 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Gemini Robotics Policies in a Veo World Simulator
Dec 11, 2025Generative world models hold significant potential for simulating interactions with visuomotor policies in varied environments. Frontier video models can enable generation of realistic observations and environment interactions in a scalable and general manner. However, the use of video models in robotics has been limited primarily to in-distribution evaluations, i.e., scenarios that are similar to ones used to train the policy or fine-tune the base video model. In this report, we demonstrate that video models can be used for the entire spectrum of policy evaluation use cases in robotics: from assessing nominal performance to out-of-distribution (OOD) generalization, and probing physical and semantic safety. We introduce a generative evaluation system built upon a frontier video foundation model (Veo). The system is optimized to support robot action conditioning and multi-view consistency, while integrating generative image-editing and multi-view completion to synthesize realistic variations of real-world scenes along multiple axes of generalization. We demonstrate that the system preserves the base capabilities of the video model to enable accurate simulation of scenes that have been edited to include novel interaction objects, novel visual backgrounds, and novel distractor objects. This fidelity enables accurately predicting the relative performance of different policies in both nominal and OOD conditions, determining the relative impact of different axes of generalization on policy performance, and performing red teaming of policies to expose behaviors that violate physical or semantic safety constraints. We validate these capabilities through 1600+ real-world evaluations of eight Gemini Robotics policy checkpoints and five tasks for a bimanual manipulator.
Robo-DM: Data Management For Large Robot Datasets
May 21, 2025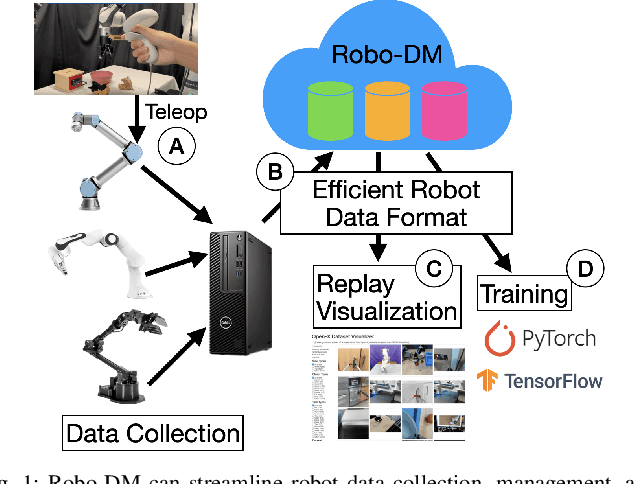
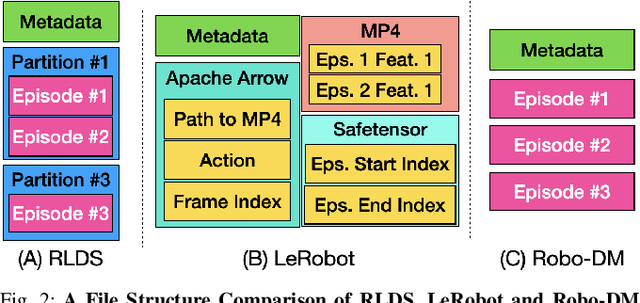
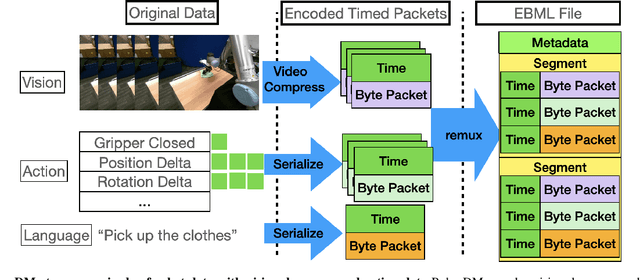
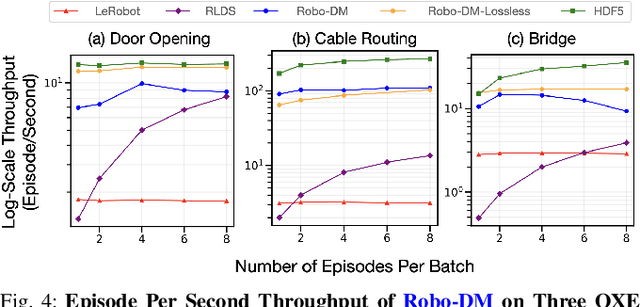
Recent results suggest that very large datasets of teleoperated robot demonstrations can be used to train transformer-based models that have the potential to generalize to new scenes, robots, and tasks. However, curating, distributing, and loading large datasets of robot trajectories, which typically consist of video, textual, and numerical modalities - including streams from multiple cameras - remains challenging. We propose Robo-DM, an efficient open-source cloud-based data management toolkit for collecting, sharing, and learning with robot data. With Robo-DM, robot datasets are stored in a self-contained format with Extensible Binary Meta Language (EBML). Robo-DM can significantly reduce the size of robot trajectory data, transfer costs, and data load time during training. Compared to the RLDS format used in OXE datasets, Robo-DM's compression saves space by up to 70x (lossy) and 3.5x (lossless). Robo-DM also accelerates data retrieval by load-balancing video decoding with memory-mapped decoding caches. Compared to LeRobot, a framework that also uses lossy video compression, Robo-DM is up to 50x faster when decoding sequentially. We physically evaluate a model trained by Robo-DM with lossy compression, a pick-and-place task, and In-Context Robot Transformer. Robo-DM uses 75x compression of the original dataset and does not suffer reduction in downstream task accuracy.
Gemini Robotics: Bringing AI into the Physical World
Mar 25, 2025Recent advancements in large multimodal models have led to the emergence of remarkable generalist capabilities in digital domains, yet their translation to physical agents such as robots remains a significant challenge. This report introduces a new family of AI models purposefully designed for robotics and built upon the foundation of Gemini 2.0. We present Gemini Robotics, an advanced Vision-Language-Action (VLA) generalist model capable of directly controlling robots. Gemini Robotics executes smooth and reactive movements to tackle a wide range of complex manipulation tasks while also being robust to variations in object types and positions, handling unseen environments as well as following diverse, open vocabulary instructions. We show that with additional fine-tuning, Gemini Robotics can be specialized to new capabilities including solving long-horizon, highly dexterous tasks, learning new short-horizon tasks from as few as 100 demonstrations and adapting to completely novel robot embodiments. This is made possible because Gemini Robotics builds on top of the Gemini Robotics-ER model, the second model we introduce in this work. Gemini Robotics-ER (Embodied Reasoning) extends Gemini's multimodal reasoning capabilities into the physical world, with enhanced spatial and temporal understanding. This enables capabilities relevant to robotics including object detection, pointing, trajectory and grasp prediction, as well as multi-view correspondence and 3D bounding box predictions. We show how this novel combination can support a variety of robotics applications. We also discuss and address important safety considerations related to this new class of robotics foundation models. The Gemini Robotics family marks a substantial step towards developing general-purpose robots that realizes AI's potential in the physical world.
Vision Language Models are In-Context Value Learners
Nov 07, 2024



Predicting temporal progress from visual trajectories is important for intelligent robots that can learn, adapt, and improve. However, learning such progress estimator, or temporal value function, across different tasks and domains requires both a large amount of diverse data and methods which can scale and generalize. To address these challenges, we present Generative Value Learning (\GVL), a universal value function estimator that leverages the world knowledge embedded in vision-language models (VLMs) to predict task progress. Naively asking a VLM to predict values for a video sequence performs poorly due to the strong temporal correlation between successive frames. Instead, GVL poses value estimation as a temporal ordering problem over shuffled video frames; this seemingly more challenging task encourages VLMs to more fully exploit their underlying semantic and temporal grounding capabilities to differentiate frames based on their perceived task progress, consequently producing significantly better value predictions. Without any robot or task specific training, GVL can in-context zero-shot and few-shot predict effective values for more than 300 distinct real-world tasks across diverse robot platforms, including challenging bimanual manipulation tasks. Furthermore, we demonstrate that GVL permits flexible multi-modal in-context learning via examples from heterogeneous tasks and embodiments, such as human videos. The generality of GVL enables various downstream applications pertinent to visuomotor policy learning, including dataset filtering, success detection, and advantage-weighted regression -- all without any model training or finetuning.
RT-Affordance: Affordances are Versatile Intermediate Representations for Robot Manipulation
Nov 05, 2024We explore how intermediate policy representations can facilitate generalization by providing guidance on how to perform manipulation tasks. Existing representations such as language, goal images, and trajectory sketches have been shown to be helpful, but these representations either do not provide enough context or provide over-specified context that yields less robust policies. We propose conditioning policies on affordances, which capture the pose of the robot at key stages of the task. Affordances offer expressive yet lightweight abstractions, are easy for users to specify, and facilitate efficient learning by transferring knowledge from large internet datasets. Our method, RT-Affordance, is a hierarchical model that first proposes an affordance plan given the task language, and then conditions the policy on this affordance plan to perform manipulation. Our model can flexibly bridge heterogeneous sources of supervision including large web datasets and robot trajectories. We additionally train our model on cheap-to-collect in-domain affordance images, allowing us to learn new tasks without collecting any additional costly robot trajectories. We show on a diverse set of novel tasks how RT-Affordance exceeds the performance of existing methods by over 50%, and we empirically demonstrate that affordances are robust to novel settings. Videos available at https://snasiriany.me/rt-affordance
STEER: Flexible Robotic Manipulation via Dense Language Grounding
Nov 05, 2024



The complexity of the real world demands robotic systems that can intelligently adapt to unseen situations. We present STEER, a robot learning framework that bridges high-level, commonsense reasoning with precise, flexible low-level control. Our approach translates complex situational awareness into actionable low-level behavior through training language-grounded policies with dense annotation. By structuring policy training around fundamental, modular manipulation skills expressed in natural language, STEER exposes an expressive interface for humans or Vision-Language Models (VLMs) to intelligently orchestrate the robot's behavior by reasoning about the task and context. Our experiments demonstrate the skills learned via STEER can be combined to synthesize novel behaviors to adapt to new situations or perform completely new tasks without additional data collection or training.
Gen2Act: Human Video Generation in Novel Scenarios enables Generalizable Robot Manipulation
Sep 24, 2024



How can robot manipulation policies generalize to novel tasks involving unseen object types and new motions? In this paper, we provide a solution in terms of predicting motion information from web data through human video generation and conditioning a robot policy on the generated video. Instead of attempting to scale robot data collection which is expensive, we show how we can leverage video generation models trained on easily available web data, for enabling generalization. Our approach Gen2Act casts language-conditioned manipulation as zero-shot human video generation followed by execution with a single policy conditioned on the generated video. To train the policy, we use an order of magnitude less robot interaction data compared to what the video prediction model was trained on. Gen2Act doesn't require fine-tuning the video model at all and we directly use a pre-trained model for generating human videos. Our results on diverse real-world scenarios show how Gen2Act enables manipulating unseen object types and performing novel motions for tasks not present in the robot data. Videos are at https://homangab.github.io/gen2act/
OpenVLA: An Open-Source Vision-Language-Action Model
Jun 13, 2024



Large policies pretrained on a combination of Internet-scale vision-language data and diverse robot demonstrations have the potential to change how we teach robots new skills: rather than training new behaviors from scratch, we can fine-tune such vision-language-action (VLA) models to obtain robust, generalizable policies for visuomotor control. Yet, widespread adoption of VLAs for robotics has been challenging as 1) existing VLAs are largely closed and inaccessible to the public, and 2) prior work fails to explore methods for efficiently fine-tuning VLAs for new tasks, a key component for adoption. Addressing these challenges, we introduce OpenVLA, a 7B-parameter open-source VLA trained on a diverse collection of 970k real-world robot demonstrations. OpenVLA builds on a Llama 2 language model combined with a visual encoder that fuses pretrained features from DINOv2 and SigLIP. As a product of the added data diversity and new model components, OpenVLA demonstrates strong results for generalist manipulation, outperforming closed models such as RT-2-X (55B) by 16.5% in absolute task success rate across 29 tasks and multiple robot embodiments, with 7x fewer parameters. We further show that we can effectively fine-tune OpenVLA for new settings, with especially strong generalization results in multi-task environments involving multiple objects and strong language grounding abilities, and outperform expressive from-scratch imitation learning methods such as Diffusion Policy by 20.4%. We also explore compute efficiency; as a separate contribution, we show that OpenVLA can be fine-tuned on consumer GPUs via modern low-rank adaptation methods and served efficiently via quantization without a hit to downstream success rate. Finally, we release model checkpoints, fine-tuning notebooks, and our PyTorch codebase with built-in support for training VLAs at scale on Open X-Embodiment datasets.
Octo: An Open-Source Generalist Robot Policy
May 20, 2024



Large policies pretrained on diverse robot datasets have the potential to transform robotic learning: instead of training new policies from scratch, such generalist robot policies may be finetuned with only a little in-domain data, yet generalize broadly. However, to be widely applicable across a range of robotic learning scenarios, environments, and tasks, such policies need to handle diverse sensors and action spaces, accommodate a variety of commonly used robotic platforms, and finetune readily and efficiently to new domains. In this work, we aim to lay the groundwork for developing open-source, widely applicable, generalist policies for robotic manipulation. As a first step, we introduce Octo, a large transformer-based policy trained on 800k trajectories from the Open X-Embodiment dataset, the largest robot manipulation dataset to date. It can be instructed via language commands or goal images and can be effectively finetuned to robot setups with new sensory inputs and action spaces within a few hours on standard consumer GPUs. In experiments across 9 robotic platforms, we demonstrate that Octo serves as a versatile policy initialization that can be effectively finetuned to new observation and action spaces. We also perform detailed ablations of design decisions for the Octo model, from architecture to training data, to guide future research on building generalist robot models.
Evaluating Real-World Robot Manipulation Policies in Simulation
May 09, 2024



The field of robotics has made significant advances towards generalist robot manipulation policies. However, real-world evaluation of such policies is not scalable and faces reproducibility challenges, which are likely to worsen as policies broaden the spectrum of tasks they can perform. We identify control and visual disparities between real and simulated environments as key challenges for reliable simulated evaluation and propose approaches for mitigating these gaps without needing to craft full-fidelity digital twins of real-world environments. We then employ these approaches to create SIMPLER, a collection of simulated environments for manipulation policy evaluation on common real robot setups. Through paired sim-and-real evaluations of manipulation policies, we demonstrate strong correlation between policy performance in SIMPLER environments and in the real world. Additionally, we find that SIMPLER evaluations accurately reflect real-world policy behavior modes such as sensitivity to various distribution shifts. We open-source all SIMPLER environments along with our workflow for creating new environments at https://simpler-env.github.io to facilitate research on general-purpose manipulation policies and simulated evaluation frameworks.