 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVAE-REPA: Variational Autoencoder Representation Alignment for Efficient Diffusion Training
Jan 25, 2026Denoising-based diffusion transformers, despite their strong generation performance, suffer from inefficient training convergence. Existing methods addressing this issue, such as REPA (relying on external representation encoders) or SRA (requiring dual-model setups), inevitably incur heavy computational overhead during training due to external dependencies. To tackle these challenges, this paper proposes \textbf{\namex}, a lightweight intrinsic guidance framework for efficient diffusion training. \name leverages off-the-shelf pre-trained Variational Autoencoder (VAE) features: their reconstruction property ensures inherent encoding of visual priors like rich texture details, structural patterns, and basic semantic information. Specifically, \name aligns the intermediate latent features of diffusion transformers with VAE features via a lightweight projection layer, supervised by a feature alignment loss. This design accelerates training without extra representation encoders or dual-model maintenance, resulting in a simple yet effective pipeline. Extensive experiments demonstrate that \name improves both generation quality and training convergence speed compared to vanilla diffusion transformers, matches or outperforms state-of-the-art acceleration methods, and incurs merely 4\% extra GFLOPs with zero additional cost for external guidance models.
BEDA: Belief Estimation as Probabilistic Constraints for Performing Strategic Dialogue Acts
Dec 31, 2025Strategic dialogue requires agents to execute distinct dialogue acts, for which belief estimation is essential. While prior work often estimates beliefs accurately, it lacks a principled mechanism to use those beliefs during generation. We bridge this gap by first formalizing two core acts Adversarial and Alignment, and by operationalizing them via probabilistic constraints on what an agent may generate. We instantiate this idea in BEDA, a framework that consists of the world set, the belief estimator for belief estimation, and the conditional generator that selects acts and realizes utterances consistent with the inferred beliefs. Across three settings, Conditional Keeper Burglar (CKBG, adversarial), Mutual Friends (MF, cooperative), and CaSiNo (negotiation), BEDA consistently outperforms strong baselines: on CKBG it improves success rate by at least 5.0 points across backbones and by 20.6 points with GPT-4.1-nano; on Mutual Friends it achieves an average improvement of 9.3 points; and on CaSiNo it achieves the optimal deal relative to all baselines. These results indicate that casting belief estimation as constraints provides a simple, general mechanism for reliable strategic dialogue.
Distribution Matching Distillation Meets Reinforcement Learning
Nov 19, 2025Distribution Matching Distillation (DMD) distills a pre-trained multi-step diffusion model to a few-step one to improve inference efficiency. However, the performance of the latter is often capped by the former. To circumvent this dilemma, we propose DMDR, a novel framework that combines Reinforcement Learning (RL) techniques into the distillation process. We show that for the RL of the few-step generator, the DMD loss itself is a more effective regularization compared to the traditional ones. In turn, RL can help to guide the mode coverage process in DMD more effectively. These allow us to unlock the capacity of the few-step generator by conducting distillation and RL simultaneously. Meanwhile, we design the dynamic distribution guidance and dynamic renoise sampling training strategies to improve the initial distillation process. The experiments demonstrate that DMDR can achieve leading visual quality, prompt coherence among few-step methods, and even exhibit performance that exceeds the multi-step teacher.
Improving Region Representation Learning from Urban Imagery with Noisy Long-Caption Supervision
Nov 10, 2025Region representation learning plays a pivotal role in urban computing by extracting meaningful features from unlabeled urban data. Analogous to how perceived facial age reflects an individual's health, the visual appearance of a city serves as its ``portrait", encapsulating latent socio-economic and environmental characteristics. Recent studies have explored leveraging Large Language Models (LLMs) to incorporate textual knowledge into imagery-based urban region representation learning. However, two major challenges remain: i)~difficulty in aligning fine-grained visual features with long captions, and ii) suboptimal knowledge incorporation due to noise in LLM-generated captions. To address these issues, we propose a novel pre-training framework called UrbanLN that improves Urban region representation learning through Long-text awareness and Noise suppression. Specifically, we introduce an information-preserved stretching interpolation strategy that aligns long captions with fine-grained visual semantics in complex urban scenes. To effectively mine knowledge from LLM-generated captions and filter out noise, we propose a dual-level optimization strategy. At the data level, a multi-model collaboration pipeline automatically generates diverse and reliable captions without human intervention. At the model level, we employ a momentum-based self-distillation mechanism to generate stable pseudo-targets, facilitating robust cross-modal learning under noisy conditions. Extensive experiments across four real-world cities and various downstream tasks demonstrate the superior performance of our UrbanLN.
Lumina-mGPT 2.0: Stand-Alone AutoRegressive Image Modeling
Jul 23, 2025
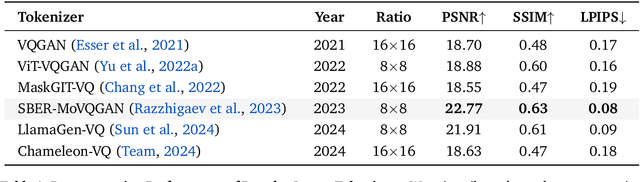
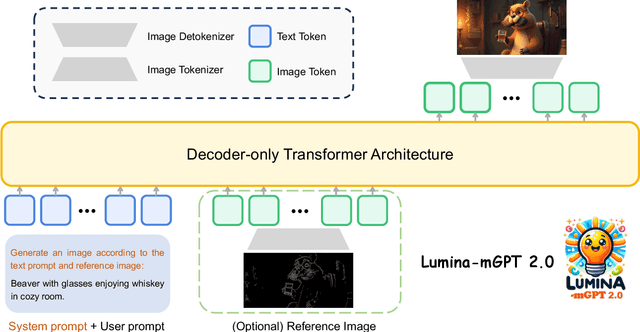

We present Lumina-mGPT 2.0, a stand-alone, decoder-only autoregressive model that revisits and revitalizes the autoregressive paradigm for high-quality image generation and beyond. Unlike existing approaches that rely on pretrained components or hybrid architectures, Lumina-mGPT 2.0 is trained entirely from scratch, enabling unrestricted architectural design and licensing freedom. It achieves generation quality on par with state-of-the-art diffusion models such as DALL-E 3 and SANA, while preserving the inherent flexibility and compositionality of autoregressive modeling. Our unified tokenization scheme allows the model to seamlessly handle a wide spectrum of tasks-including subject-driven generation, image editing, controllable synthesis, and dense prediction-within a single generative framework. To further boost usability, we incorporate efficient decoding strategies like inference-time scaling and speculative Jacobi sampling to improve quality and speed, respectively. Extensive evaluations on standard text-to-image benchmarks (e.g., GenEval, DPG) demonstrate that Lumina-mGPT 2.0 not only matches but in some cases surpasses diffusion-based models. Moreover, we confirm its multi-task capabilities on the Graph200K benchmark, with the native Lumina-mGPT 2.0 performing exceptionally well. These results position Lumina-mGPT 2.0 as a strong, flexible foundation model for unified multimodal generation. We have released our training details, code, and models at https://github.com/Alpha-VLLM/Lumina-mGPT-2.0.
EuroCon: Benchmarking Parliament Deliberation for Political Consensus Finding
May 26, 2025Achieving political consensus is crucial yet challenging for the effective functioning of social governance. However, although frontier AI systems represented by large language models (LLMs) have developed rapidly in recent years, their capabilities on this scope are still understudied. In this paper, we introduce EuroCon, a novel benchmark constructed from 2,225 high-quality deliberation records of the European Parliament over 13 years, ranging from 2009 to 2022, to evaluate the ability of LLMs to reach political consensus among divergent party positions across diverse parliament settings. Specifically, EuroCon incorporates four factors to build each simulated parliament setting: specific political issues, political goals, participating parties, and power structures based on seat distribution. We also develop an evaluation framework for EuroCon to simulate real voting outcomes in different parliament settings, assessing whether LLM-generated resolutions meet predefined political goals. Our experimental results demonstrate that even state-of-the-art models remain undersatisfied with complex tasks like passing resolutions by a two-thirds majority and addressing security issues, while revealing some common strategies LLMs use to find consensus under different power structures, such as prioritizing the stance of the dominant party, highlighting EuroCon's promise as an effective platform for studying LLMs' ability to find political consensus.
Instructing Text-to-Image Diffusion Models via Classifier-Guided Semantic Optimization
May 20, 2025Text-to-image diffusion models have emerged as powerful tools for high-quality image generation and editing. Many existing approaches rely on text prompts as editing guidance. However, these methods are constrained by the need for manual prompt crafting, which can be time-consuming, introduce irrelevant details, and significantly limit editing performance. In this work, we propose optimizing semantic embeddings guided by attribute classifiers to steer text-to-image models toward desired edits, without relying on text prompts or requiring any training or fine-tuning of the diffusion model. We utilize classifiers to learn precise semantic embeddings at the dataset level. The learned embeddings are theoretically justified as the optimal representation of attribute semantics, enabling disentangled and accurate edits. Experiments further demonstrate that our method achieves high levels of disentanglement and strong generalization across different domains of data.
No Other Representation Component Is Needed: Diffusion Transformers Can Provide Representation Guidance by Themselves
May 05, 2025Recent studies have demonstrated that learning a meaningful internal representation can both accelerate generative training and enhance generation quality of the diffusion transformers. However, existing approaches necessitate to either introduce an additional and complex representation training framework or rely on a large-scale, pre-trained representation foundation model to provide representation guidance during the original generative training process. In this study, we posit that the unique discriminative process inherent to diffusion transformers enables them to offer such guidance without requiring external representation components. We therefore propose Self-Representation A}lignment (SRA), a simple yet straightforward method that obtain representation guidance through a self-distillation manner. Specifically, SRA aligns the output latent representation of the diffusion transformer in earlier layer with higher noise to that in later layer with lower noise to progressively enhance the overall representation learning during only generative training process. Experimental results indicate that applying SRA to DiTs and SiTs yields consistent performance improvements. Moreover, SRA not only significantly outperforms approaches relying on auxiliary, complex representation training frameworks but also achieves performance comparable to methods that heavily dependent on powerful external representation priors.
AffordanceSAM: Segment Anything Once More in Affordance Grounding
Apr 22, 2025Improving the generalization ability of an affordance grounding model to recognize regions for unseen objects and affordance functions is crucial for real-world application. However, current models are still far away from such standards. To address this problem, we introduce AffordanceSAM, an effective approach that extends SAM's generalization capacity to the domain of affordance grounding. For the purpose of thoroughly transferring SAM's robust performance in segmentation to affordance, we initially propose an affordance-adaption module in order to help modify SAM's segmentation output to be adapted to the specific functional regions required for affordance grounding. We concurrently make a coarse-to-fine training recipe to make SAM first be aware of affordance objects and actions coarsely, and then be able to generate affordance heatmaps finely. Both quantitative and qualitative experiments show the strong generalization capacity of our AffordanceSAM, which not only surpasses previous methods under AGD20K benchmark but also shows evidence to handle the task with novel objects and affordance functions.
Probing and Inducing Combinational Creativity in Vision-Language Models
Apr 17, 2025The ability to combine existing concepts into novel ideas stands as a fundamental hallmark of human intelligence. Recent advances in Vision-Language Models (VLMs) like GPT-4V and DALLE-3 have sparked debate about whether their outputs reflect combinational creativity--defined by M. A. Boden (1998) as synthesizing novel ideas through combining existing concepts--or sophisticated pattern matching of training data. Drawing inspiration from cognitive science, we investigate the combinational creativity of VLMs from the lens of concept blending. We propose the Identification-Explanation-Implication (IEI) framework, which decomposes creative processes into three levels: identifying input spaces, extracting shared attributes, and deriving novel semantic implications. To validate this framework, we curate CreativeMashup, a high-quality dataset of 666 artist-generated visual mashups annotated according to the IEI framework. Through extensive experiments, we demonstrate that in comprehension tasks, best VLMs have surpassed average human performance while falling short of expert-level understanding; in generation tasks, incorporating our IEI framework into the generation pipeline significantly enhances the creative quality of VLMs outputs. Our findings establish both a theoretical foundation for evaluating artificial creativity and practical guidelines for improving creative generation in VLMs.