 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen-H-Embodiment: A Large-Scale Dataset for Enabling Foundation Models in Medical Robotics
Apr 22, 2026Autonomous medical robots hold promise to improve patient outcomes, reduce provider workload, democratize access to care, and enable superhuman precision. However, autonomous medical robotics has been limited by a fundamental data problem: existing medical robotic datasets are small, single-embodiment, and rarely shared openly, restricting the development of foundation models that the field needs to advance. We introduce Open-H-Embodiment, the largest open dataset of medical robotic video with synchronized kinematics to date, spanning more than 49 institutions and multiple robotic platforms including the CMR Versius, Intuitive Surgical's da Vinci, da Vinci Research Kit (dVRK), Rob Surgical BiTrack, Virtual Incision's MIRA, Moon Surgical Maestro, and a variety of custom systems, spanning surgical manipulation, robotic ultrasound, and endoscopy procedures. We demonstrate the research enabled by this dataset through two foundation models. GR00T-H is the first open foundation vision-language-action model for medical robotics, which is the only evaluated model to achieve full end-to-end task completion on a structured suturing benchmark (25% of trials vs. 0% for all others) and achieves 64% average success across a 29-step ex vivo suturing sequence. We also train Cosmos-H-Surgical-Simulator, the first action-conditioned world model to enable multi-embodiment surgical simulation from a single checkpoint, spanning nine robotic platforms and supporting in silico policy evaluation and synthetic data generation for the medical domain. These results suggest that open, large-scale medical robot data collection can serve as critical infrastructure for the research community, enabling advances in robot learning, world modeling, and beyond.
STITCH 2.0: Extending Augmented Suturing with EKF Needle Estimation and Thread Management
Oct 29, 2025Surgical suturing is a high-precision task that impacts patient healing and scarring. Suturing skill varies widely between surgeons, highlighting the need for robot assistance. Previous robot suturing works, such as STITCH 1.0 [1], struggle to fully close wounds due to inaccurate needle tracking and poor thread management. To address these challenges, we present STITCH 2.0, an elevated augmented dexterity pipeline with seven improvements including: improved EKF needle pose estimation, new thread untangling methods, and an automated 3D suture alignment algorithm. Experimental results over 15 trials find that STITCH 2.0 on average achieves 74.4% wound closure with 4.87 sutures per trial, representing 66% more sutures in 38% less time compared to the previous baseline. When two human interventions are allowed, STITCH 2.0 averages six sutures with 100% wound closure rate. Project website: https://stitch-2.github.io/
Eye, Robot: Learning to Look to Act with a BC-RL Perception-Action Loop
Jun 12, 2025



Humans do not passively observe the visual world -- we actively look in order to act. Motivated by this principle, we introduce EyeRobot, a robotic system with gaze behavior that emerges from the need to complete real-world tasks. We develop a mechanical eyeball that can freely rotate to observe its surroundings and train a gaze policy to control it using reinforcement learning. We accomplish this by first collecting teleoperated demonstrations paired with a 360 camera. This data is imported into a simulation environment that supports rendering arbitrary eyeball viewpoints, allowing episode rollouts of eye gaze on top of robot demonstrations. We then introduce a BC-RL loop to train the hand and eye jointly: the hand (BC) agent is trained from rendered eye observations, and the eye (RL) agent is rewarded when the hand produces correct action predictions. In this way, hand-eye coordination emerges as the eye looks towards regions which allow the hand to complete the task. EyeRobot implements a foveal-inspired policy architecture allowing high resolution with a small compute budget, which we find also leads to the emergence of more stable fixation as well as improved ability to track objects and ignore distractors. We evaluate EyeRobot on five panoramic workspace manipulation tasks requiring manipulation in an arc surrounding the robot arm. Our experiments suggest EyeRobot exhibits hand-eye coordination behaviors which effectively facilitate manipulation over large workspaces with a single camera. See project site for videos: https://www.eyerobot.net/
Robo-DM: Data Management For Large Robot Datasets
May 21, 2025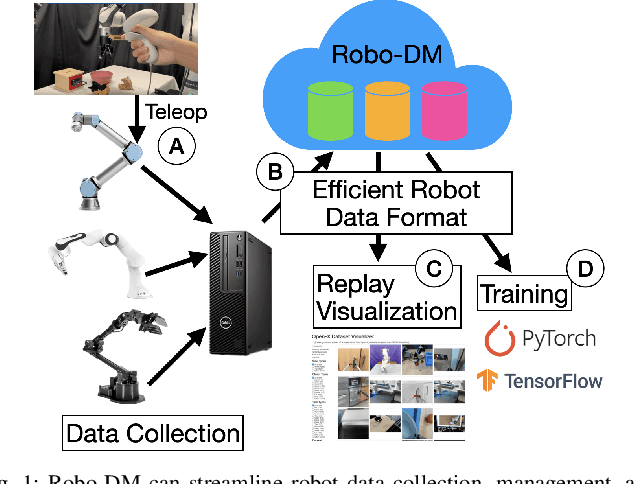
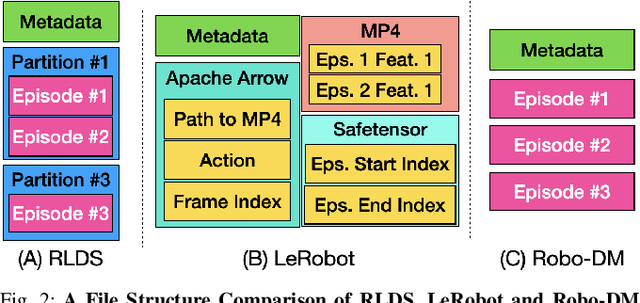
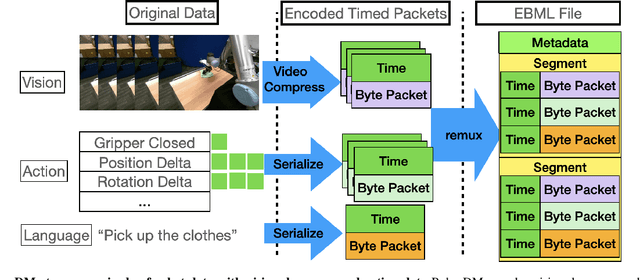
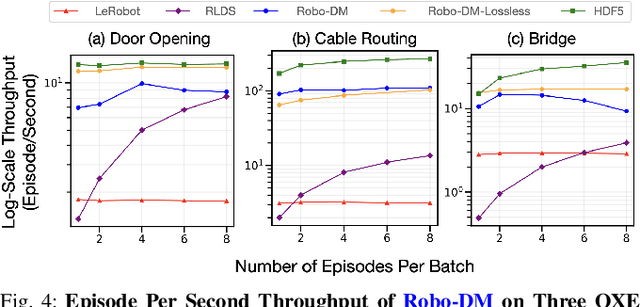
Recent results suggest that very large datasets of teleoperated robot demonstrations can be used to train transformer-based models that have the potential to generalize to new scenes, robots, and tasks. However, curating, distributing, and loading large datasets of robot trajectories, which typically consist of video, textual, and numerical modalities - including streams from multiple cameras - remains challenging. We propose Robo-DM, an efficient open-source cloud-based data management toolkit for collecting, sharing, and learning with robot data. With Robo-DM, robot datasets are stored in a self-contained format with Extensible Binary Meta Language (EBML). Robo-DM can significantly reduce the size of robot trajectory data, transfer costs, and data load time during training. Compared to the RLDS format used in OXE datasets, Robo-DM's compression saves space by up to 70x (lossy) and 3.5x (lossless). Robo-DM also accelerates data retrieval by load-balancing video decoding with memory-mapped decoding caches. Compared to LeRobot, a framework that also uses lossy video compression, Robo-DM is up to 50x faster when decoding sequentially. We physically evaluate a model trained by Robo-DM with lossy compression, a pick-and-place task, and In-Context Robot Transformer. Robo-DM uses 75x compression of the original dataset and does not suffer reduction in downstream task accuracy.
SuFIA-BC: Generating High Quality Demonstration Data for Visuomotor Policy Learning in Surgical Subtasks
Apr 21, 2025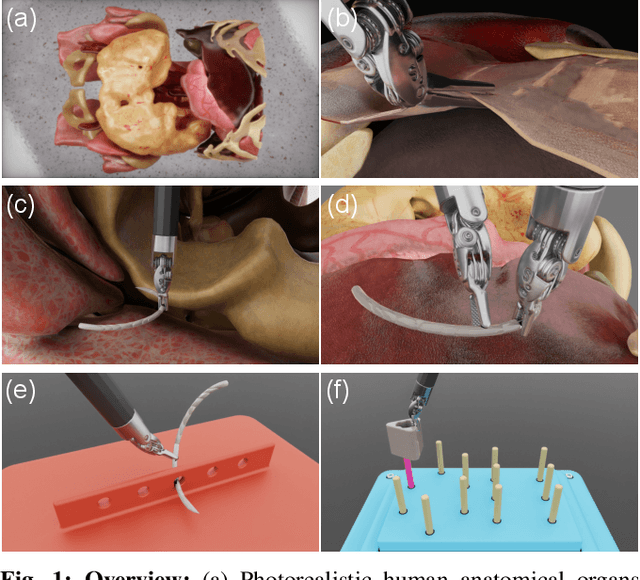
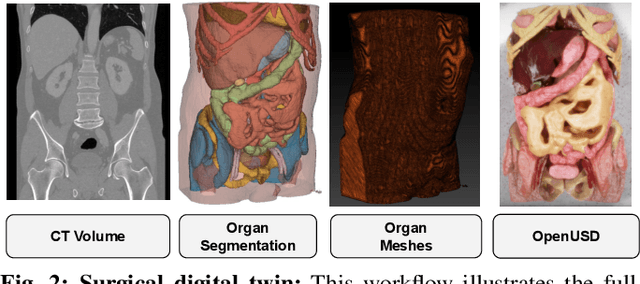
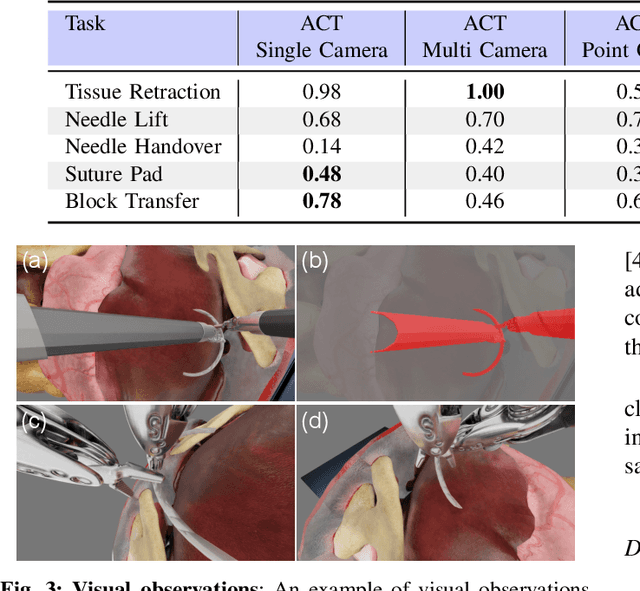

Behavior cloning facilitates the learning of dexterous manipulation skills, yet the complexity of surgical environments, the difficulty and expense of obtaining patient data, and robot calibration errors present unique challenges for surgical robot learning. We provide an enhanced surgical digital twin with photorealistic human anatomical organs, integrated into a comprehensive simulator designed to generate high-quality synthetic data to solve fundamental tasks in surgical autonomy. We present SuFIA-BC: visual Behavior Cloning policies for Surgical First Interactive Autonomy Assistants. We investigate visual observation spaces including multi-view cameras and 3D visual representations extracted from a single endoscopic camera view. Through systematic evaluation, we find that the diverse set of photorealistic surgical tasks introduced in this work enables a comprehensive evaluation of prospective behavior cloning models for the unique challenges posed by surgical environments. We observe that current state-of-the-art behavior cloning techniques struggle to solve the contact-rich and complex tasks evaluated in this work, regardless of their underlying perception or control architectures. These findings highlight the importance of customizing perception pipelines and control architectures, as well as curating larger-scale synthetic datasets that meet the specific demands of surgical tasks. Project website: https://orbit-surgical.github.io/sufia-bc/
Persistent Object Gaussian Splat (POGS) for Tracking Human and Robot Manipulation of Irregularly Shaped Objects
Mar 07, 2025



Tracking and manipulating irregularly-shaped, previously unseen objects in dynamic environments is important for robotic applications in manufacturing, assembly, and logistics. Recently introduced Gaussian Splats efficiently model object geometry, but lack persistent state estimation for task-oriented manipulation. We present Persistent Object Gaussian Splat (POGS), a system that embeds semantics, self-supervised visual features, and object grouping features into a compact representation that can be continuously updated to estimate the pose of scanned objects. POGS updates object states without requiring expensive rescanning or prior CAD models of objects. After an initial multi-view scene capture and training phase, POGS uses a single stereo camera to integrate depth estimates along with self-supervised vision encoder features for object pose estimation. POGS supports grasping, reorientation, and natural language-driven manipulation by refining object pose estimates, facilitating sequential object reset operations with human-induced object perturbations and tool servoing, where robots recover tool pose despite tool perturbations of up to 30{\deg}. POGS achieves up to 12 consecutive successful object resets and recovers from 80% of in-grasp tool perturbations.
FogROS2-FT: Fault Tolerant Cloud Robotics
Dec 06, 2024



Cloud robotics enables robots to offload complex computational tasks to cloud servers for performance and ease of management. However, cloud compute can be costly, cloud services can suffer occasional downtime, and connectivity between the robot and cloud can be prone to variations in network Quality-of-Service (QoS). We present FogROS2-FT (Fault Tolerant) to mitigate these issues by introducing a multi-cloud extension that automatically replicates independent stateless robotic services, routes requests to these replicas, and directs the first response back. With replication, robots can still benefit from cloud computations even when a cloud service provider is down or there is low QoS. Additionally, many cloud computing providers offer low-cost spot computing instances that may shutdown unpredictably. Normally, these low-cost instances would be inappropriate for cloud robotics, but the fault tolerance nature of FogROS2-FT allows them to be used reliably. We demonstrate FogROS2-FT fault tolerance capabilities in 3 cloud-robotics scenarios in simulation (visual object detection, semantic segmentation, motion planning) and 1 physical robot experiment (scan-pick-and-place). Running on the same hardware specification, FogROS2-FT achieves motion planning with up to 2.2x cost reduction and up to a 5.53x reduction on 99 Percentile (P99) long-tail latency. FogROS2-FT reduces the P99 long-tail latency of object detection and semantic segmentation by 2.0x and 2.1x, respectively, under network slowdown and resource contention.
Language-Embedded Gaussian Splats (LEGS): Incrementally Building Room-Scale Representations with a Mobile Robot
Sep 26, 2024



Building semantic 3D maps is valuable for searching for objects of interest in offices, warehouses, stores, and homes. We present a mapping system that incrementally builds a Language-Embedded Gaussian Splat (LEGS): a detailed 3D scene representation that encodes both appearance and semantics in a unified representation. LEGS is trained online as a robot traverses its environment to enable localization of open-vocabulary object queries. We evaluate LEGS on 4 room-scale scenes where we query for objects in the scene to assess how LEGS can capture semantic meaning. We compare LEGS to LERF and find that while both systems have comparable object query success rates, LEGS trains over 3.5x faster than LERF. Results suggest that a multi-camera setup and incremental bundle adjustment can boost visual reconstruction quality in constrained robot trajectories, and suggest LEGS can localize open-vocabulary and long-tail object queries with up to 66% accuracy.
ORBIT-Surgical: An Open-Simulation Framework for Learning Surgical Augmented Dexterity
Apr 24, 2024



Physics-based simulations have accelerated progress in robot learning for driving, manipulation, and locomotion. Yet, a fast, accurate, and robust surgical simulation environment remains a challenge. In this paper, we present ORBIT-Surgical, a physics-based surgical robot simulation framework with photorealistic rendering in NVIDIA Omniverse. We provide 14 benchmark surgical tasks for the da Vinci Research Kit (dVRK) and Smart Tissue Autonomous Robot (STAR) which represent common subtasks in surgical training. ORBIT-Surgical leverages GPU parallelization to train reinforcement learning and imitation learning algorithms to facilitate study of robot learning to augment human surgical skills. ORBIT-Surgical also facilitates realistic synthetic data generation for active perception tasks. We demonstrate ORBIT-Surgical sim-to-real transfer of learned policies onto a physical dVRK robot. Project website: orbit-surgical.github.io
STITCH: Augmented Dexterity for Suture Throws Including Thread Coordination and Handoffs
Apr 08, 2024



We present STITCH: an augmented dexterity pipeline that performs Suture Throws Including Thread Coordination and Handoffs. STITCH iteratively performs needle insertion, thread sweeping, needle extraction, suture cinching, needle handover, and needle pose correction with failure recovery policies. We introduce a novel visual 6D needle pose estimation framework using a stereo camera pair and new suturing motion primitives. We compare STITCH to baselines, including a proprioception-only and a policy without visual servoing. In physical experiments across 15 trials, STITCH achieves an average of 2.93 sutures without human intervention and 4.47 sutures with human intervention. See https://sites.google.com/berkeley.edu/stitch for code and supplemental materials.