 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComAct: Reframing Professional Software Manipulation via COM-as-Action Paradigm
Jun 11, 2026Existing computer-use agents remain fundamentally limited in professional software manipulation: GUI-based agents suffer from fragile visual grounding and long-horizon error accumulation, while API-basedapproaches struggle with heterogeneous protocols and inaccessible commercial interfaces. In this work,we identify the Component Object Model (COM) as a unified executable abstraction, proposing COM-as-Action: a new paradigm that reframes professional software interaction as deterministic program synthesisrather than sequential visual control. To validate this paradigm in the most demanding environments, weintroduce ComCADBench, the first benchmark for agents operating real industrial CAD software. Ourexperiments reveal a substantial paradigm gap: frontier proprietary models achieve near-zero successunder GUI-based interaction, whereas COM-based execution yields substantial immediate gains. Tobridge the remaining gap between syntactic correctness and geometric accuracy, we develop ComActor, aself-correcting agent trained through a progressive three-stage framework, alongside ComForge, a scalableplatform for large-scale training in Windows containers. Extensive experiments show that ComActorachieves state-of-the-art performance on ComCADBench, with strong resilience in long-horizon taskswhere baselines collapse, and generalizes to external CAD benchmark.
IterCAD: An Iterative Multimodal Agent for Visually-Grounded CAD Generation and Editing
Jun 11, 2026Computer-Aided Design is pivotal in modern manufacturing, yet existing automated methods predominantly rely on open-loop, one-shot generation, creating a mismatch with iterative real-world practices. In this paper, we present IterCAD, a unified multimodal agent framework for closed-loop, interactive CAD generation and editing. We formulate the task as a multi-turn interaction between a multimodal agent and an executable CAD sandbox, covering three tasks: Drawing-to-Code, Text-to-Code, and Interactive Editing. To support this, we develop a data synthesis pipeline incorporating advanced industrial manufacturing features to generate standard-compliant multi-view engineering drawings, complex code-editing tasks, and high-fidelity interaction trajectories. We optimize the agent via progressive SFT followed by geometry-aware reinforcement learning with viable-prefix masking to enhance code executability and geometric fidelity. Finally, we introduce the IterCAD-Bench evaluation suite and propose the Chamfer Distance Tolerance-Recall (CD-TR) curve alongside its AUC-TR metric, establishing a survivor-bias-free standard that unifies code validity and geometric precision. Extensive experiments demonstrate that IterCAD achieves highly competitive performance across multiple benchmarks, significantly outperforming existing approaches in both code executability and geometric precision, while exhibiting superior capabilities in closed-loop iterative refinement.
EviProp: Seeded Relevance Diffusion on Chunk-Page Graphs for Long Multimodal Document Retrieval
Jun 08, 2026Retrieving evidence pages from visually rich long documents is a key challenge in document question answering. Existing page-level visual retrievers operate under an independent matching paradigm: each page is scored in isolation based on query-page similarity. This paradigm can under-rank evidence pages whose signals are localized in fine-grained chunks or depend on document-internal associations. We propose EviProp, a retrieval method that recovers such pages via seeded relevance diffusion. EviProp models each document as a multimodal Chunk-Page graph with hierarchical, sequential, and similarity links. Given a query, it combines dense visual page priors with sparse chunk seeds, then runs Personalized PageRank to diffuse relevance over the graph. Experiments on MMLongBench-Doc and LongDocURL show consistent gains in evidence-page retrieval over independent visual retrieval and text-visual fusion baselines. Downstream QA results further show that improved retrieval translates into better answer accuracy, with negligible online retrieval overhead. Our code is released at https://github.com/Flyecnu/EviProp.
IA-RAG: Interval-Algebra-Driven Temporal Reasoning for Dynamic Knowledge Retrieval
Jun 04, 2026Retrieval-Augmented Generation (RAG) has shown strong effectiveness in grounding Large Language Models (LLMs) with external knowledge. However, existing RAG and Graph RAG frameworks largely treat knowledge as static or associate time with coarse-grained timestamps or metadata, failing to capture rich temporal structures such as duration, overlap, and containment. We propose IA-RAG, a hierarchical temporal RAG framework that models knowledge as time intervals and performs retrieval under formal temporal constraints. IA-RAG represents facts as Interval Event Units (IEUs) and organizes them into a hierarchical Thematic Forest, where temporal dependencies are governed by Allen's Interval Algebra. To handle incomplete or uncertain temporal boundaries, IA-RAG further introduces a Sub-graph Time Tightening mechanism that refines fuzzy intervals through logical constraints within connected event subgraphs. In addition, IA-RAG supports implicit temporal semantic retrieval through interval-algebra-guided traversal. Experiments on multiple temporal question answering benchmarks, including TimeQA, TempReason, and ComplexTR, demonstrate that IA-RAG achieves strong temporal retrieval and reasoning performance, particularly on complex compositional temporal reasoning tasks. Our code is released at https://github.com/xiaoAugenstern/LogicalRAG_TemporalQA.
SPIRAL: A Closed-Loop Framework for Self-Improving Action World Models via Reflective Planning Agents
Mar 11, 2026We introduce SPIRAL, a self-improving planning and iterative reflective action world modeling closed-loop framework that enables controllable long-horizon video generation conditioned on high-level semantic actions. Existing one-shot video generation models operate in open-loop, often resulting in incomplete action execution, weak semantic grounding, and temporal drift. SPIRAL formulates ActWM as a closed-loop think-act-reflect process, where generation proceeds step by step under explicit planning and feedback. A PlanAgent decomposes abstract actions into object-centric sub-actions, while a CriticAgent evaluates intermediate results and guides iterative refinement with long-horizon memory. This closed-loop design naturally supports RL evolving optimization, improving semantic alignment and temporal consistency over extended horizons. We further introduce the ActWM-Dataset and ActWM-Bench for training and evaluation. Experiments across multiple TI2V backbones demonstrate consistent gains on ActWM-Bench and mainstream video generation benchmarks, validating SPIRAL's effectiveness.
Training-Free Acceleration for Document Parsing Vision-Language Model with Hierarchical Speculative Decoding
Feb 13, 2026Document parsing is a fundamental task in multimodal understanding, supporting a wide range of downstream applications such as information extraction and intelligent document analysis. Benefiting from strong semantic modeling and robust generalization, VLM-based end-to-end approaches have emerged as the mainstream paradigm in recent years. However, these models often suffer from substantial inference latency, as they must auto-regressively generate long token sequences when processing long-form documents. In this work, motivated by the extremely long outputs and complex layout structures commonly found in document parsing, we propose a training-free and highly efficient acceleration method. Inspired by speculative decoding, we employ a lightweight document parsing pipeline as a draft model to predict batches of future tokens, while the more accurate VLM verifies these draft predictions in parallel. Moreover, we further exploit the layout-structured nature of documents by partitioning each page into independent regions, enabling parallel decoding of each region using the same draft-verify strategy. The final predictions are then assembled according to the natural reading order. Experimental results demonstrate the effectiveness of our approach: on the general-purpose OmniDocBench, our method provides a 2.42x lossless acceleration for the dots.ocr model, and achieves up to 4.89x acceleration on long-document parsing tasks. We will release our code to facilitate reproducibility and future research.
The Agent's First Day: Benchmarking Learning, Exploration, and Scheduling in the Workplace Scenarios
Jan 13, 2026The rapid evolution of Multi-modal Large Language Models (MLLMs) has advanced workflow automation; however, existing research mainly targets performance upper bounds in static environments, overlooking robustness for stochastic real-world deployment. We identify three key challenges: dynamic task scheduling, active exploration under uncertainty, and continuous learning from experience. To bridge this gap, we introduce \method{}, a dynamic evaluation environment that simulates a "trainee" agent continuously exploring a novel setting. Unlike traditional benchmarks, \method{} evaluates agents along three dimensions: (1) context-aware scheduling for streaming tasks with varying priorities; (2) prudent information acquisition to reduce hallucination via active exploration; and (3) continuous evolution by distilling generalized strategies from rule-based, dynamically generated tasks. Experiments show that cutting-edge agents have significant deficiencies in dynamic environments, especially in active exploration and continual learning. Our work establishes a framework for assessing agent reliability, shifting evaluation from static tests to realistic, production-oriented scenarios. Our codes are available at https://github.com/KnowledgeXLab/EvoEnv
SymDrive: Realistic and Controllable Driving Simulator via Symmetric Auto-regressive Online Restoration
Dec 25, 2025



High-fidelity and controllable 3D simulation is essential for addressing the long-tail data scarcity in Autonomous Driving (AD), yet existing methods struggle to simultaneously achieve photorealistic rendering and interactive traffic editing. Current approaches often falter in large-angle novel view synthesis and suffer from geometric or lighting artifacts during asset manipulation. To address these challenges, we propose SymDrive, a unified diffusion-based framework capable of joint high-quality rendering and scene editing. We introduce a Symmetric Auto-regressive Online Restoration paradigm, which constructs paired symmetric views to recover fine-grained details via a ground-truth-guided dual-view formulation and utilizes an auto-regressive strategy for consistent lateral view generation. Furthermore, we leverage this restoration capability to enable a training-free harmonization mechanism, treating vehicle insertion as context-aware inpainting to ensure seamless lighting and shadow consistency. Extensive experiments demonstrate that SymDrive achieves state-of-the-art performance in both novel-view enhancement and realistic 3D vehicle insertion.
Learning on the Job: An Experience-Driven Self-Evolving Agent for Long-Horizon Tasks
Oct 09, 2025Large Language Models have demonstrated remarkable capabilities across diverse domains, yet significant challenges persist when deploying them as AI agents for real-world long-horizon tasks. Existing LLM agents suffer from a critical limitation: they are test-time static and cannot learn from experience, lacking the ability to accumulate knowledge and continuously improve on the job. To address this challenge, we propose MUSE, a novel agent framework that introduces an experience-driven, self-evolving system centered around a hierarchical Memory Module. MUSE organizes diverse levels of experience and leverages them to plan and execute long-horizon tasks across multiple applications. After each sub-task execution, the agent autonomously reflects on its trajectory, converting the raw trajectory into structured experience and integrating it back into the Memory Module. This mechanism enables the agent to evolve beyond its static pretrained parameters, fostering continuous learning and self-evolution. We evaluate MUSE on the long-horizon productivity benchmark TAC. It achieves new SOTA performance by a significant margin using only a lightweight Gemini-2.5 Flash model. Sufficient Experiments demonstrate that as the agent autonomously accumulates experience, it exhibits increasingly superior task completion capabilities, as well as robust continuous learning and self-evolution capabilities. Moreover, the accumulated experience from MUSE exhibits strong generalization properties, enabling zero-shot improvement on new tasks. MUSE establishes a new paradigm for AI agents capable of real-world productivity task automation.
InternVL3.5: Advancing Open-Source Multimodal Models in Versatility, Reasoning, and Efficiency
Aug 25, 2025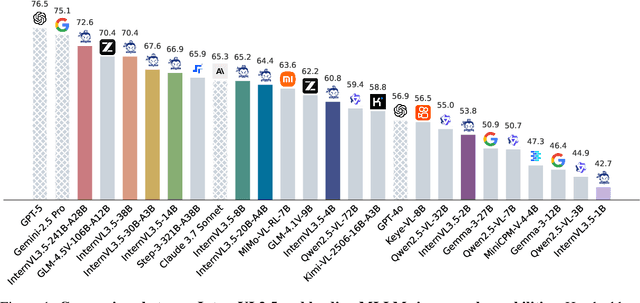
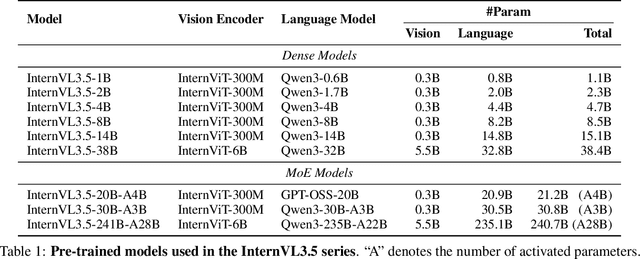
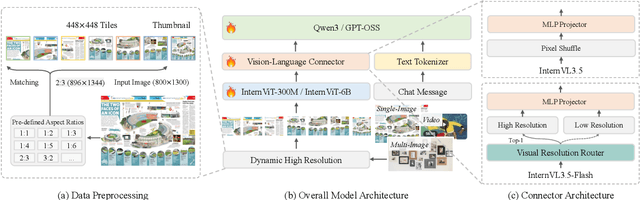
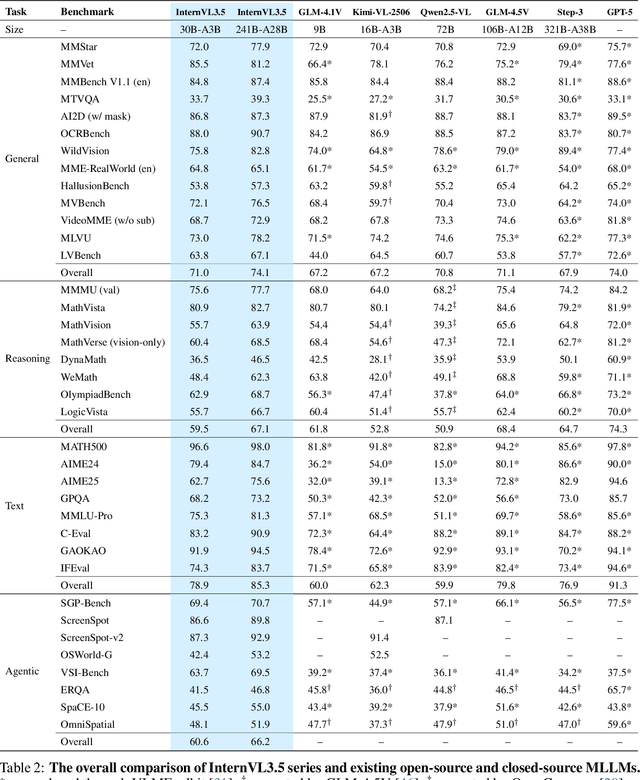
We introduce InternVL 3.5, a new family of open-source multimodal models that significantly advances versatility, reasoning capability, and inference efficiency along the InternVL series. A key innovation is the Cascade Reinforcement Learning (Cascade RL) framework, which enhances reasoning through a two-stage process: offline RL for stable convergence and online RL for refined alignment. This coarse-to-fine training strategy leads to substantial improvements on downstream reasoning tasks, e.g., MMMU and MathVista. To optimize efficiency, we propose a Visual Resolution Router (ViR) that dynamically adjusts the resolution of visual tokens without compromising performance. Coupled with ViR, our Decoupled Vision-Language Deployment (DvD) strategy separates the vision encoder and language model across different GPUs, effectively balancing computational load. These contributions collectively enable InternVL3.5 to achieve up to a +16.0\% gain in overall reasoning performance and a 4.05$\times$ inference speedup compared to its predecessor, i.e., InternVL3. In addition, InternVL3.5 supports novel capabilities such as GUI interaction and embodied agency. Notably, our largest model, i.e., InternVL3.5-241B-A28B, attains state-of-the-art results among open-source MLLMs across general multimodal, reasoning, text, and agentic tasks -- narrowing the performance gap with leading commercial models like GPT-5. All models and code are publicly released.