 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBaichuan-Omni-1.5 Technical Report
Jan 26, 2025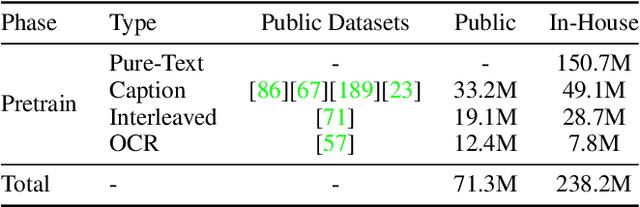
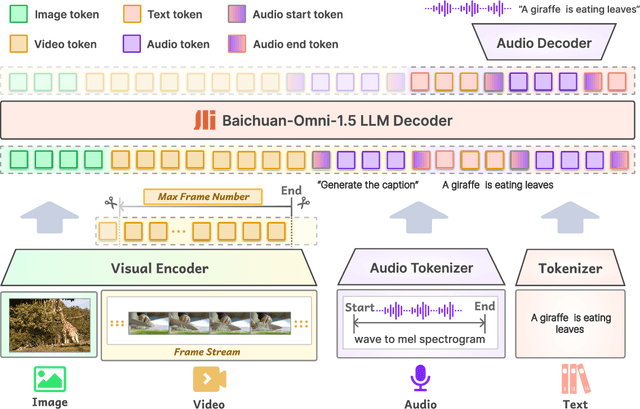
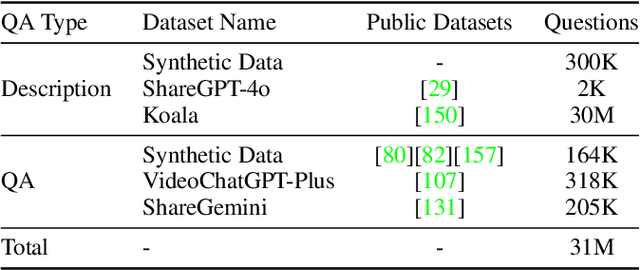
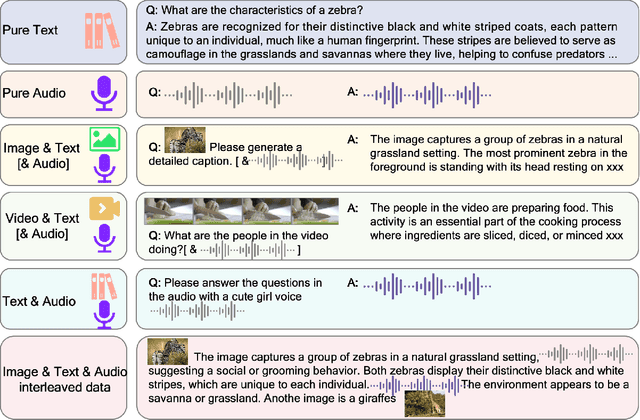
We introduce Baichuan-Omni-1.5, an omni-modal model that not only has omni-modal understanding capabilities but also provides end-to-end audio generation capabilities. To achieve fluent and high-quality interaction across modalities without compromising the capabilities of any modality, we prioritized optimizing three key aspects. First, we establish a comprehensive data cleaning and synthesis pipeline for multimodal data, obtaining about 500B high-quality data (text, audio, and vision). Second, an audio-tokenizer (Baichuan-Audio-Tokenizer) has been designed to capture both semantic and acoustic information from audio, enabling seamless integration and enhanced compatibility with MLLM. Lastly, we designed a multi-stage training strategy that progressively integrates multimodal alignment and multitask fine-tuning, ensuring effective synergy across all modalities. Baichuan-Omni-1.5 leads contemporary models (including GPT4o-mini and MiniCPM-o 2.6) in terms of comprehensive omni-modal capabilities. Notably, it achieves results comparable to leading models such as Qwen2-VL-72B across various multimodal medical benchmarks.
DI-BENCH: Benchmarking Large Language Models on Dependency Inference with Testable Repositories at Scale
Jan 23, 2025Large Language Models have advanced automated software development, however, it remains a challenge to correctly infer dependencies, namely, identifying the internal components and external packages required for a repository to successfully run. Existing studies highlight that dependency-related issues cause over 40\% of observed runtime errors on the generated repository. To address this, we introduce DI-BENCH, a large-scale benchmark and evaluation framework specifically designed to assess LLMs' capability on dependency inference. The benchmark features 581 repositories with testing environments across Python, C#, Rust, and JavaScript. Extensive experiments with textual and execution-based metrics reveal that the current best-performing model achieves only a 42.9% execution pass rate, indicating significant room for improvement. DI-BENCH establishes a new viewpoint for evaluating LLM performance on repositories, paving the way for more robust end-to-end software synthesis.
Towards Lightweight and Stable Zero-shot TTS with Self-distilled Representation Disentanglement
Jan 15, 2025Zero-shot Text-To-Speech (TTS) synthesis shows great promise for personalized voice customization through voice cloning. However, current methods for achieving zero-shot TTS heavily rely on large model scales and extensive training datasets to ensure satisfactory performance and generalizability across various speakers. This raises concerns regarding both deployment costs and data security. In this paper, we present a lightweight and stable zero-shot TTS system. We introduce a novel TTS architecture designed to effectively model linguistic content and various speaker attributes from source speech and prompt speech, respectively. Furthermore, we present a two-stage self-distillation framework that constructs parallel data pairs for effectively disentangling linguistic content and speakers from the perspective of training data. Extensive experiments show that our system exhibits excellent performance and superior stability on the zero-shot TTS tasks. Moreover, it shows markedly superior computational efficiency, with RTFs of 0.13 and 0.012 on the CPU and GPU, respectively.
SWE-Fixer: Training Open-Source LLMs for Effective and Efficient GitHub Issue Resolution
Jan 09, 2025



Large Language Models (LLMs) have demonstrated remarkable proficiency across a variety of complex tasks. One significant application of LLMs is in tackling software engineering challenges, particularly in resolving real-world tasks on GitHub by fixing code based on the issues reported by the users. However, many current approaches rely on proprietary LLMs, which limits reproducibility, accessibility, and transparency. The critical components of LLMs for addressing software engineering issues and how their capabilities can be effectively enhanced remain unclear. To address these challenges, we introduce SWE-Fixer, a novel open-source LLM designed to effectively and efficiently resolve GitHub issues. SWE-Fixer comprises two essential modules: a code file retrieval module and a code editing module. The retrieval module employs BM25 along with a lightweight LLM model to achieve coarse-to-fine file retrieval. Subsequently, the code editing module utilizes the other LLM model to generate patches for the identified files. Then, to mitigate the lack of publicly available datasets, we compile an extensive dataset that includes 110K GitHub issues along with their corresponding patches, and train the two modules of SWE-Fixer separately. We assess our approach on the SWE-Bench Lite and Verified benchmarks, achieving state-of-the-art performance among open-source models with scores of 23.3% and 30.2%, respectively. These outcomes highlight the efficacy of our approach. We will make our model, dataset, and code publicly available at https://github.com/InternLM/SWE-Fixer.
GraphDART: Graph Distillation for Efficient Advanced Persistent Threat Detection
Jan 06, 2025



Cyber-physical-social systems (CPSSs) have emerged in many applications over recent decades, requiring increased attention to security concerns. The rise of sophisticated threats like Advanced Persistent Threats (APTs) makes ensuring security in CPSSs particularly challenging. Provenance graph analysis has proven effective for tracing and detecting anomalies within systems, but the sheer size and complexity of these graphs hinder the efficiency of existing methods, especially those relying on graph neural networks (GNNs). To address these challenges, we present GraphDART, a modular framework designed to distill provenance graphs into compact yet informative representations, enabling scalable and effective anomaly detection. GraphDART can take advantage of diverse graph distillation techniques, including classic and modern graph distillation methods, to condense large provenance graphs while preserving essential structural and contextual information. This approach significantly reduces computational overhead, allowing GNNs to learn from distilled graphs efficiently and enhance detection performance. Extensive evaluations on benchmark datasets demonstrate the robustness of GraphDART in detecting malicious activities across cyber-physical-social systems. By optimizing computational efficiency, GraphDART provides a scalable and practical solution to safeguard interconnected environments against APTs.
Graph2text or Graph2token: A Perspective of Large Language Models for Graph Learning
Jan 02, 2025



Graphs are data structures used to represent irregular networks and are prevalent in numerous real-world applications. Previous methods directly model graph structures and achieve significant success. However, these methods encounter bottlenecks due to the inherent irregularity of graphs. An innovative solution is converting graphs into textual representations, thereby harnessing the powerful capabilities of Large Language Models (LLMs) to process and comprehend graphs. In this paper, we present a comprehensive review of methodologies for applying LLMs to graphs, termed LLM4graph. The core of LLM4graph lies in transforming graphs into texts for LLMs to understand and analyze. Thus, we propose a novel taxonomy of LLM4graph methods in the view of the transformation. Specifically, existing methods can be divided into two paradigms: Graph2text and Graph2token, which transform graphs into texts or tokens as the input of LLMs, respectively. We point out four challenges during the transformation to systematically present existing methods in a problem-oriented perspective. For practical concerns, we provide a guideline for researchers on selecting appropriate models and LLMs for different graphs and hardware constraints. We also identify five future research directions for LLM4graph.
NumbOD: A Spatial-Frequency Fusion Attack Against Object Detectors
Dec 22, 2024With the advancement of deep learning, object detectors (ODs) with various architectures have achieved significant success in complex scenarios like autonomous driving. Previous adversarial attacks against ODs have been focused on designing customized attacks targeting their specific structures (e.g., NMS and RPN), yielding some results but simultaneously constraining their scalability. Moreover, most efforts against ODs stem from image-level attacks originally designed for classification tasks, resulting in redundant computations and disturbances in object-irrelevant areas (e.g., background). Consequently, how to design a model-agnostic efficient attack to comprehensively evaluate the vulnerabilities of ODs remains challenging and unresolved. In this paper, we propose NumbOD, a brand-new spatial-frequency fusion attack against various ODs, aimed at disrupting object detection within images. We directly leverage the features output by the OD without relying on its internal structures to craft adversarial examples. Specifically, we first design a dual-track attack target selection strategy to select high-quality bounding boxes from OD outputs for targeting. Subsequently, we employ directional perturbations to shift and compress predicted boxes and change classification results to deceive ODs. Additionally, we focus on manipulating the high-frequency components of images to confuse ODs' attention on critical objects, thereby enhancing the attack efficiency. Our extensive experiments on nine ODs and two datasets show that NumbOD achieves powerful attack performance and high stealthiness.
Large Language Model-Brained GUI Agents: A Survey
Dec 03, 2024



GUIs have long been central to human-computer interaction, providing an intuitive and visually-driven way to access and interact with digital systems. The advent of LLMs, particularly multimodal models, has ushered in a new era of GUI automation. They have demonstrated exceptional capabilities in natural language understanding, code generation, and visual processing. This has paved the way for a new generation of LLM-brained GUI agents capable of interpreting complex GUI elements and autonomously executing actions based on natural language instructions. These agents represent a paradigm shift, enabling users to perform intricate, multi-step tasks through simple conversational commands. Their applications span across web navigation, mobile app interactions, and desktop automation, offering a transformative user experience that revolutionizes how individuals interact with software. This emerging field is rapidly advancing, with significant progress in both research and industry. To provide a structured understanding of this trend, this paper presents a comprehensive survey of LLM-brained GUI agents, exploring their historical evolution, core components, and advanced techniques. We address research questions such as existing GUI agent frameworks, the collection and utilization of data for training specialized GUI agents, the development of large action models tailored for GUI tasks, and the evaluation metrics and benchmarks necessary to assess their effectiveness. Additionally, we examine emerging applications powered by these agents. Through a detailed analysis, this survey identifies key research gaps and outlines a roadmap for future advancements in the field. By consolidating foundational knowledge and state-of-the-art developments, this work aims to guide both researchers and practitioners in overcoming challenges and unlocking the full potential of LLM-brained GUI agents.
LogiCity: Advancing Neuro-Symbolic AI with Abstract Urban Simulation
Nov 01, 2024



Recent years have witnessed the rapid development of Neuro-Symbolic (NeSy) AI systems, which integrate symbolic reasoning into deep neural networks. However, most of the existing benchmarks for NeSy AI fail to provide long-horizon reasoning tasks with complex multi-agent interactions. Furthermore, they are usually constrained by fixed and simplistic logical rules over limited entities, making them far from real-world complexities. To address these crucial gaps, we introduce LogiCity, the first simulator based on customizable first-order logic (FOL) for an urban-like environment with multiple dynamic agents. LogiCity models diverse urban elements using semantic and spatial concepts, such as IsAmbulance(X) and IsClose(X, Y). These concepts are used to define FOL rules that govern the behavior of various agents. Since the concepts and rules are abstractions, they can be universally applied to cities with any agent compositions, facilitating the instantiation of diverse scenarios. Besides, a key feature of LogiCity is its support for user-configurable abstractions, enabling customizable simulation complexities for logical reasoning. To explore various aspects of NeSy AI, LogiCity introduces two tasks, one features long-horizon sequential decision-making, and the other focuses on one-step visual reasoning, varying in difficulty and agent behaviors. Our extensive evaluation reveals the advantage of NeSy frameworks in abstract reasoning. Moreover, we highlight the significant challenges of handling more complex abstractions in long-horizon multi-agent scenarios or under high-dimensional, imbalanced data. With its flexible design, various features, and newly raised challenges, we believe LogiCity represents a pivotal step forward in advancing the next generation of NeSy AI. All the code and data are open-sourced at our website.
Passenger hazard perception based on EEG signals for highly automated driving vehicles
Aug 29, 2024



Enhancing the safety of autonomous vehicles is crucial, especially given recent accidents involving automated systems. As passengers in these vehicles, humans' sensory perception and decision-making can be integrated with autonomous systems to improve safety. This study explores neural mechanisms in passenger-vehicle interactions, leading to the development of a Passenger Cognitive Model (PCM) and the Passenger EEG Decoding Strategy (PEDS). Central to PEDS is a novel Convolutional Recurrent Neural Network (CRNN) that captures spatial and temporal EEG data patterns. The CRNN, combined with stacking algorithms, achieves an accuracy of $85.0\% \pm 3.18\%$. Our findings highlight the predictive power of pre-event EEG data, enhancing the detection of hazardous scenarios and offering a network-driven framework for safer autonomous vehicles.