 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIsaac Lab: A GPU-Accelerated Simulation Framework for Multi-Modal Robot Learning
Nov 06, 2025



We present Isaac Lab, the natural successor to Isaac Gym, which extends the paradigm of GPU-native robotics simulation into the era of large-scale multi-modal learning. Isaac Lab combines high-fidelity GPU parallel physics, photorealistic rendering, and a modular, composable architecture for designing environments and training robot policies. Beyond physics and rendering, the framework integrates actuator models, multi-frequency sensor simulation, data collection pipelines, and domain randomization tools, unifying best practices for reinforcement and imitation learning at scale within a single extensible platform. We highlight its application to a diverse set of challenges, including whole-body control, cross-embodiment mobility, contact-rich and dexterous manipulation, and the integration of human demonstrations for skill acquisition. Finally, we discuss upcoming integration with the differentiable, GPU-accelerated Newton physics engine, which promises new opportunities for scalable, data-efficient, and gradient-based approaches to robot learning. We believe Isaac Lab's combination of advanced simulation capabilities, rich sensing, and data-center scale execution will help unlock the next generation of breakthroughs in robotics research.
SimAvatar: Simulation-Ready Avatars with Layered Hair and Clothing
Dec 12, 2024We introduce SimAvatar, a framework designed to generate simulation-ready clothed 3D human avatars from a text prompt. Current text-driven human avatar generation methods either model hair, clothing, and the human body using a unified geometry or produce hair and garments that are not easily adaptable for simulation within existing simulation pipelines. The primary challenge lies in representing the hair and garment geometry in a way that allows leveraging established prior knowledge from foundational image diffusion models (e.g., Stable Diffusion) while being simulation-ready using either physics or neural simulators. To address this task, we propose a two-stage framework that combines the flexibility of 3D Gaussians with simulation-ready hair strands and garment meshes. Specifically, we first employ three text-conditioned 3D generative models to generate garment mesh, body shape and hair strands from the given text prompt. To leverage prior knowledge from foundational diffusion models, we attach 3D Gaussians to the body mesh, garment mesh, as well as hair strands and learn the avatar appearance through optimization. To drive the avatar given a pose sequence, we first apply physics simulators onto the garment meshes and hair strands. We then transfer the motion onto 3D Gaussians through carefully designed mechanisms for each body part. As a result, our synthesized avatars have vivid texture and realistic dynamic motion. To the best of our knowledge, our method is the first to produce highly realistic, fully simulation-ready 3D avatars, surpassing the capabilities of current approaches.
UKAN: Unbound Kolmogorov-Arnold Network Accompanied with Accelerated Library
Aug 20, 2024



In this work, we present a GPU-accelerated library for the underlying components of Kolmogorov-Arnold Networks (KANs), along with an algorithm to eliminate bounded grids in KANs. The GPU-accelerated library reduces the computational complexity of Basis Spline (B-spline) evaluation by a factor of $\mathcal{O}$(grid size) compared to existing codes, enabling batch computation for large-scale learning. To overcome the limitations of traditional KANs, we introduce Unbounded KANs (UKANs), which eliminate the need for a bounded grid and a fixed number of B-spline coefficients. To do so, we replace the KAN parameters (B-spline coefficients) with a coefficient generator (CG) model. The inputs to the CG model are designed based on the idea of an infinite symmetric grid extending from negative infinity to positive infinity. The positional encoding of grid group, a sequential collection of B-spline grid indexes, is fed into the CG model, and coefficients are consumed by the efficient implementation (matrix representations) of B-spline functions to generate outputs. We perform several experiments on regression, classification, and generative tasks, which are promising. In particular, UKAN does not require data normalization or a bounded domain for evaluation. Additionally, our benchmarking results indicate the superior memory and computational efficiency of our library compared to existing codes.
HandyPriors: Physically Consistent Perception of Hand-Object Interactions with Differentiable Priors
Dec 03, 2023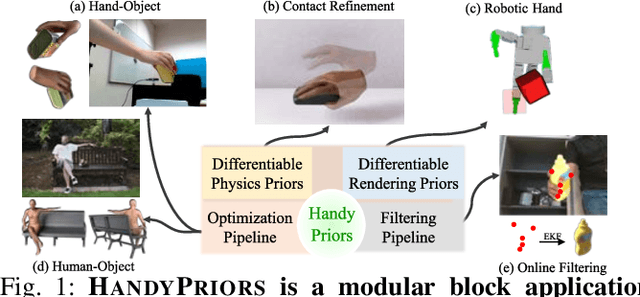
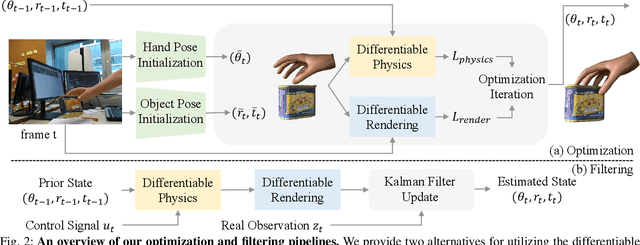
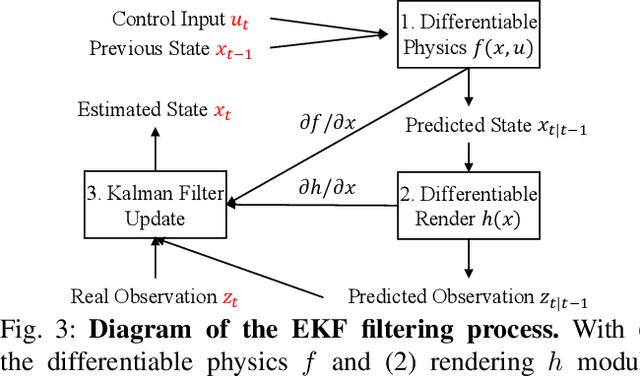
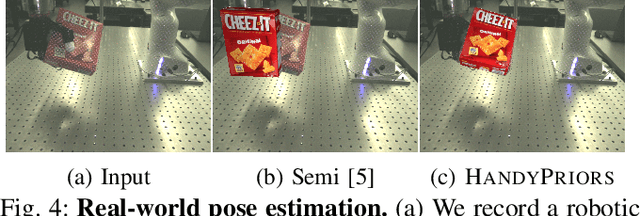
Various heuristic objectives for modeling hand-object interaction have been proposed in past work. However, due to the lack of a cohesive framework, these objectives often possess a narrow scope of applicability and are limited by their efficiency or accuracy. In this paper, we propose HandyPriors, a unified and general pipeline for pose estimation in human-object interaction scenes by leveraging recent advances in differentiable physics and rendering. Our approach employs rendering priors to align with input images and segmentation masks along with physics priors to mitigate penetration and relative-sliding across frames. Furthermore, we present two alternatives for hand and object pose estimation. The optimization-based pose estimation achieves higher accuracy, while the filtering-based tracking, which utilizes the differentiable priors as dynamics and observation models, executes faster. We demonstrate that HandyPriors attains comparable or superior results in the pose estimation task, and that the differentiable physics module can predict contact information for pose refinement. We also show that our approach generalizes to perception tasks, including robotic hand manipulation and human-object pose estimation in the wild.
Fast-Grasp'D: Dexterous Multi-finger Grasp Generation Through Differentiable Simulation
Jun 13, 2023



Multi-finger grasping relies on high quality training data, which is hard to obtain: human data is hard to transfer and synthetic data relies on simplifying assumptions that reduce grasp quality. By making grasp simulation differentiable, and contact dynamics amenable to gradient-based optimization, we accelerate the search for high-quality grasps with fewer limiting assumptions. We present Grasp'D-1M: a large-scale dataset for multi-finger robotic grasping, synthesized with Fast- Grasp'D, a novel differentiable grasping simulator. Grasp'D- 1M contains one million training examples for three robotic hands (three, four and five-fingered), each with multimodal visual inputs (RGB+depth+segmentation, available in mono and stereo). Grasp synthesis with Fast-Grasp'D is 10x faster than GraspIt! and 20x faster than the prior Grasp'D differentiable simulator. Generated grasps are more stable and contact-rich than GraspIt! grasps, regardless of the distance threshold used for contact generation. We validate the usefulness of our dataset by retraining an existing vision-based grasping pipeline on Grasp'D-1M, and showing a dramatic increase in model performance, predicting grasps with 30% more contact, a 33% higher epsilon metric, and 35% lower simulated displacement. Additional details at https://dexgrasp.github.io.
Grasp'D: Differentiable Contact-rich Grasp Synthesis for Multi-fingered Hands
Aug 26, 2022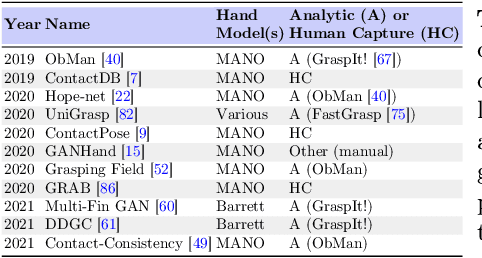

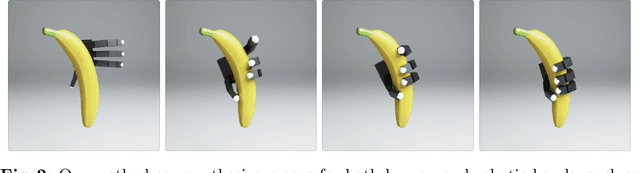
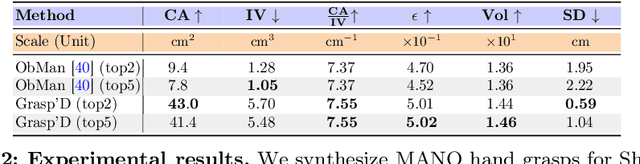
The study of hand-object interaction requires generating viable grasp poses for high-dimensional multi-finger models, often relying on analytic grasp synthesis which tends to produce brittle and unnatural results. This paper presents Grasp'D, an approach for grasp synthesis with a differentiable contact simulation from both known models as well as visual inputs. We use gradient-based methods as an alternative to sampling-based grasp synthesis, which fails without simplifying assumptions, such as pre-specified contact locations and eigengrasps. Such assumptions limit grasp discovery and, in particular, exclude high-contact power grasps. In contrast, our simulation-based approach allows for stable, efficient, physically realistic, high-contact grasp synthesis, even for gripper morphologies with high-degrees of freedom. We identify and address challenges in making grasp simulation amenable to gradient-based optimization, such as non-smooth object surface geometry, contact sparsity, and a rugged optimization landscape. Grasp'D compares favorably to analytic grasp synthesis on human and robotic hand models, and resultant grasps achieve over 4x denser contact, leading to significantly higher grasp stability. Video and code available at https://graspd-eccv22.github.io/.
Factory: Fast Contact for Robotic Assembly
May 07, 2022
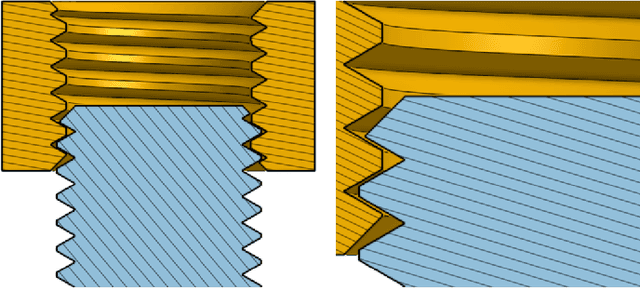
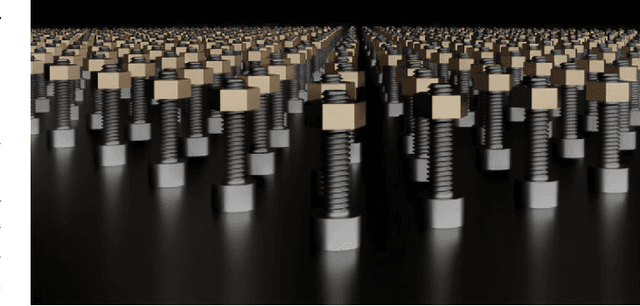
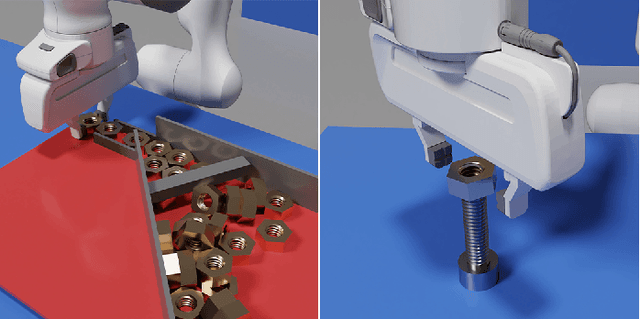
Robotic assembly is one of the oldest and most challenging applications of robotics. In other areas of robotics, such as perception and grasping, simulation has rapidly accelerated research progress, particularly when combined with modern deep learning. However, accurately, efficiently, and robustly simulating the range of contact-rich interactions in assembly remains a longstanding challenge. In this work, we present Factory, a set of physics simulation methods and robot learning tools for such applications. We achieve real-time or faster simulation of a wide range of contact-rich scenes, including simultaneous simulation of 1000 nut-and-bolt interactions. We provide $60$ carefully-designed part models, 3 robotic assembly environments, and 7 robot controllers for training and testing virtual robots. Finally, we train and evaluate proof-of-concept reinforcement learning policies for nut-and-bolt assembly. We aim for Factory to open the doors to using simulation for robotic assembly, as well as many other contact-rich applications in robotics. Please see https://sites.google.com/nvidia.com/factory for supplementary content, including videos.
Accelerated Policy Learning with Parallel Differentiable Simulation
Apr 14, 2022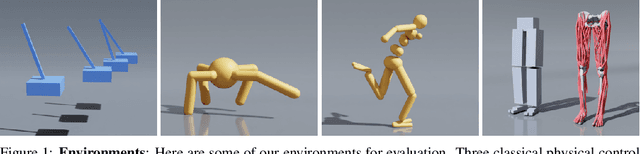
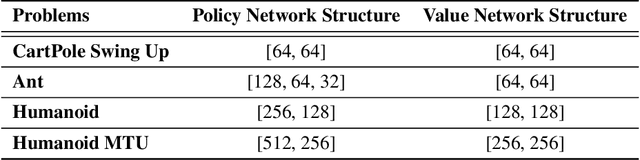
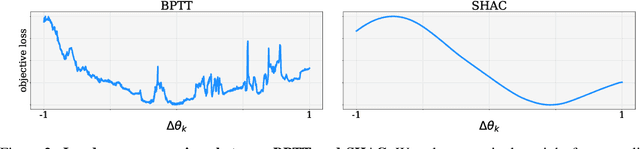
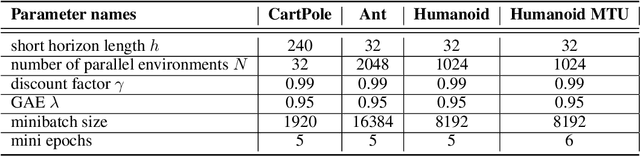
Deep reinforcement learning can generate complex control policies, but requires large amounts of training data to work effectively. Recent work has attempted to address this issue by leveraging differentiable simulators. However, inherent problems such as local minima and exploding/vanishing numerical gradients prevent these methods from being generally applied to control tasks with complex contact-rich dynamics, such as humanoid locomotion in classical RL benchmarks. In this work we present a high-performance differentiable simulator and a new policy learning algorithm (SHAC) that can effectively leverage simulation gradients, even in the presence of non-smoothness. Our learning algorithm alleviates problems with local minima through a smooth critic function, avoids vanishing/exploding gradients through a truncated learning window, and allows many physical environments to be run in parallel. We evaluate our method on classical RL control tasks, and show substantial improvements in sample efficiency and wall-clock time over state-of-the-art RL and differentiable simulation-based algorithms. In addition, we demonstrate the scalability of our method by applying it to the challenging high-dimensional problem of muscle-actuated locomotion with a large action space, achieving a greater than 17x reduction in training time over the best-performing established RL algorithm.
DefGraspSim: Physics-based simulation of grasp outcomes for 3D deformable objects
Mar 21, 2022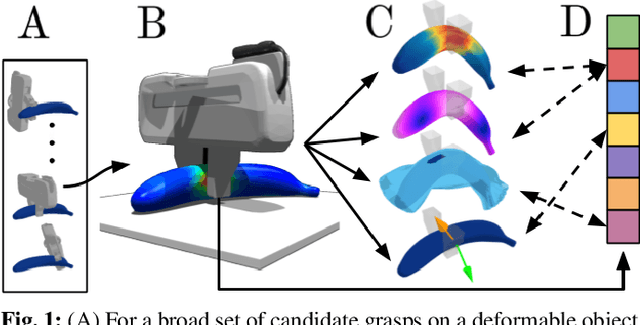

Robotic grasping of 3D deformable objects (e.g., fruits/vegetables, internal organs, bottles/boxes) is critical for real-world applications such as food processing, robotic surgery, and household automation. However, developing grasp strategies for such objects is uniquely challenging. Unlike rigid objects, deformable objects have infinite degrees of freedom and require field quantities (e.g., deformation, stress) to fully define their state. As these quantities are not easily accessible in the real world, we propose studying interaction with deformable objects through physics-based simulation. As such, we simulate grasps on a wide range of 3D deformable objects using a GPU-based implementation of the corotational finite element method (FEM). To facilitate future research, we open-source our simulated dataset (34 objects, 1e5 Pa elasticity range, 6800 grasp evaluations, 1.1M grasp measurements), as well as a code repository that allows researchers to run our full FEM-based grasp evaluation pipeline on arbitrary 3D object models of their choice. Finally, we demonstrate good correspondence between grasp outcomes on simulated objects and their real counterparts.
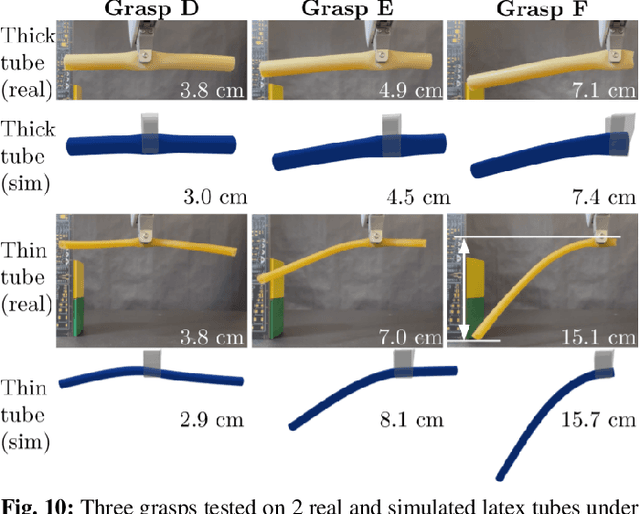
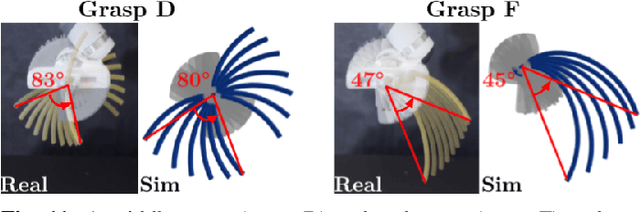
DiSECt: A Differentiable Simulator for Parameter Inference and Control in Robotic Cutting
Mar 19, 2022
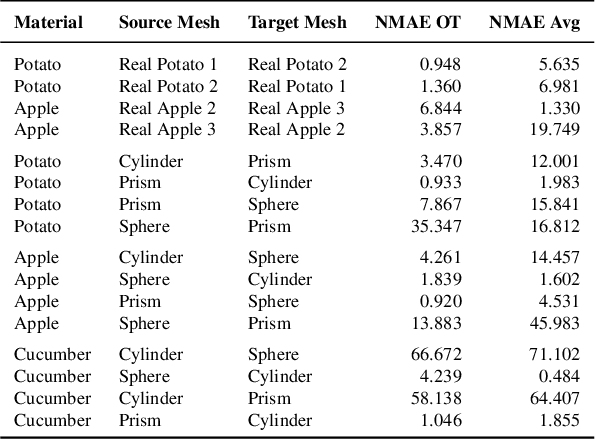
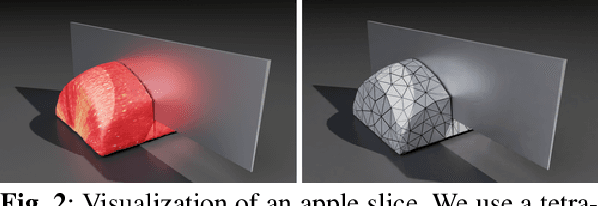
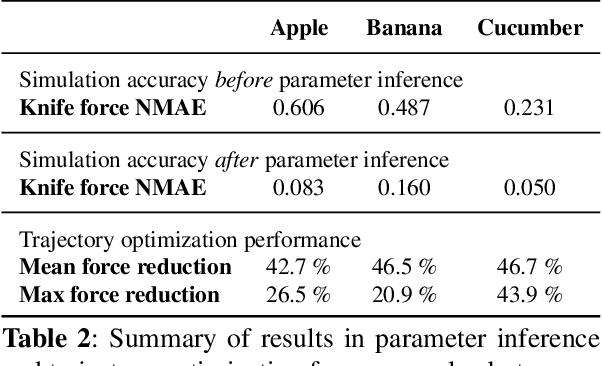
Robotic cutting of soft materials is critical for applications such as food processing, household automation, and surgical manipulation. As in other areas of robotics, simulators can facilitate controller verification, policy learning, and dataset generation. Moreover, differentiable simulators can enable gradient-based optimization, which is invaluable for calibrating simulation parameters and optimizing controllers. In this work, we present DiSECt: the first differentiable simulator for cutting soft materials. The simulator augments the finite element method (FEM) with a continuous contact model based on signed distance fields (SDF), as well as a continuous damage model that inserts springs on opposite sides of the cutting plane and allows them to weaken until zero stiffness, enabling crack formation. Through various experiments, we evaluate the performance of the simulator. We first show that the simulator can be calibrated to match resultant forces and deformation fields from a state-of-the-art commercial solver and real-world cutting datasets, with generality across cutting velocities and object instances. We then show that Bayesian inference can be performed efficiently by leveraging the differentiability of the simulator, estimating posteriors over hundreds of parameters in a fraction of the time of derivative-free methods. Next, we illustrate that control parameters in the simulation can be optimized to minimize cutting forces via lateral slicing motions. Finally, we conduct experiments on a real robot arm equipped with a slicing knife to infer simulation parameters from force measurements. By optimizing the slicing motion of the knife, we show on fruit cutting scenarios that the average knife force can be reduced by more than 40% compared to a vertical cutting motion. We publish code and additional materials on our project website at https://diff-cutting-sim.github.io.