 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Gemini Robotics Policies in a Veo World Simulator
Dec 11, 2025Generative world models hold significant potential for simulating interactions with visuomotor policies in varied environments. Frontier video models can enable generation of realistic observations and environment interactions in a scalable and general manner. However, the use of video models in robotics has been limited primarily to in-distribution evaluations, i.e., scenarios that are similar to ones used to train the policy or fine-tune the base video model. In this report, we demonstrate that video models can be used for the entire spectrum of policy evaluation use cases in robotics: from assessing nominal performance to out-of-distribution (OOD) generalization, and probing physical and semantic safety. We introduce a generative evaluation system built upon a frontier video foundation model (Veo). The system is optimized to support robot action conditioning and multi-view consistency, while integrating generative image-editing and multi-view completion to synthesize realistic variations of real-world scenes along multiple axes of generalization. We demonstrate that the system preserves the base capabilities of the video model to enable accurate simulation of scenes that have been edited to include novel interaction objects, novel visual backgrounds, and novel distractor objects. This fidelity enables accurately predicting the relative performance of different policies in both nominal and OOD conditions, determining the relative impact of different axes of generalization on policy performance, and performing red teaming of policies to expose behaviors that violate physical or semantic safety constraints. We validate these capabilities through 1600+ real-world evaluations of eight Gemini Robotics policy checkpoints and five tasks for a bimanual manipulator.
Gemini Robotics: Bringing AI into the Physical World
Mar 25, 2025Recent advancements in large multimodal models have led to the emergence of remarkable generalist capabilities in digital domains, yet their translation to physical agents such as robots remains a significant challenge. This report introduces a new family of AI models purposefully designed for robotics and built upon the foundation of Gemini 2.0. We present Gemini Robotics, an advanced Vision-Language-Action (VLA) generalist model capable of directly controlling robots. Gemini Robotics executes smooth and reactive movements to tackle a wide range of complex manipulation tasks while also being robust to variations in object types and positions, handling unseen environments as well as following diverse, open vocabulary instructions. We show that with additional fine-tuning, Gemini Robotics can be specialized to new capabilities including solving long-horizon, highly dexterous tasks, learning new short-horizon tasks from as few as 100 demonstrations and adapting to completely novel robot embodiments. This is made possible because Gemini Robotics builds on top of the Gemini Robotics-ER model, the second model we introduce in this work. Gemini Robotics-ER (Embodied Reasoning) extends Gemini's multimodal reasoning capabilities into the physical world, with enhanced spatial and temporal understanding. This enables capabilities relevant to robotics including object detection, pointing, trajectory and grasp prediction, as well as multi-view correspondence and 3D bounding box predictions. We show how this novel combination can support a variety of robotics applications. We also discuss and address important safety considerations related to this new class of robotics foundation models. The Gemini Robotics family marks a substantial step towards developing general-purpose robots that realizes AI's potential in the physical world.
Mobility VLA: Multimodal Instruction Navigation with Long-Context VLMs and Topological Graphs
Jul 10, 2024



An elusive goal in navigation research is to build an intelligent agent that can understand multimodal instructions including natural language and image, and perform useful navigation. To achieve this, we study a widely useful category of navigation tasks we call Multimodal Instruction Navigation with demonstration Tours (MINT), in which the environment prior is provided through a previously recorded demonstration video. Recent advances in Vision Language Models (VLMs) have shown a promising path in achieving this goal as it demonstrates capabilities in perceiving and reasoning about multimodal inputs. However, VLMs are typically trained to predict textual output and it is an open research question about how to best utilize them in navigation. To solve MINT, we present Mobility VLA, a hierarchical Vision-Language-Action (VLA) navigation policy that combines the environment understanding and common sense reasoning power of long-context VLMs and a robust low-level navigation policy based on topological graphs. The high-level policy consists of a long-context VLM that takes the demonstration tour video and the multimodal user instruction as input to find the goal frame in the tour video. Next, a low-level policy uses the goal frame and an offline constructed topological graph to generate robot actions at every timestep. We evaluated Mobility VLA in a 836m^2 real world environment and show that Mobility VLA has a high end-to-end success rates on previously unsolved multimodal instructions such as "Where should I return this?" while holding a plastic bin.
Learning to Learn Faster from Human Feedback with Language Model Predictive Control
Feb 18, 2024



Large language models (LLMs) have been shown to exhibit a wide range of capabilities, such as writing robot code from language commands -- enabling non-experts to direct robot behaviors, modify them based on feedback, or compose them to perform new tasks. However, these capabilities (driven by in-context learning) are limited to short-term interactions, where users' feedback remains relevant for only as long as it fits within the context size of the LLM, and can be forgotten over longer interactions. In this work, we investigate fine-tuning the robot code-writing LLMs, to remember their in-context interactions and improve their teachability i.e., how efficiently they adapt to human inputs (measured by average number of corrections before the user considers the task successful). Our key observation is that when human-robot interactions are formulated as a partially observable Markov decision process (in which human language inputs are observations, and robot code outputs are actions), then training an LLM to complete previous interactions can be viewed as training a transition dynamics model -- that can be combined with classic robotics techniques such as model predictive control (MPC) to discover shorter paths to success. This gives rise to Language Model Predictive Control (LMPC), a framework that fine-tunes PaLM 2 to improve its teachability on 78 tasks across 5 robot embodiments -- improving non-expert teaching success rates of unseen tasks by 26.9% while reducing the average number of human corrections from 2.4 to 1.9. Experiments show that LMPC also produces strong meta-learners, improving the success rate of in-context learning new tasks on unseen robot embodiments and APIs by 31.5%. See videos, code, and demos at: https://robot-teaching.github.io/.
Generative Expressive Robot Behaviors using Large Language Models
Jan 30, 2024People employ expressive behaviors to effectively communicate and coordinate their actions with others, such as nodding to acknowledge a person glancing at them or saying "excuse me" to pass people in a busy corridor. We would like robots to also demonstrate expressive behaviors in human-robot interaction. Prior work proposes rule-based methods that struggle to scale to new communication modalities or social situations, while data-driven methods require specialized datasets for each social situation the robot is used in. We propose to leverage the rich social context available from large language models (LLMs) and their ability to generate motion based on instructions or user preferences, to generate expressive robot motion that is adaptable and composable, building upon each other. Our approach utilizes few-shot chain-of-thought prompting to translate human language instructions into parametrized control code using the robot's available and learned skills. Through user studies and simulation experiments, we demonstrate that our approach produces behaviors that users found to be competent and easy to understand. Supplementary material can be found at https://generative-expressive-motion.github.io/.
Robots That Can See: Leveraging Human Pose for Trajectory Prediction
Sep 29, 2023



Anticipating the motion of all humans in dynamic environments such as homes and offices is critical to enable safe and effective robot navigation. Such spaces remain challenging as humans do not follow strict rules of motion and there are often multiple occluded entry points such as corners and doors that create opportunities for sudden encounters. In this work, we present a Transformer based architecture to predict human future trajectories in human-centric environments from input features including human positions, head orientations, and 3D skeletal keypoints from onboard in-the-wild sensory information. The resulting model captures the inherent uncertainty for future human trajectory prediction and achieves state-of-the-art performance on common prediction benchmarks and a human tracking dataset captured from a mobile robot adapted for the prediction task. Furthermore, we identify new agents with limited historical data as a major contributor to error and demonstrate the complementary nature of 3D skeletal poses in reducing prediction error in such challenging scenarios.
* Project page: https://human-scene-transformer.github.io/
Barkour: Benchmarking Animal-level Agility with Quadruped Robots
May 24, 2023



Animals have evolved various agile locomotion strategies, such as sprinting, leaping, and jumping. There is a growing interest in developing legged robots that move like their biological counterparts and show various agile skills to navigate complex environments quickly. Despite the interest, the field lacks systematic benchmarks to measure the performance of control policies and hardware in agility. We introduce the Barkour benchmark, an obstacle course to quantify agility for legged robots. Inspired by dog agility competitions, it consists of diverse obstacles and a time based scoring mechanism. This encourages researchers to develop controllers that not only move fast, but do so in a controllable and versatile way. To set strong baselines, we present two methods for tackling the benchmark. In the first approach, we train specialist locomotion skills using on-policy reinforcement learning methods and combine them with a high-level navigation controller. In the second approach, we distill the specialist skills into a Transformer-based generalist locomotion policy, named Locomotion-Transformer, that can handle various terrains and adjust the robot's gait based on the perceived environment and robot states. Using a custom-built quadruped robot, we demonstrate that our method can complete the course at half the speed of a dog. We hope that our work represents a step towards creating controllers that enable robots to reach animal-level agility.
RT-1: Robotics Transformer for Real-World Control at Scale
Dec 13, 2022



By transferring knowledge from large, diverse, task-agnostic datasets, modern machine learning models can solve specific downstream tasks either zero-shot or with small task-specific datasets to a high level of performance. While this capability has been demonstrated in other fields such as computer vision, natural language processing or speech recognition, it remains to be shown in robotics, where the generalization capabilities of the models are particularly critical due to the difficulty of collecting real-world robotic data. We argue that one of the keys to the success of such general robotic models lies with open-ended task-agnostic training, combined with high-capacity architectures that can absorb all of the diverse, robotic data. In this paper, we present a model class, dubbed Robotics Transformer, that exhibits promising scalable model properties. We verify our conclusions in a study of different model classes and their ability to generalize as a function of the data size, model size, and data diversity based on a large-scale data collection on real robots performing real-world tasks. The project's website and videos can be found at robotics-transformer.github.io
A Contextual Bandit Approach for Learning to Plan in Environments with Probabilistic Goal Configurations
Nov 29, 2022



Object-goal navigation (Object-nav) entails searching, recognizing and navigating to a target object. Object-nav has been extensively studied by the Embodied-AI community, but most solutions are often restricted to considering static objects (e.g., television, fridge, etc.). We propose a modular framework for object-nav that is able to efficiently search indoor environments for not just static objects but also movable objects (e.g. fruits, glasses, phones, etc.) that frequently change their positions due to human intervention. Our contextual-bandit agent efficiently explores the environment by showing optimism in the face of uncertainty and learns a model of the likelihood of spotting different objects from each navigable location. The likelihoods are used as rewards in a weighted minimum latency solver to deduce a trajectory for the robot. We evaluate our algorithms in two simulated environments and a real-world setting, to demonstrate high sample efficiency and reliability.
Learning Model Predictive Controllers with Real-Time Attention for Real-World Navigation
Sep 24, 2022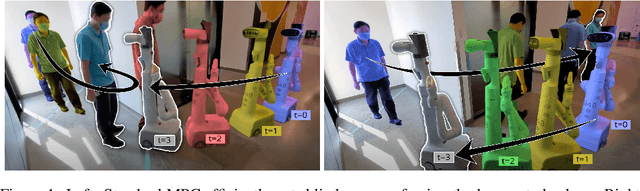

Despite decades of research, existing navigation systems still face real-world challenges when deployed in the wild, e.g., in cluttered home environments or in human-occupied public spaces. To address this, we present a new class of implicit control policies combining the benefits of imitation learning with the robust handling of system constraints from Model Predictive Control (MPC). Our approach, called Performer-MPC, uses a learned cost function parameterized by vision context embeddings provided by Performers -- a low-rank implicit-attention Transformer. We jointly train the cost function and construct the controller relying on it, effectively solving end-to-end the corresponding bi-level optimization problem. We show that the resulting policy improves standard MPC performance by leveraging a few expert demonstrations of the desired navigation behavior in different challenging real-world scenarios. Compared with a standard MPC policy, Performer-MPC achieves >40% better goal reached in cluttered environments and >65% better on social metrics when navigating around humans.