constraint that enforces continuity of the segments through a consensus update. With this scheme, the quadratic complexity is distributed to each segment and enables solving for higher-quality trajectories with denser waypoints. Furthermore, the proposed formulation is amenable to using any existing trajectory optimizer for solving the subproblems. We compare the performance of our implementation of trajectory splitting against leading motion planning algorithms and demonstrate the improved computational efficiency of our method.