 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Volumetric Mechanical Property Fields Invariant to Resolution
Jun 16, 2026Accurate mechanical properties (or materials) Young's modulus ($E$), Poisson's ratio ($ν$) and density ($ρ$) are essential for reliable physics simulation of digital worlds, but most 3D assets lack this information. We propose AdaVoMP, a method for predicting accurate dense spatially-varying ($E$, $ν$, $ρ$) for input 3D objects across representations, improving the resolution, accuracy, and memory efficiency over the state-of-the-art. The foundation of our technique is a sparse and adaptive voxel structure SAV that efficiently represents both the input 3D shape and the material field output. We replace the fixed-voxel model of the most accurate prior method, VoMP, with a novel sparse transformer encoder-decoder model that learns to generate a unique SAV autoregressively for every input shape to represent its materials, achieving a resolution $16^3\times$ higher than prior art. Experiments show that AdaVoMP estimates more accurate volumetric properties, even with lesser test-time compute than all prior art. This allows us to convert high-resolution complex 3D objects into simulation-ready assets, resulting in realistic deformable simulations.
PPISP: Physically-Plausible Compensation and Control of Photometric Variations in Radiance Field Reconstruction
Jan 26, 2026Multi-view 3D reconstruction methods remain highly sensitive to photometric inconsistencies arising from camera optical characteristics and variations in image signal processing (ISP). Existing mitigation strategies such as per-frame latent variables or affine color corrections lack physical grounding and generalize poorly to novel views. We propose the Physically-Plausible ISP (PPISP) correction module, which disentangles camera-intrinsic and capture-dependent effects through physically based and interpretable transformations. A dedicated PPISP controller, trained on the input views, predicts ISP parameters for novel viewpoints, analogous to auto exposure and auto white balance in real cameras. This design enables realistic and fair evaluation on novel views without access to ground-truth images. PPISP achieves SoTA performance on standard benchmarks, while providing intuitive control and supporting the integration of metadata when available. The source code is available at: https://github.com/nv-tlabs/ppisp
Isaac Lab: A GPU-Accelerated Simulation Framework for Multi-Modal Robot Learning
Nov 06, 2025



We present Isaac Lab, the natural successor to Isaac Gym, which extends the paradigm of GPU-native robotics simulation into the era of large-scale multi-modal learning. Isaac Lab combines high-fidelity GPU parallel physics, photorealistic rendering, and a modular, composable architecture for designing environments and training robot policies. Beyond physics and rendering, the framework integrates actuator models, multi-frequency sensor simulation, data collection pipelines, and domain randomization tools, unifying best practices for reinforcement and imitation learning at scale within a single extensible platform. We highlight its application to a diverse set of challenges, including whole-body control, cross-embodiment mobility, contact-rich and dexterous manipulation, and the integration of human demonstrations for skill acquisition. Finally, we discuss upcoming integration with the differentiable, GPU-accelerated Newton physics engine, which promises new opportunities for scalable, data-efficient, and gradient-based approaches to robot learning. We believe Isaac Lab's combination of advanced simulation capabilities, rich sensing, and data-center scale execution will help unlock the next generation of breakthroughs in robotics research.
VoMP: Predicting Volumetric Mechanical Property Fields
Oct 27, 2025Physical simulation relies on spatially-varying mechanical properties, often laboriously hand-crafted. VoMP is a feed-forward method trained to predict Young's modulus ($E$), Poisson's ratio ($\nu$), and density ($\rho$) throughout the volume of 3D objects, in any representation that can be rendered and voxelized. VoMP aggregates per-voxel multi-view features and passes them to our trained Geometry Transformer to predict per-voxel material latent codes. These latents reside on a manifold of physically plausible materials, which we learn from a real-world dataset, guaranteeing the validity of decoded per-voxel materials. To obtain object-level training data, we propose an annotation pipeline combining knowledge from segmented 3D datasets, material databases, and a vision-language model, along with a new benchmark. Experiments show that VoMP estimates accurate volumetric properties, far outperforming prior art in accuracy and speed.
3D Gaussian Ray Tracing: Fast Tracing of Particle Scenes
Jul 10, 2024



Particle-based representations of radiance fields such as 3D Gaussian Splatting have found great success for reconstructing and re-rendering of complex scenes. Most existing methods render particles via rasterization, projecting them to screen space tiles for processing in a sorted order. This work instead considers ray tracing the particles, building a bounding volume hierarchy and casting a ray for each pixel using high-performance GPU ray tracing hardware. To efficiently handle large numbers of semi-transparent particles, we describe a specialized rendering algorithm which encapsulates particles with bounding meshes to leverage fast ray-triangle intersections, and shades batches of intersections in depth-order. The benefits of ray tracing are well-known in computer graphics: processing incoherent rays for secondary lighting effects such as shadows and reflections, rendering from highly-distorted cameras common in robotics, stochastically sampling rays, and more. With our renderer, this flexibility comes at little cost compared to rasterization. Experiments demonstrate the speed and accuracy of our approach, as well as several applications in computer graphics and vision. We further propose related improvements to the basic Gaussian representation, including a simple use of generalized kernel functions which significantly reduces particle hit counts.
DexPBT: Scaling up Dexterous Manipulation for Hand-Arm Systems with Population Based Training
May 20, 2023



In this work, we propose algorithms and methods that enable learning dexterous object manipulation using simulated one- or two-armed robots equipped with multi-fingered hand end-effectors. Using a parallel GPU-accelerated physics simulator (Isaac Gym), we implement challenging tasks for these robots, including regrasping, grasp-and-throw, and object reorientation. To solve these problems we introduce a decentralized Population-Based Training (PBT) algorithm that allows us to massively amplify the exploration capabilities of deep reinforcement learning. We find that this method significantly outperforms regular end-to-end learning and is able to discover robust control policies in challenging tasks. Video demonstrations of learned behaviors and the code can be found at https://sites.google.com/view/dexpbt
ORBIT: A Unified Simulation Framework for Interactive Robot Learning Environments
Jan 10, 2023



We present ORBIT, a unified and modular framework for robot learning powered by NVIDIA Isaac Sim. It offers a modular design to easily and efficiently create robotic environments with photo-realistic scenes and fast and accurate rigid and deformable body simulation. With ORBIT, we provide a suite of benchmark tasks of varying difficulty -- from single-stage cabinet opening and cloth folding to multi-stage tasks such as room reorganization. To support working with diverse observations and action spaces, we include fixed-arm and mobile manipulators with different physically-based sensors and motion generators. ORBIT allows training reinforcement learning policies and collecting large demonstration datasets from hand-crafted or expert solutions in a matter of minutes by leveraging GPU-based parallelization. In summary, we offer an open-sourced framework that readily comes with 16 robotic platforms, 4 sensor modalities, 10 motion generators, more than 20 benchmark tasks, and wrappers to 4 learning libraries. With this framework, we aim to support various research areas, including representation learning, reinforcement learning, imitation learning, and task and motion planning. We hope it helps establish interdisciplinary collaborations in these communities, and its modularity makes it easily extensible for more tasks and applications in the future. For videos, documentation, and code: https://isaac-orbit.github.io/.
DeXtreme: Transfer of Agile In-hand Manipulation from Simulation to Reality
Oct 25, 2022Recent work has demonstrated the ability of deep reinforcement learning (RL) algorithms to learn complex robotic behaviours in simulation, including in the domain of multi-fingered manipulation. However, such models can be challenging to transfer to the real world due to the gap between simulation and reality. In this paper, we present our techniques to train a) a policy that can perform robust dexterous manipulation on an anthropomorphic robot hand and b) a robust pose estimator suitable for providing reliable real-time information on the state of the object being manipulated. Our policies are trained to adapt to a wide range of conditions in simulation. Consequently, our vision-based policies significantly outperform the best vision policies in the literature on the same reorientation task and are competitive with policies that are given privileged state information via motion capture systems. Our work reaffirms the possibilities of sim-to-real transfer for dexterous manipulation in diverse kinds of hardware and simulator setups, and in our case, with the Allegro Hand and Isaac Gym GPU-based simulation. Furthermore, it opens up possibilities for researchers to achieve such results with commonly-available, affordable robot hands and cameras. Videos of the resulting policy and supplementary information, including experiments and demos, can be found at \url{https://dextreme.org/}
Factory: Fast Contact for Robotic Assembly
May 07, 2022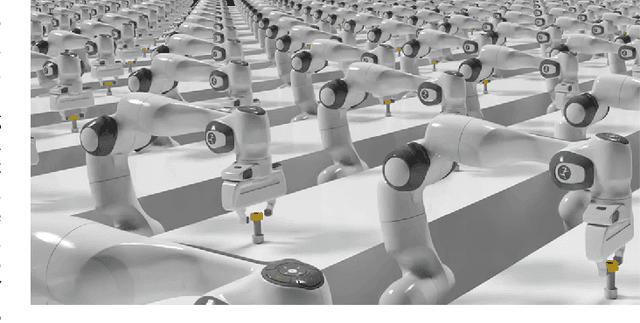
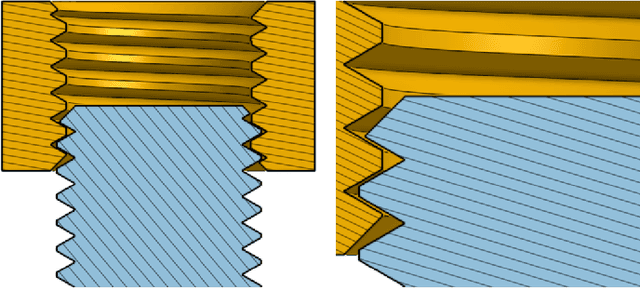
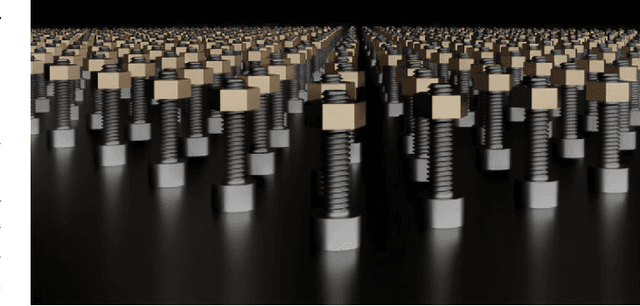
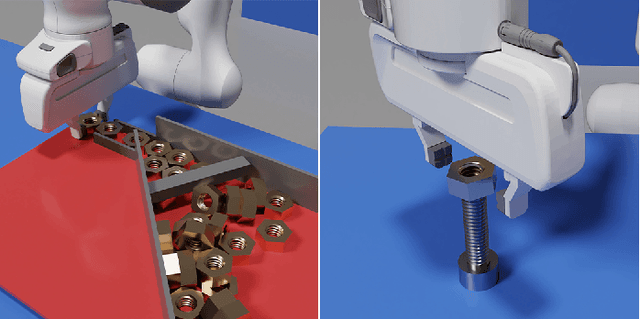
Robotic assembly is one of the oldest and most challenging applications of robotics. In other areas of robotics, such as perception and grasping, simulation has rapidly accelerated research progress, particularly when combined with modern deep learning. However, accurately, efficiently, and robustly simulating the range of contact-rich interactions in assembly remains a longstanding challenge. In this work, we present Factory, a set of physics simulation methods and robot learning tools for such applications. We achieve real-time or faster simulation of a wide range of contact-rich scenes, including simultaneous simulation of 1000 nut-and-bolt interactions. We provide $60$ carefully-designed part models, 3 robotic assembly environments, and 7 robot controllers for training and testing virtual robots. Finally, we train and evaluate proof-of-concept reinforcement learning policies for nut-and-bolt assembly. We aim for Factory to open the doors to using simulation for robotic assembly, as well as many other contact-rich applications in robotics. Please see https://sites.google.com/nvidia.com/factory for supplementary content, including videos.
Isaac Gym: High Performance GPU-Based Physics Simulation For Robot Learning
Aug 25, 2021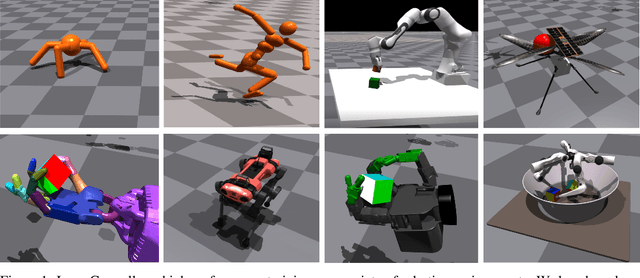
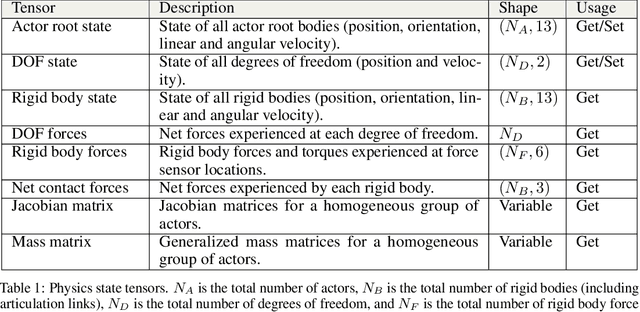
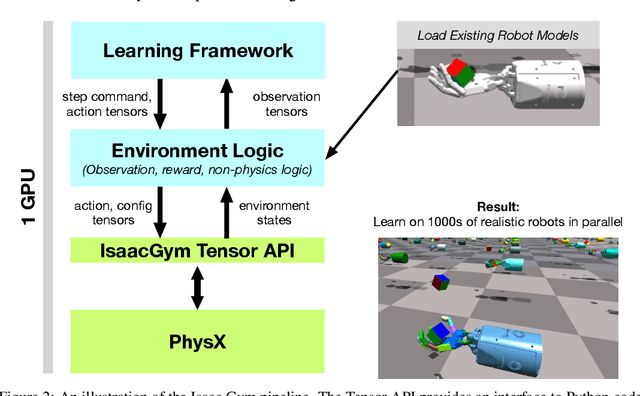
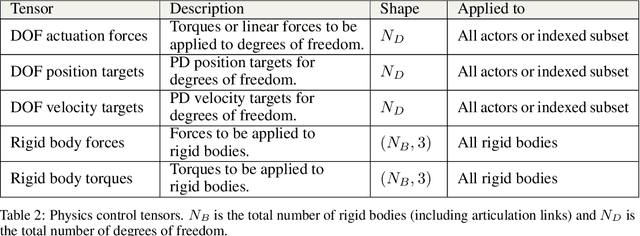
Isaac Gym offers a high performance learning platform to train policies for wide variety of robotics tasks directly on GPU. Both physics simulation and the neural network policy training reside on GPU and communicate by directly passing data from physics buffers to PyTorch tensors without ever going through any CPU bottlenecks. This leads to blazing fast training times for complex robotics tasks on a single GPU with 2-3 orders of magnitude improvements compared to conventional RL training that uses a CPU based simulator and GPU for neural networks. We host the results and videos at \url{https://sites.google.com/view/isaacgym-nvidia} and isaac gym can be downloaded at \url{https://developer.nvidia.com/isaac-gym}.