 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterpretable Pre-Release Baseball Pitch Type Anticipation from Broadcast 3D Kinematics
Mar 05, 2026How much can a pitcher's body reveal about the upcoming pitch? We study this question at scale by classifying eight pitch types from monocular 3D pose sequences, without access to ball-flight data. Our pipeline chains a diffusion-based 3D pose backbone with automatic pitching-event detection, groundtruth-validated biomechanical feature extraction, and gradient-boosted classification over 229 kinematic features. Evaluated on 119,561 professional pitches, the largest such benchmark to date, we achieve 80.4\% accuracy using body kinematics alone. A systematic importance analysis reveals that upper-body mechanics contribute 64.9\% of the predictive signal versus 35.1\% for the lower body, with wrist position (14.8\%) and trunk lateral tilt emerging as the most informative joint group and biomechanical feature, respectively. We further show that grip-defined variants (four-seam vs.\ two-seam fastball) are not separable from pose, establishing an empirical ceiling near 80\% and delineating where kinematic information ends and ball-flight information begins.
Factory: Fast Contact for Robotic Assembly
May 07, 2022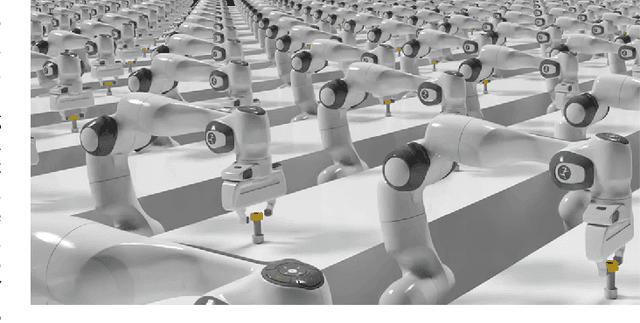
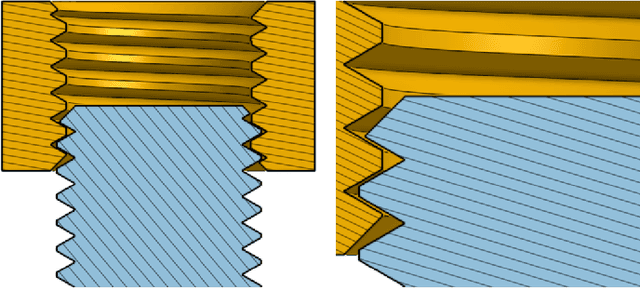
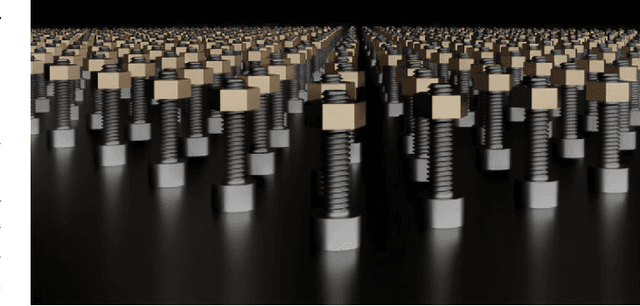
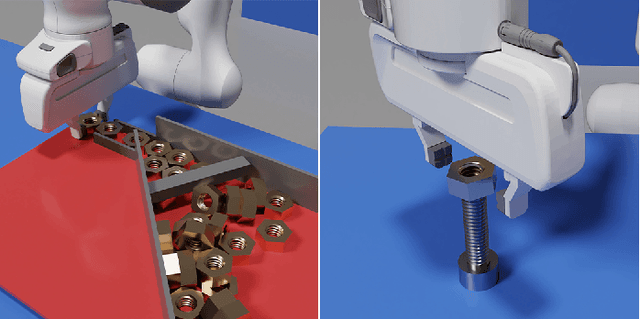
Robotic assembly is one of the oldest and most challenging applications of robotics. In other areas of robotics, such as perception and grasping, simulation has rapidly accelerated research progress, particularly when combined with modern deep learning. However, accurately, efficiently, and robustly simulating the range of contact-rich interactions in assembly remains a longstanding challenge. In this work, we present Factory, a set of physics simulation methods and robot learning tools for such applications. We achieve real-time or faster simulation of a wide range of contact-rich scenes, including simultaneous simulation of 1000 nut-and-bolt interactions. We provide $60$ carefully-designed part models, 3 robotic assembly environments, and 7 robot controllers for training and testing virtual robots. Finally, we train and evaluate proof-of-concept reinforcement learning policies for nut-and-bolt assembly. We aim for Factory to open the doors to using simulation for robotic assembly, as well as many other contact-rich applications in robotics. Please see https://sites.google.com/nvidia.com/factory for supplementary content, including videos.
Isaac Gym: High Performance GPU-Based Physics Simulation For Robot Learning
Aug 25, 2021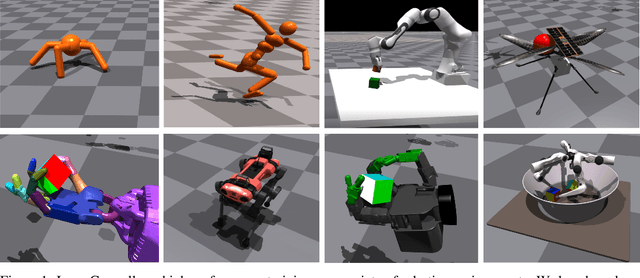
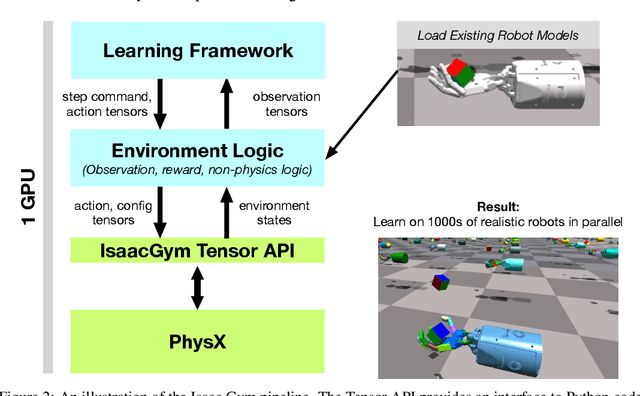
Isaac Gym offers a high performance learning platform to train policies for wide variety of robotics tasks directly on GPU. Both physics simulation and the neural network policy training reside on GPU and communicate by directly passing data from physics buffers to PyTorch tensors without ever going through any CPU bottlenecks. This leads to blazing fast training times for complex robotics tasks on a single GPU with 2-3 orders of magnitude improvements compared to conventional RL training that uses a CPU based simulator and GPU for neural networks. We host the results and videos at \url{https://sites.google.com/view/isaacgym-nvidia} and isaac gym can be downloaded at \url{https://developer.nvidia.com/isaac-gym}.