 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning Approaches to Grasp Synthesis: A Review
Jul 06, 2022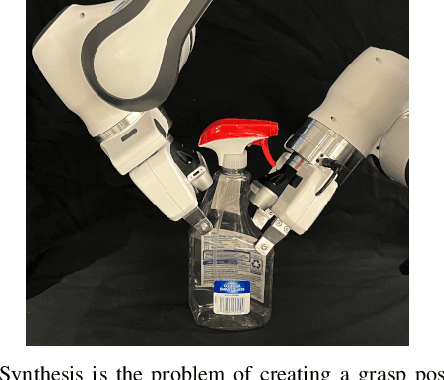
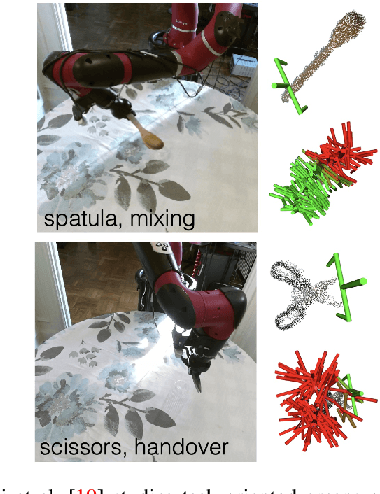
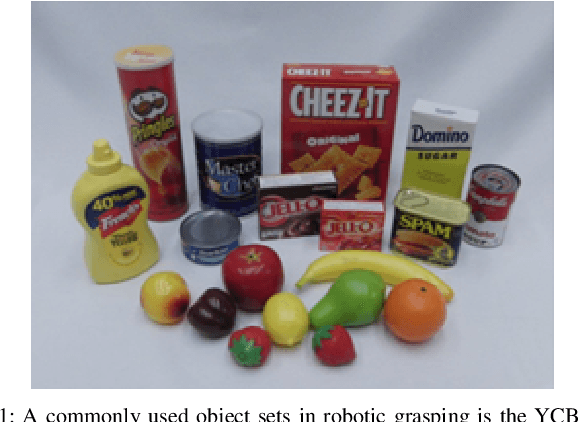
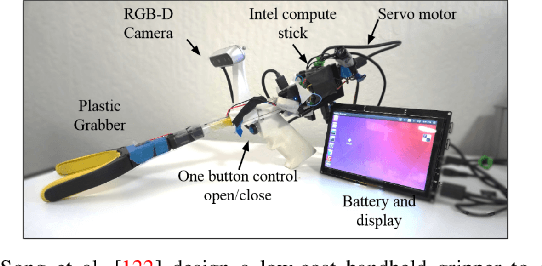
Grasping is the process of picking an object by applying forces and torques at a set of contacts. Recent advances in deep-learning methods have allowed rapid progress in robotic object grasping. We systematically surveyed the publications over the last decade, with a particular interest in grasping an object using all 6 degrees of freedom of the end-effector pose. Our review found four common methodologies for robotic grasping: sampling-based approaches, direct regression, reinforcement learning, and exemplar approaches. Furthermore, we found two 'supporting methods' around grasping that use deep-learning to support the grasping process, shape approximation, and affordances. We have distilled the publications found in this systematic review (85 papers) into ten key takeaways we consider crucial for future robotic grasping and manipulation research. An online version of the survey is available at https://rhys-newbury.github.io/projects/6dof/
Neural Motion Fields: Encoding Grasp Trajectories as Implicit Value Functions
Jun 29, 2022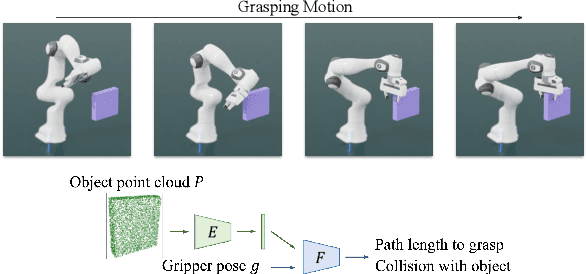
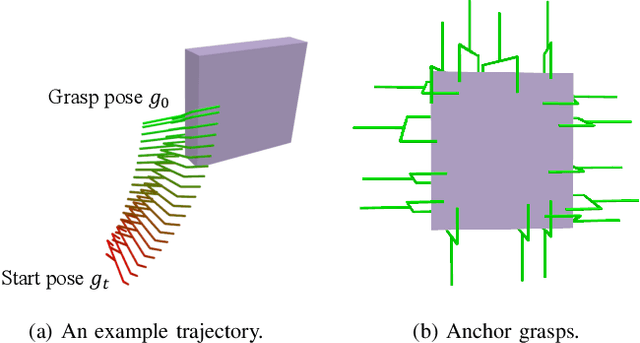
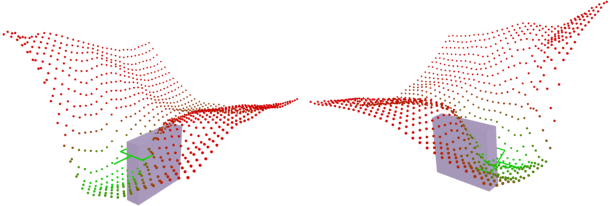

The pipeline of current robotic pick-and-place methods typically consists of several stages: grasp pose detection, finding inverse kinematic solutions for the detected poses, planning a collision-free trajectory, and then executing the open-loop trajectory to the grasp pose with a low-level tracking controller. While these grasping methods have shown good performance on grasping static objects on a table-top, the problem of grasping dynamic objects in constrained environments remains an open problem. We present Neural Motion Fields, a novel object representation which encodes both object point clouds and the relative task trajectories as an implicit value function parameterized by a neural network. This object-centric representation models a continuous distribution over the SE(3) space and allows us to perform grasping reactively by leveraging sampling-based MPC to optimize this value function.
HandoverSim: A Simulation Framework and Benchmark for Human-to-Robot Object Handovers
May 19, 2022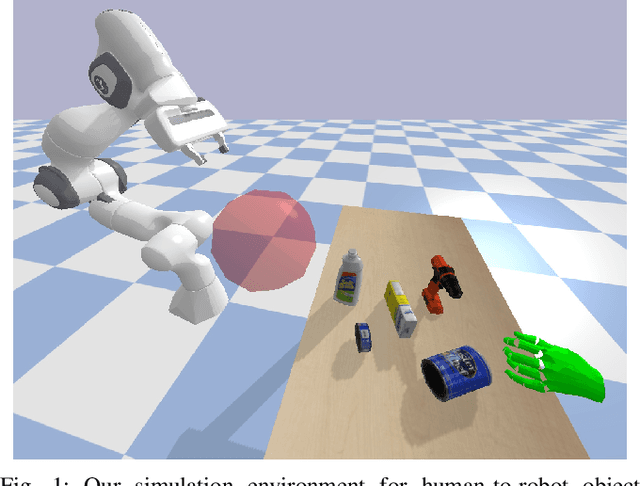

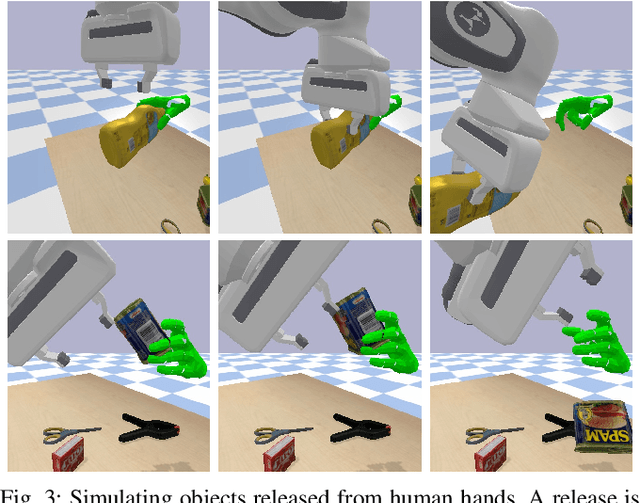
We introduce a new simulation benchmark "HandoverSim" for human-to-robot object handovers. To simulate the giver's motion, we leverage a recent motion capture dataset of hand grasping of objects. We create training and evaluation environments for the receiver with standardized protocols and metrics. We analyze the performance of a set of baselines and show a correlation with a real-world evaluation. Code is open sourced at https://handover-sim.github.io.
Factory: Fast Contact for Robotic Assembly
May 07, 2022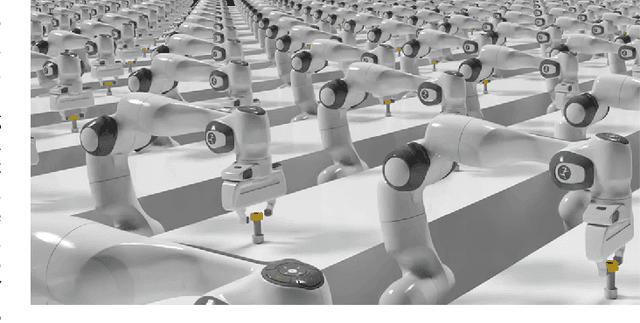
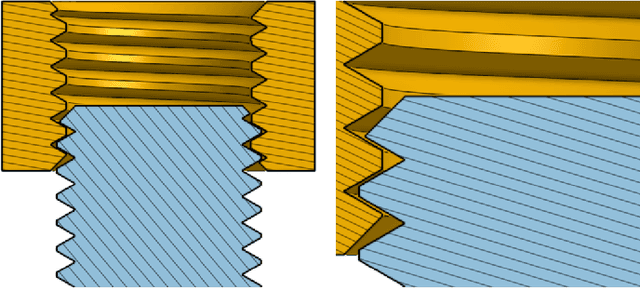
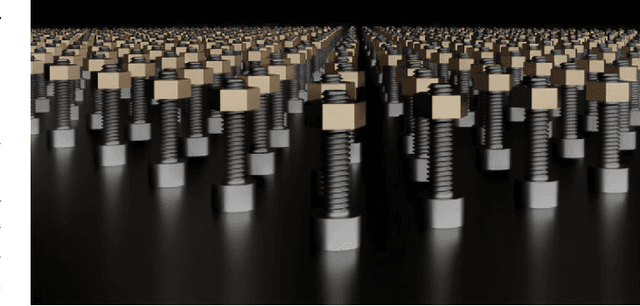
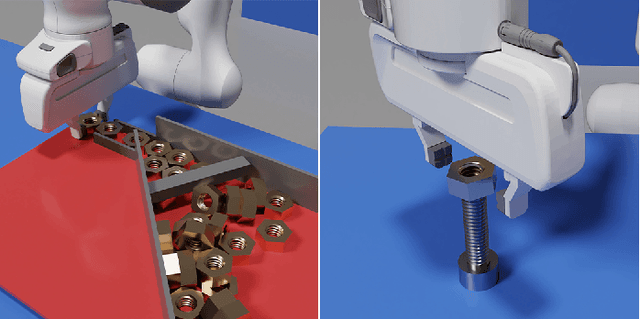
Robotic assembly is one of the oldest and most challenging applications of robotics. In other areas of robotics, such as perception and grasping, simulation has rapidly accelerated research progress, particularly when combined with modern deep learning. However, accurately, efficiently, and robustly simulating the range of contact-rich interactions in assembly remains a longstanding challenge. In this work, we present Factory, a set of physics simulation methods and robot learning tools for such applications. We achieve real-time or faster simulation of a wide range of contact-rich scenes, including simultaneous simulation of 1000 nut-and-bolt interactions. We provide $60$ carefully-designed part models, 3 robotic assembly environments, and 7 robot controllers for training and testing virtual robots. Finally, we train and evaluate proof-of-concept reinforcement learning policies for nut-and-bolt assembly. We aim for Factory to open the doors to using simulation for robotic assembly, as well as many other contact-rich applications in robotics. Please see https://sites.google.com/nvidia.com/factory for supplementary content, including videos.
Correcting Robot Plans with Natural Language Feedback
Apr 11, 2022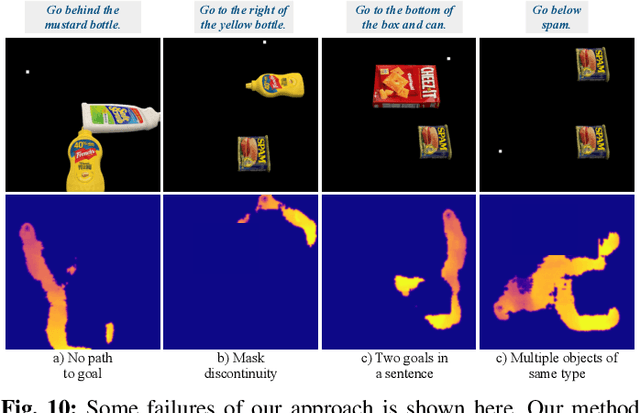
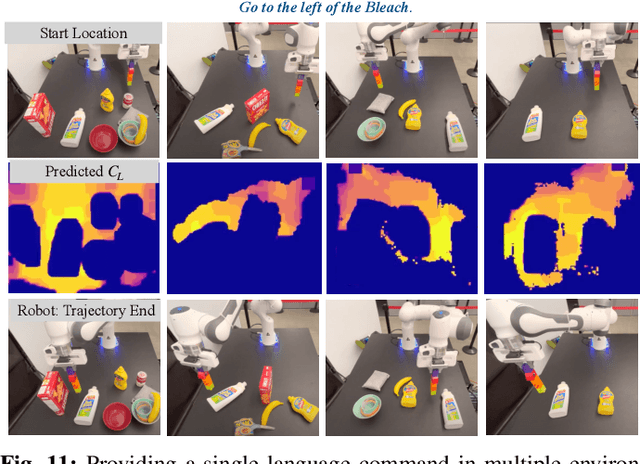

When humans design cost or goal specifications for robots, they often produce specifications that are ambiguous, underspecified, or beyond planners' ability to solve. In these cases, corrections provide a valuable tool for human-in-the-loop robot control. Corrections might take the form of new goal specifications, new constraints (e.g. to avoid specific objects), or hints for planning algorithms (e.g. to visit specific waypoints). Existing correction methods (e.g. using a joystick or direct manipulation of an end effector) require full teleoperation or real-time interaction. In this paper, we explore natural language as an expressive and flexible tool for robot correction. We describe how to map from natural language sentences to transformations of cost functions. We show that these transformations enable users to correct goals, update robot motions to accommodate additional user preferences, and recover from planning errors. These corrections can be leveraged to get 81% and 93% success rates on tasks where the original planner failed, with either one or two language corrections. Our method makes it possible to compose multiple constraints and generalizes to unseen scenes, objects, and sentences in simulated environments and real-world environments.
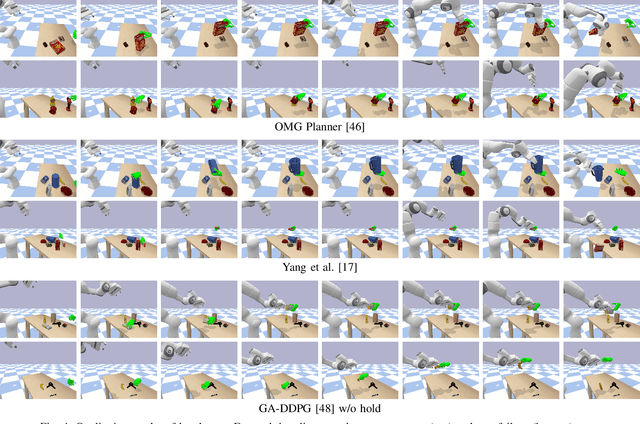
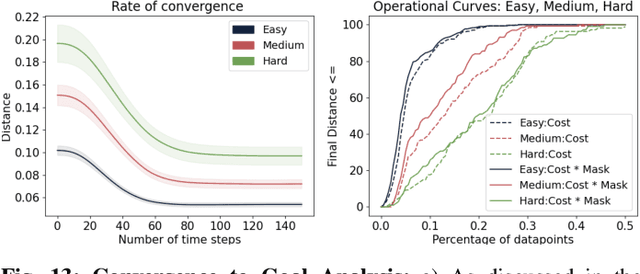
Model Predictive Control for Fluid Human-to-Robot Handovers
Mar 31, 2022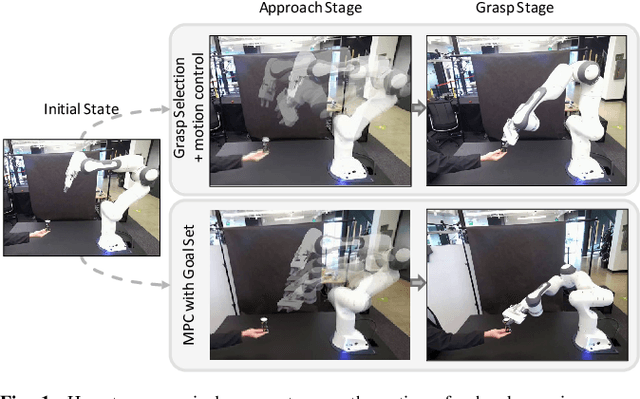

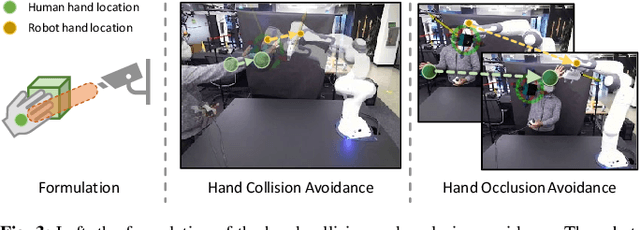
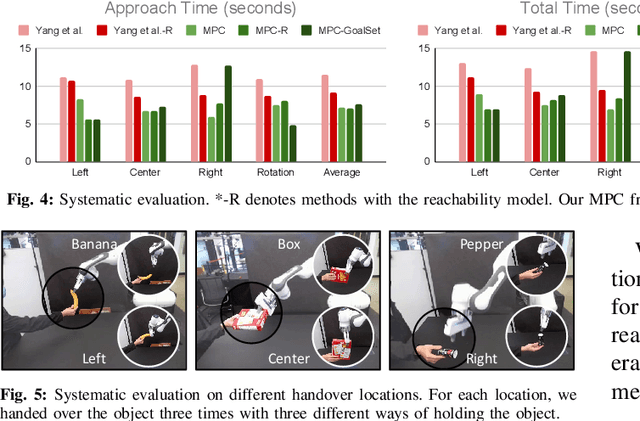
Human-robot handover is a fundamental yet challenging task in human-robot interaction and collaboration. Recently, remarkable progressions have been made in human-to-robot handovers of unknown objects by using learning-based grasp generators. However, how to responsively generate smooth motions to take an object from a human is still an open question. Specifically, planning motions that take human comfort into account is not a part of the human-robot handover process in most prior works. In this paper, we propose to generate smooth motions via an efficient model-predictive control (MPC) framework that integrates perception and complex domain-specific constraints into the optimization problem. We introduce a learning-based grasp reachability model to select candidate grasps which maximize the robot's manipulability, giving it more freedom to satisfy these constraints. Finally, we integrate a neural net force/torque classifier that detects contact events from noisy data. We conducted human-to-robot handover experiments on a diverse set of objects with several users (N=4) and performed a systematic evaluation of each module. The study shows that the users preferred our MPC approach over the baseline system by a large margin. More results and videos are available at https://sites.google.com/nvidia.com/mpc-for-handover.
DefGraspSim: Physics-based simulation of grasp outcomes for 3D deformable objects
Mar 21, 2022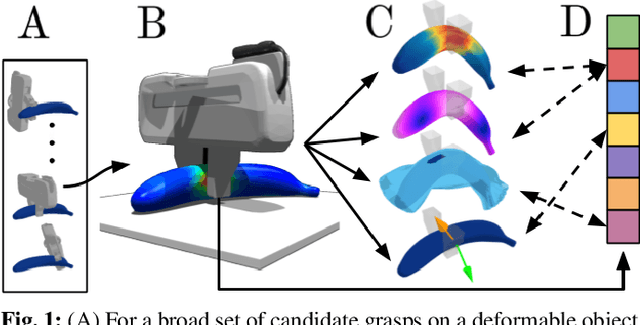
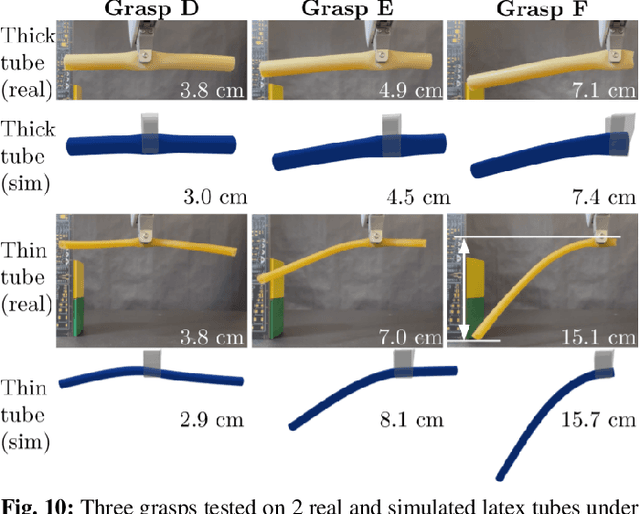
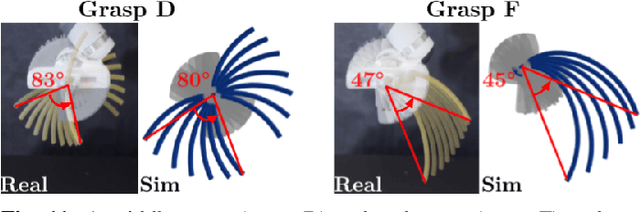

Robotic grasping of 3D deformable objects (e.g., fruits/vegetables, internal organs, bottles/boxes) is critical for real-world applications such as food processing, robotic surgery, and household automation. However, developing grasp strategies for such objects is uniquely challenging. Unlike rigid objects, deformable objects have infinite degrees of freedom and require field quantities (e.g., deformation, stress) to fully define their state. As these quantities are not easily accessible in the real world, we propose studying interaction with deformable objects through physics-based simulation. As such, we simulate grasps on a wide range of 3D deformable objects using a GPU-based implementation of the corotational finite element method (FEM). To facilitate future research, we open-source our simulated dataset (34 objects, 1e5 Pa elasticity range, 6800 grasp evaluations, 1.1M grasp measurements), as well as a code repository that allows researchers to run our full FEM-based grasp evaluation pipeline on arbitrary 3D object models of their choice. Finally, we demonstrate good correspondence between grasp outcomes on simulated objects and their real counterparts.
DiSECt: A Differentiable Simulator for Parameter Inference and Control in Robotic Cutting
Mar 19, 2022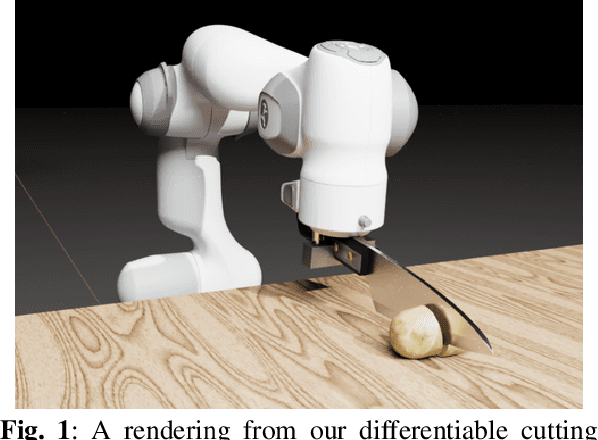
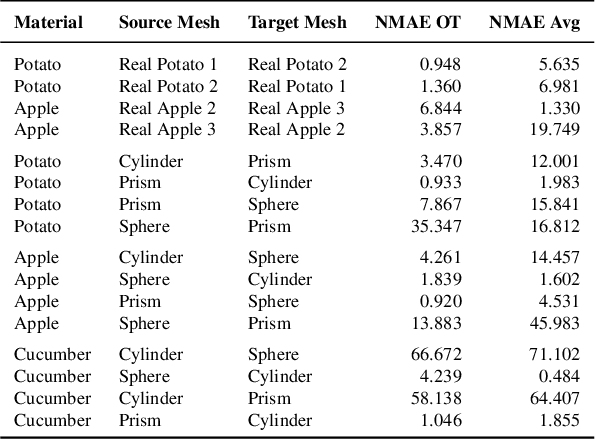
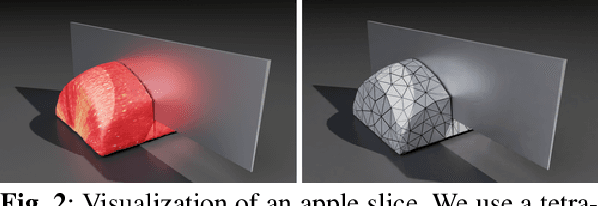
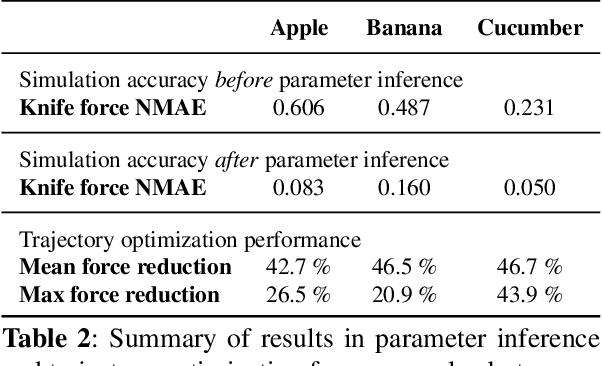
Robotic cutting of soft materials is critical for applications such as food processing, household automation, and surgical manipulation. As in other areas of robotics, simulators can facilitate controller verification, policy learning, and dataset generation. Moreover, differentiable simulators can enable gradient-based optimization, which is invaluable for calibrating simulation parameters and optimizing controllers. In this work, we present DiSECt: the first differentiable simulator for cutting soft materials. The simulator augments the finite element method (FEM) with a continuous contact model based on signed distance fields (SDF), as well as a continuous damage model that inserts springs on opposite sides of the cutting plane and allows them to weaken until zero stiffness, enabling crack formation. Through various experiments, we evaluate the performance of the simulator. We first show that the simulator can be calibrated to match resultant forces and deformation fields from a state-of-the-art commercial solver and real-world cutting datasets, with generality across cutting velocities and object instances. We then show that Bayesian inference can be performed efficiently by leveraging the differentiability of the simulator, estimating posteriors over hundreds of parameters in a fraction of the time of derivative-free methods. Next, we illustrate that control parameters in the simulation can be optimized to minimize cutting forces via lateral slicing motions. Finally, we conduct experiments on a real robot arm equipped with a slicing knife to infer simulation parameters from force measurements. By optimizing the slicing motion of the knife, we show on fruit cutting scenarios that the average knife force can be reduced by more than 40% compared to a vertical cutting motion. We publish code and additional materials on our project website at https://diff-cutting-sim.github.io.
IFOR: Iterative Flow Minimization for Robotic Object Rearrangement
Feb 01, 2022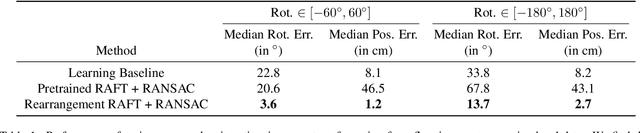
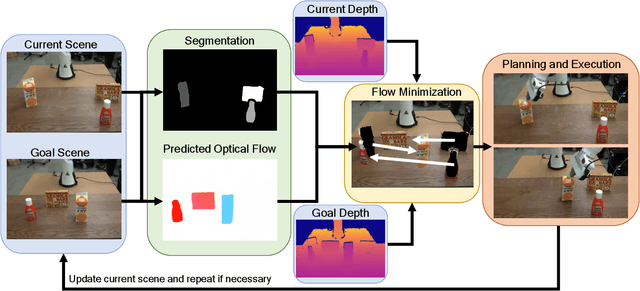
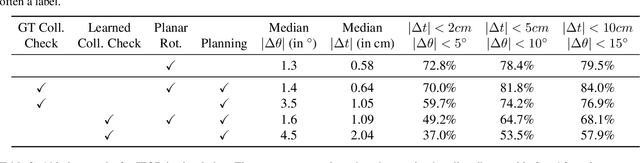

Accurate object rearrangement from vision is a crucial problem for a wide variety of real-world robotics applications in unstructured environments. We propose IFOR, Iterative Flow Minimization for Robotic Object Rearrangement, an end-to-end method for the challenging problem of object rearrangement for unknown objects given an RGBD image of the original and final scenes. First, we learn an optical flow model based on RAFT to estimate the relative transformation of the objects purely from synthetic data. This flow is then used in an iterative minimization algorithm to achieve accurate positioning of previously unseen objects. Crucially, we show that our method applies to cluttered scenes, and in the real world, while training only on synthetic data. Videos are available at https://imankgoyal.github.io/ifor.html.
iCaps: Iterative Category-level Object Pose and Shape Estimation
Dec 31, 2021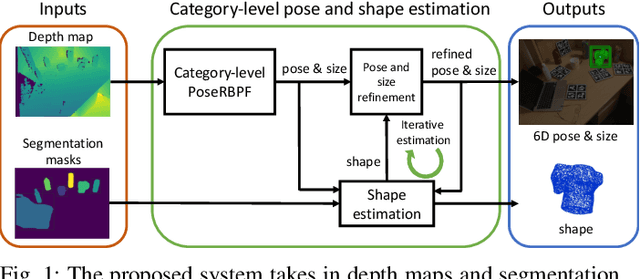
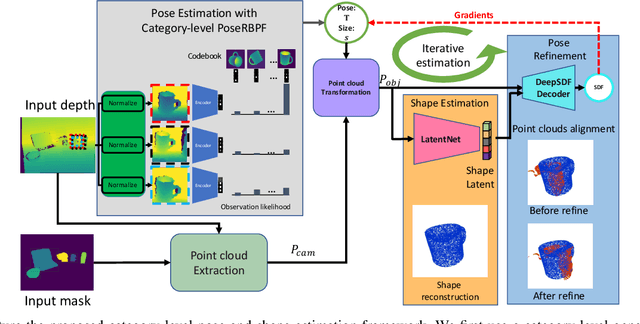
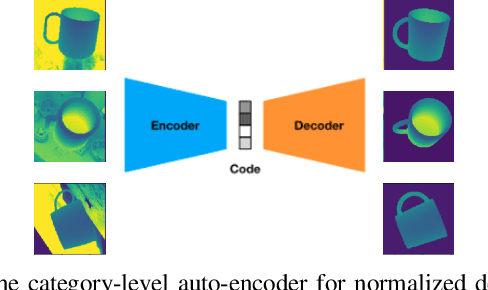
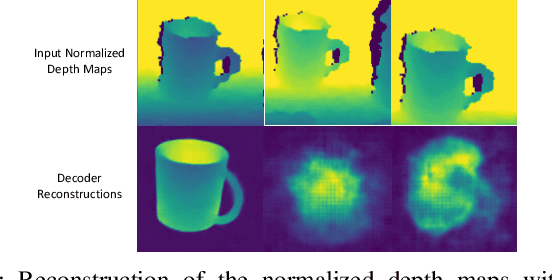
This paper proposes a category-level 6D object pose and shape estimation approach iCaps, which allows tracking 6D poses of unseen objects in a category and estimating their 3D shapes. We develop a category-level auto-encoder network using depth images as input, where feature embeddings from the auto-encoder encode poses of objects in a category. The auto-encoder can be used in a particle filter framework to estimate and track 6D poses of objects in a category. By exploiting an implicit shape representation based on signed distance functions, we build a LatentNet to estimate a latent representation of the 3D shape given the estimated pose of an object. Then the estimated pose and shape can be used to update each other in an iterative way. Our category-level 6D object pose and shape estimation pipeline only requires 2D detection and segmentation for initialization. We evaluate our approach on a publicly available dataset and demonstrate its effectiveness. In particular, our method achieves comparably high accuracy on shape estimation.