 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards a Reduced Dependency Framework for Autonomous Unified Inspect-Explore Missions
Sep 01, 2023



The task of establishing and maintaining situational awareness in an unknown environment is a critical step to fulfil in a mission related to the field of rescue robotics. Predominantly, the problem of visual inspection of urban structures is dealt with view-planning being addressed by map-based approaches. In this article, we propose a novel approach towards effective use of Micro Aerial Vehicles (MAVs) for obtaining a 3-D shape of an unknown structure of objects utilizing a map-independent planning framework. The problem is undertaken via a bifurcated approach to address the task of executing a closer inspection of detected structures with a wider exploration strategy to identify and locate nearby structures, while being equipped with limited sensing capability. The proposed framework is evaluated experimentally in a controlled indoor environment in presence of a mock-up environment validating the efficacy of the proposed inspect-explore policy.
Contact-Prioritized Planning of Impact-Resilient Aerial Robots with an Integrated Compliant Arm
May 24, 2023



The article develops an impact-resilient aerial robot (s-ARQ) equipped with a compliant arm to sense contacts and reduce collision impact and featuring a real-time contact force estimator and a non-linear motion controller to handle collisions while performing aggressive maneuvers and stabilize from high-speed wall collisions. Further, a new collision-inclusive planning method that aims to prioritize contacts to facilitate aerial robot navigation in cluttered environments is proposed. A range of simulated and physical experiments demonstrate key benefits of the robot and the contact-prioritized (CP) planner. Experimental results show that the compliant robot has only a $4\%$ weight increase but around $40\%$ impact reduction in drop tests and wall collision tests. s-ARQ can handle collisions while performing aggressive maneuvers and stabilize from high-speed wall collisions at $3.0$ m/s with a success rate of $100\%$. Our proposed compliant robot and contact-prioritized planning method can accelerate computation time while having shorter trajectory time and larger clearances compared to A$^\ast$ and RRT$^\ast$ planners with velocity constraints. Online planning tests in partially-known environments further demonstrate the preliminary feasibility of our method to apply in practical use cases.
A Multi-step Dynamics Modeling Framework For Autonomous Driving In Multiple Environments
May 03, 2023Modeling dynamics is often the first step to making a vehicle autonomous. While on-road autonomous vehicles have been extensively studied, off-road vehicles pose many challenging modeling problems. An off-road vehicle encounters highly complex and difficult-to-model terrain/vehicle interactions, as well as having complex vehicle dynamics of its own. These complexities can create challenges for effective high-speed control and planning. In this paper, we introduce a framework for multistep dynamics prediction that explicitly handles the accumulation of modeling error and remains scalable for sampling-based controllers. Our method uses a specially-initialized Long Short-Term Memory (LSTM) over a limited time horizon as the learned component in a hybrid model to predict the dynamics of a 4-person seating all-terrain vehicle (Polaris S4 1000 RZR) in two distinct environments. By only having the LSTM predict over a fixed time horizon, we negate the need for long term stability that is often a challenge when training recurrent neural networks. Our framework is flexible as it only requires odometry information for labels. Through extensive experimentation, we show that our method is able to predict millions of possible trajectories in real-time, with a time horizon of five seconds in challenging off road driving scenarios.
Safe and Efficient Navigation in Extreme Environments using Semantic Belief Graphs
Apr 02, 2023



To achieve autonomy in unknown and unstructured environments, we propose a method for semantic-based planning under perceptual uncertainty. This capability is crucial for safe and efficient robot navigation in environment with mobility-stressing elements that require terrain-specific locomotion policies. We propose the Semantic Belief Graph (SBG), a geometric- and semantic-based representation of a robot's probabilistic roadmap in the environment. The SBG nodes comprise of the robot geometric state and the semantic-knowledge of the terrains in the environment. The SBG edges represent local semantic-based controllers that drive the robot between the nodes or invoke an information gathering action to reduce semantic belief uncertainty. We formulate a semantic-based planning problem on SBG that produces a policy for the robot to safely navigate to the target location with minimal traversal time. We analyze our method in simulation and present real-world results with a legged robotic platform navigating multi-level outdoor environments.
Adaptive Coverage Path Planning for Efficient Exploration of Unknown Environments
Feb 06, 2023



We present a method for solving the coverage problem with the objective of autonomously exploring an unknown environment under mission time constraints. Here, the robot is tasked with planning a path over a horizon such that the accumulated area swept out by its sensor footprint is maximized. Because this problem exhibits a diminishing returns property known as submodularity, we choose to formulate it as a tree-based sequential decision making process. This formulation allows us to evaluate the effects of the robot's actions on future world coverage states, while simultaneously accounting for traversability risk and the dynamic constraints of the robot. To quickly find near-optimal solutions, we propose an effective approximation to the coverage sensor model which adapts to the local environment. Our method was extensively tested across various complex environments and served as the local exploration algorithm for a competing entry in the DARPA Subterranean Challenge.
FRAME: Fast and Robust Autonomous 3D point cloud Map-merging for Egocentric multi-robot exploration
Jan 24, 2023



This article presents a 3D point cloud map-merging framework for egocentric heterogeneous multi-robot exploration, based on overlap detection and alignment, that is independent of a manual initial guess or prior knowledge of the robots' poses. The novel proposed solution utilizes state-of-the-art place recognition learned descriptors, that through the framework's main pipeline, offer a fast and robust region overlap estimation, hence eliminating the need for the time-consuming global feature extraction and feature matching process that is typically used in 3D map integration. The region overlap estimation provides a homogeneous rigid transform that is applied as an initial condition in the point cloud registration algorithm Fast-GICP, which provides the final and refined alignment. The efficacy of the proposed framework is experimentally evaluated based on multiple field multi-robot exploration missions in underground environments, where both ground and aerial robots are deployed, with different sensor configurations.
Fast and Scalable Signal Inference for Active Robotic Source Seeking
Jan 06, 2023



In active source seeking, a robot takes repeated measurements in order to locate a signal source in a cluttered and unknown environment. A key component of an active source seeking robot planner is a model that can produce estimates of the signal at unknown locations with uncertainty quantification. This model allows the robot to plan for future measurements in the environment. Traditionally, this model has been in the form of a Gaussian process, which has difficulty scaling and cannot represent obstacles. %In this work, We propose a global and local factor graph model for active source seeking, which allows the model to scale to a large number of measurements and represent unknown obstacles in the environment. We combine this model with extensions to a highly scalable planner to form a system for large-scale active source seeking. We demonstrate that our approach outperforms baseline methods in both simulated and real robot experiments.
Taxonomy of A Decision Support System for Adaptive Experimental Design in Field Robotics
Oct 15, 2022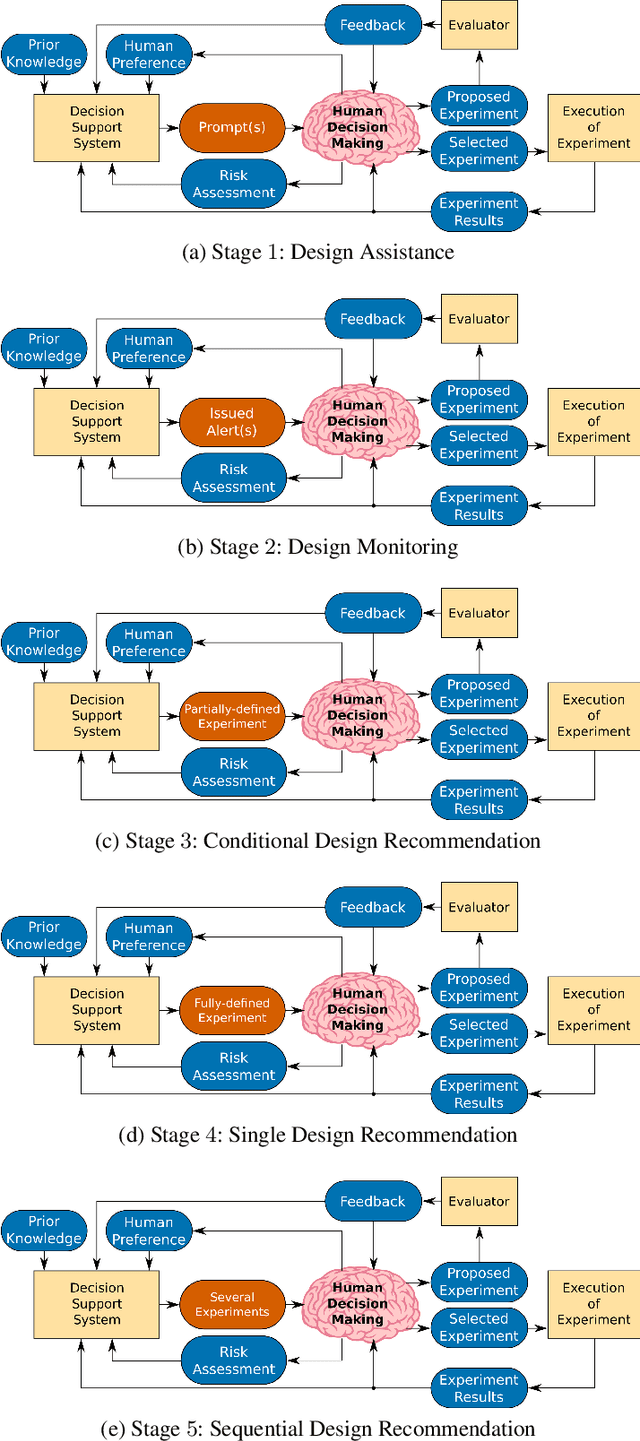
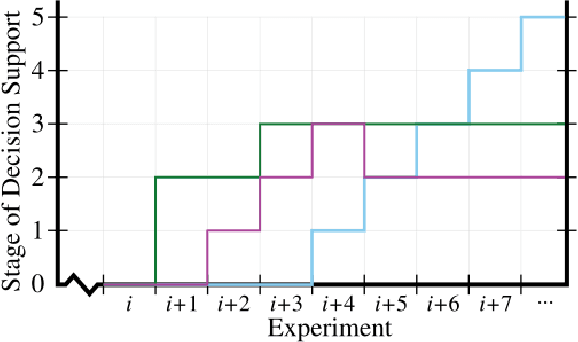
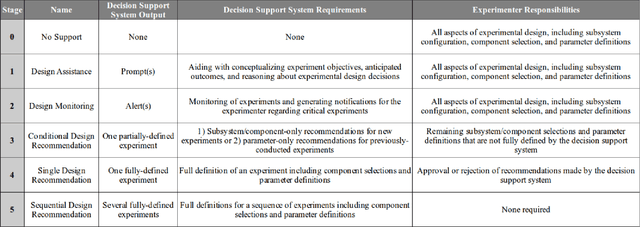
Experimental design in field robotics is an adaptive human-in-the-loop decision-making process in which an experimenter learns about system performance and limitations through interactions with a robot in the form of constructed experiments. This can be challenging because of system complexity, the need to operate in unstructured environments, and the competing objectives of maximizing information gain while simultaneously minimizing experimental costs. Based on the successes in other domains, we propose the use of a Decision Support System (DSS) to amplify the human's decision-making abilities, overcome their inherent shortcomings, and enable principled decision-making in field experiments. In this work, we propose common terminology and a six-stage taxonomy of DSSs specifically for adaptive experimental design of more informative tests and reduced experimental costs. We construct and present our taxonomy using examples and trends from DSS literature, including works involving artificial intelligence and Intelligent DSSs. Finally, we identify critical technical gaps and opportunities for future research to direct the scientific community in the pursuit of next-generation DSSs for experimental design.
Risk-aware Meta-level Decision Making for Exploration Under Uncertainty
Sep 12, 2022

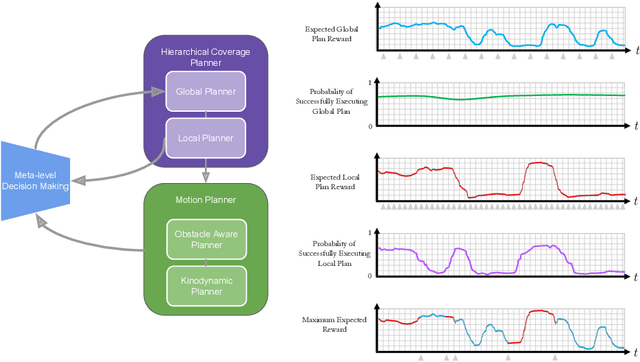
Robotic exploration of unknown environments is fundamentally a problem of decision making under uncertainty where the robot must account for uncertainty in sensor measurements, localization, action execution, as well as many other factors. For large-scale exploration applications, autonomous systems must overcome the challenges of sequentially deciding which areas of the environment are valuable to explore while safely evaluating the risks associated with obstacles and hazardous terrain. In this work, we propose a risk-aware meta-level decision making framework to balance the tradeoffs associated with local and global exploration. Meta-level decision making builds upon classical hierarchical coverage planners by switching between local and global policies with the overall objective of selecting the policy that is most likely to maximize reward in a stochastic environment. We use information about the environment history, traversability risk, and kinodynamic constraints to reason about the probability of successful policy execution to switch between local and global policies. We have validated our solution in both simulation and on a variety of large-scale real world hardware tests. Our results show that by balancing local and global exploration we are able to significantly explore large-scale environments more efficiently.
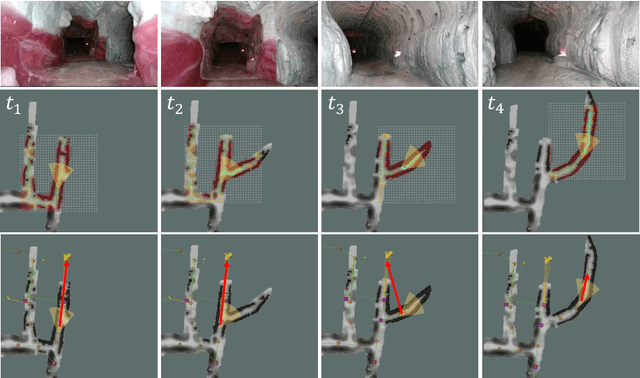
Present and Future of SLAM in Extreme Underground Environments
Aug 02, 2022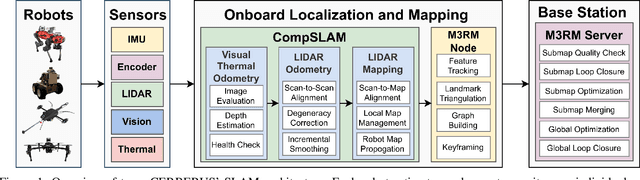
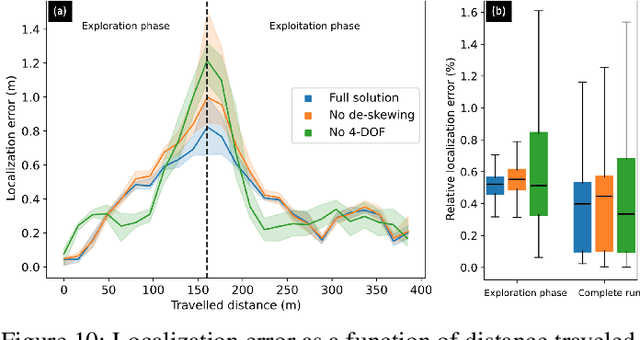
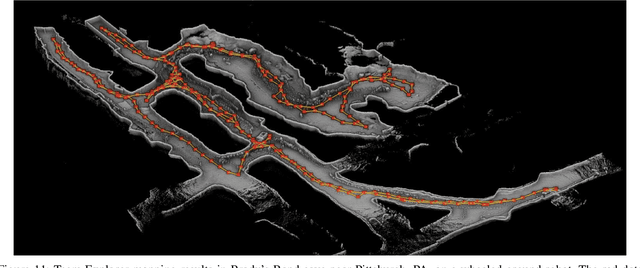
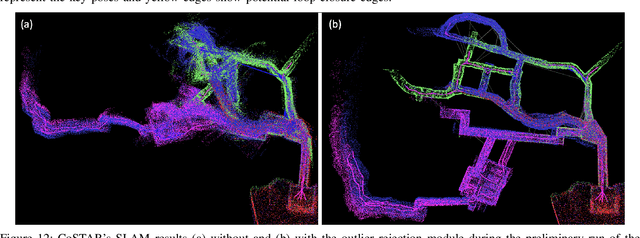
This paper reports on the state of the art in underground SLAM by discussing different SLAM strategies and results across six teams that participated in the three-year-long SubT competition. In particular, the paper has four main goals. First, we review the algorithms, architectures, and systems adopted by the teams; particular emphasis is put on lidar-centric SLAM solutions (the go-to approach for virtually all teams in the competition), heterogeneous multi-robot operation (including both aerial and ground robots), and real-world underground operation (from the presence of obscurants to the need to handle tight computational constraints). We do not shy away from discussing the dirty details behind the different SubT SLAM systems, which are often omitted from technical papers. Second, we discuss the maturity of the field by highlighting what is possible with the current SLAM systems and what we believe is within reach with some good systems engineering. Third, we outline what we believe are fundamental open problems, that are likely to require further research to break through. Finally, we provide a list of open-source SLAM implementations and datasets that have been produced during the SubT challenge and related efforts, and constitute a useful resource for researchers and practitioners.