 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePreference-Conditioned Reinforcement Learning for Space-Time Efficient Online 3D Bin Packing
Mar 08, 2026Robotic bin packing is widely deployed in warehouse automation, with current systems achieving robust performance through heuristic and learning-based strategies. These systems must balance compact placement with rapid execution, where selecting alternative items or reorienting them can improve space utilization but introduce additional time. We propose a selection-based formulation that explicitly reasons over this trade-off: at each step, the robot evaluates multiple candidate actions, weighing expected packing benefit against estimated operational time. This enables time-aware strategies that selectively accept increased operational time when it yields meaningful spatial improvements. Our method, STEP (Space-Time Efficient Packing), uses a preference-conditioned, Transformer-based reinforcement learning policy, and allows generalization across candidate set sizes and integration with standard placement modules. It achieves a 44% reduction in operational time without compromising packing density. Additional material is available at https://step-packing.github.io.
Learning the Contact Manifold for Accurate Pose Estimation During Peg-in-Hole Insertion of Complex Geometries
May 25, 2025Contact-rich assembly of complex, non-convex parts with tight tolerances remains a formidable challenge. Purely model-based methods struggle with discontinuous contact dynamics, while model-free methods require vast data and often lack precision. In this work, we introduce a hybrid framework that uses only contact-state information between a complex peg and its mating hole to recover the full SE(3) pose during assembly. In under 10 seconds of online execution, a sequence of primitive probing motions constructs a local contact submanifold, which is then aligned to a precomputed offline contact manifold to yield sub-mm and sub-degree pose estimates. To eliminate costly k-NN searches, we train a lightweight network that projects sparse contact observations onto the contact manifold and is 95x faster and 18% more accurate. Our method, evaluated on three industrially relevant geometries with clearances of 0.1-1.0 mm, achieves a success rate of 93.3%, a 4.1x improvement compared to primitive-only strategies without state estimation.
Robotic Compliant Object Prying Using Diffusion Policy Guided by Vision and Force Observations
Mar 06, 2025



The growing adoption of batteries in the electric vehicle industry and various consumer products has created an urgent need for effective recycling solutions. These products often contain a mix of compliant and rigid components, making robotic disassembly a critical step toward achieving scalable recycling processes. Diffusion policy has emerged as a promising approach for learning low-level skills in robotics. To effectively apply diffusion policy to contact-rich tasks, incorporating force as feedback is essential. In this paper, we apply diffusion policy with vision and force in a compliant object prying task. However, when combining low-dimensional contact force with high-dimensional image, the force information may be diluted. To address this issue, we propose a method that effectively integrates force with image data for diffusion policy observations. We validate our approach on a battery prying task that demands high precision and multi-step execution. Our model achieves a 96\% success rate in diverse scenarios, marking a 57\% improvement over the vision-only baseline. Our method also demonstrates zero-shot transfer capability to handle unseen objects and battery types. Supplementary videos and implementation codes are available on our project website. https://rros-lab.github.io/diffusion-with-force.github.io/
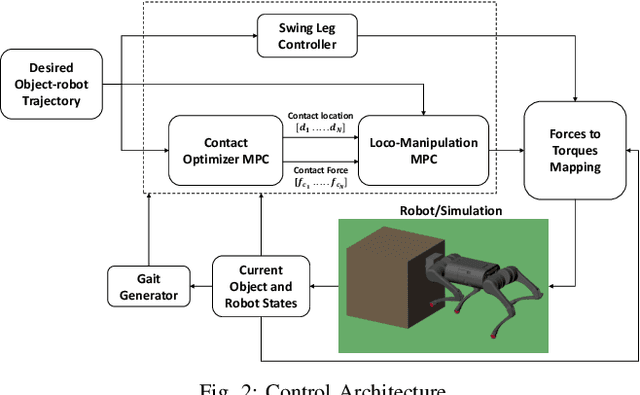
Hierarchical Optimization-based Control for Whole-body Loco-manipulation of Heavy Objects
Oct 31, 2023In recent years, the field of legged robotics has seen growing interest in enhancing the capabilities of these robots through the integration of articulated robotic arms. However, achieving successful loco-manipulation, especially involving interaction with heavy objects, is far from straightforward, as object manipulation can introduce substantial disturbances that impact the robot's locomotion. This paper presents a novel framework for legged loco-manipulation that considers whole-body coordination through a hierarchical optimization-based control framework. First, an online manipulation planner computes the manipulation forces and manipulated object task-based reference trajectory. Then, pose optimization aligns the robot's trajectory with kinematic constraints. The resultant robot reference trajectory is executed via a linear MPC controller incorporating the desired manipulation forces into its prediction model. Our approach has been validated in simulation and hardware experiments, highlighting the necessity of whole-body optimization compared to the baseline locomotion MPC when interacting with heavy objects. Experimental results with Unitree Aliengo, equipped with a custom-made robotic arm, showcase its ability to successfully lift and carry an 8kg payload and manipulate doors.
Taxonomy of A Decision Support System for Adaptive Experimental Design in Field Robotics
Oct 15, 2022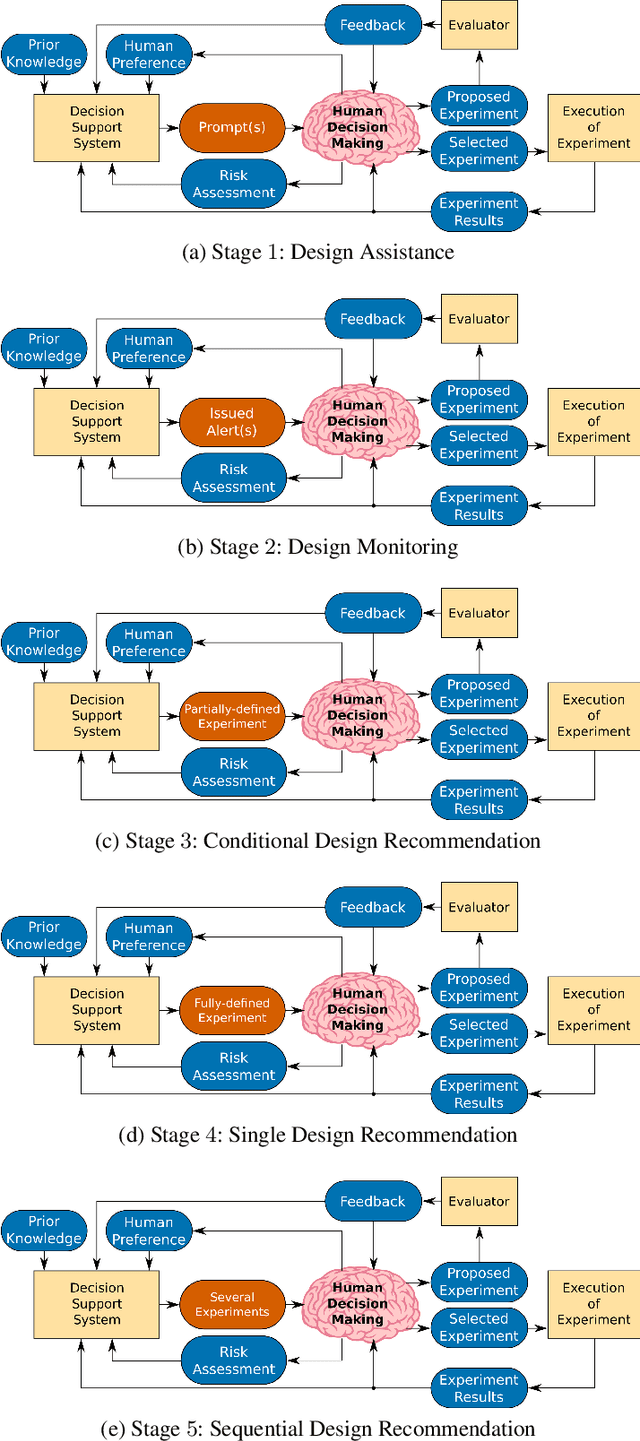
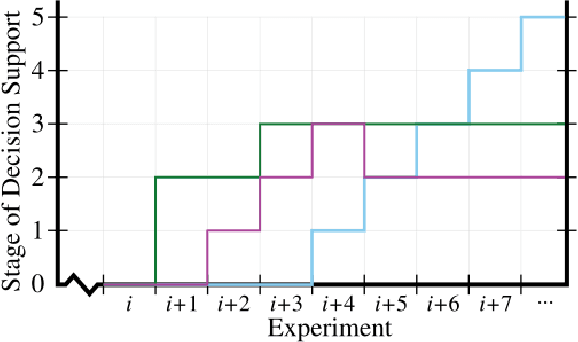
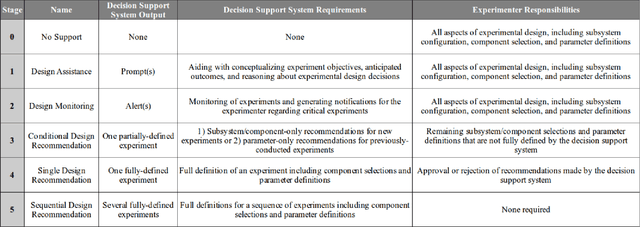
Experimental design in field robotics is an adaptive human-in-the-loop decision-making process in which an experimenter learns about system performance and limitations through interactions with a robot in the form of constructed experiments. This can be challenging because of system complexity, the need to operate in unstructured environments, and the competing objectives of maximizing information gain while simultaneously minimizing experimental costs. Based on the successes in other domains, we propose the use of a Decision Support System (DSS) to amplify the human's decision-making abilities, overcome their inherent shortcomings, and enable principled decision-making in field experiments. In this work, we propose common terminology and a six-stage taxonomy of DSSs specifically for adaptive experimental design of more informative tests and reduced experimental costs. We construct and present our taxonomy using examples and trends from DSS literature, including works involving artificial intelligence and Intelligent DSSs. Finally, we identify critical technical gaps and opportunities for future research to direct the scientific community in the pursuit of next-generation DSSs for experimental design.
Contact Optimization for Non-Prehensile Loco-Manipulation via Hierarchical Model Predictive Control
Oct 07, 2022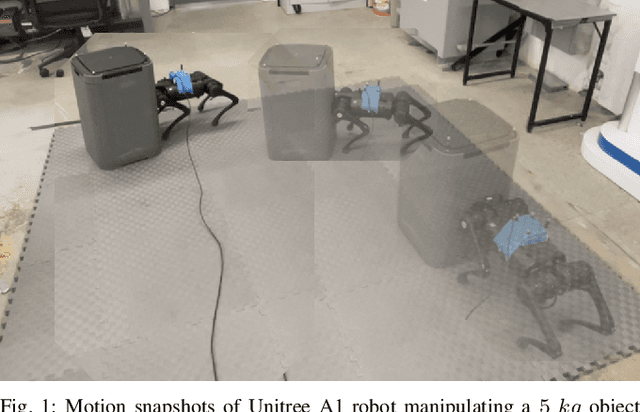
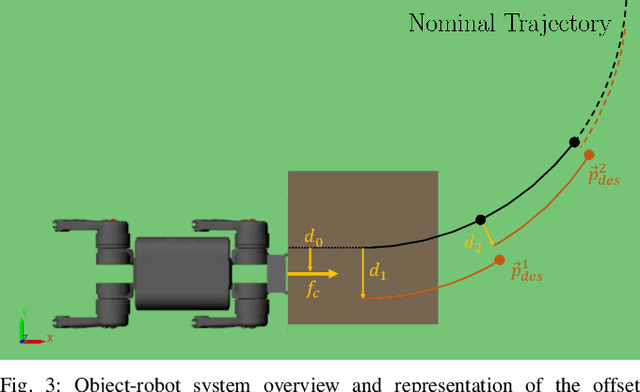
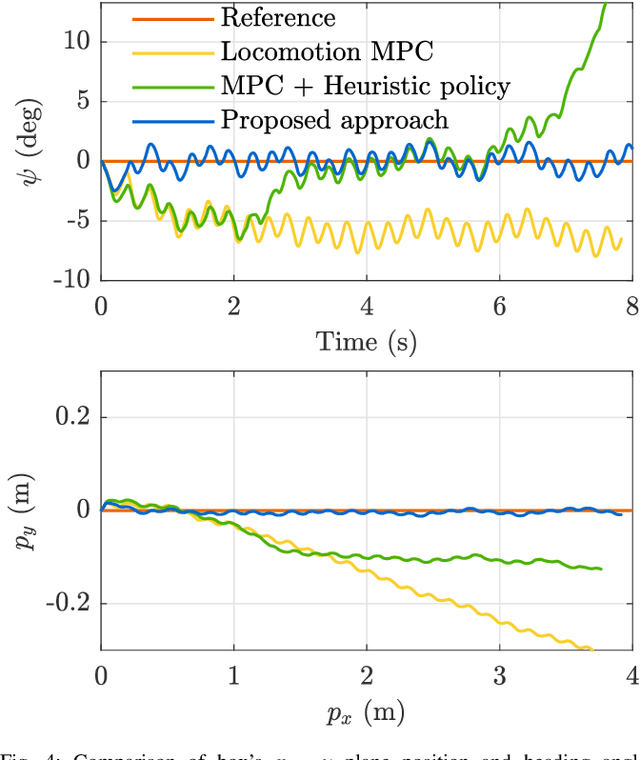
Recent studies on quadruped robots have focused on either locomotion or mobile manipulation using a robotic arm. Legged robots can manipulate heavier and larger objects using non-prehensile manipulation primitives, such as planar pushing, to drive the object to the desired location. In this paper, we present a novel hierarchical model predictive control (MPC) for contact optimization of the manipulation task. Using two cascading MPCs, we split the loco-manipulation problem into two parts: the first to optimize both contact force and contact location between the robot and the object, and the second to regulate the desired interaction force through the robot locomotion. Our method is successfully validated in both simulation and hardware experiments. While the baseline locomotion MPC fails to follow the desired trajectory of the object, our proposed approach can effectively control both object's position and orientation with minimal tracking error. This capability also allows us to perform obstacle avoidance for both the robot and the object during the loco-manipulation task.
Towards Transferring Human Preferences from Canonical to Actual Assembly Tasks
Nov 11, 2021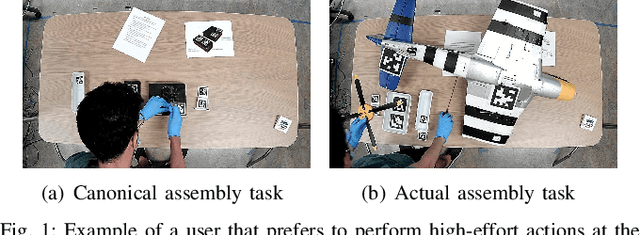
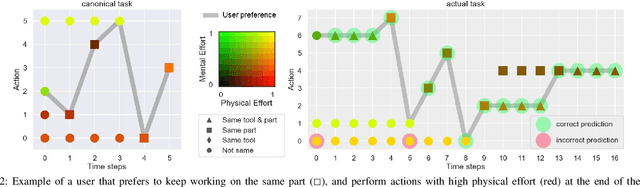
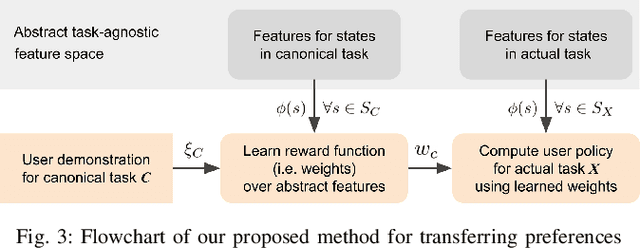
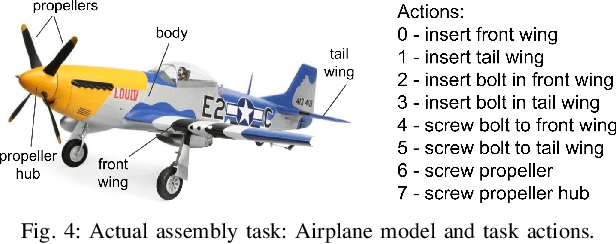
To assist human users according to their individual preference in assembly tasks, robots typically require user demonstrations in the given task. However, providing demonstrations in actual assembly tasks can be tedious and time-consuming. Our thesis is that we can learn user preferences in assembly tasks from demonstrations in a representative canonical task. Inspired by previous work in economy of human movement, we propose to represent user preferences as a linear function of abstract task-agnostic features, such as movement and physical and mental effort required by the user. For each user, we learn their preference from demonstrations in a canonical task and use the learned preference to anticipate their actions in the actual assembly task without any user demonstrations in the actual task. We evaluate our proposed method in a model-airplane assembly study and show that preferences can be effectively transferred from canonical to actual assembly tasks, enabling robots to anticipate user actions.
Two-Stage Clustering of Human Preferences for Action Prediction in Assembly Tasks
Mar 27, 2021
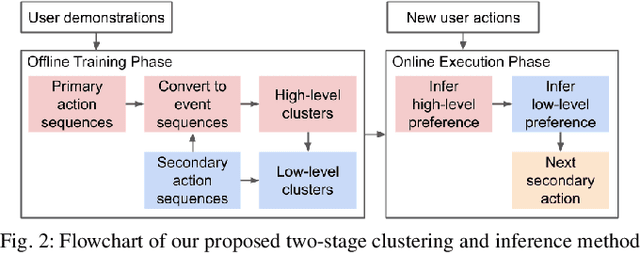
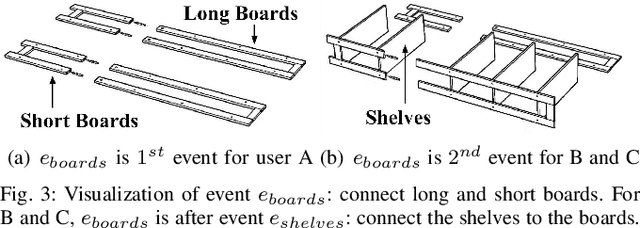
To effectively assist human workers in assembly tasks a robot must proactively offer support by inferring their preferences in sequencing the task actions. Previous work has focused on learning the dominant preferences of human workers for simple tasks largely based on their intended goal. However, people may have preferences at different resolutions: they may share the same high-level preference for the order of the sub-tasks but differ in the sequence of individual actions. We propose a two-stage approach for learning and inferring the preferences of human operators based on the sequence of sub-tasks and actions. We conduct an IKEA assembly study and demonstrate how our approach is able to learn the dominant preferences in a complex task. We show that our approach improves the prediction of human actions through cross-validation. Lastly, we show that our two-stage approach improves the efficiency of task execution in an online experiment, and demonstrate its applicability in a real-world robot-assisted IKEA assembly.
Human-Supervised Semi-Autonomous Mobile Manipulators for Safely and Efficiently Executing Machine Tending Tasks
Oct 16, 2020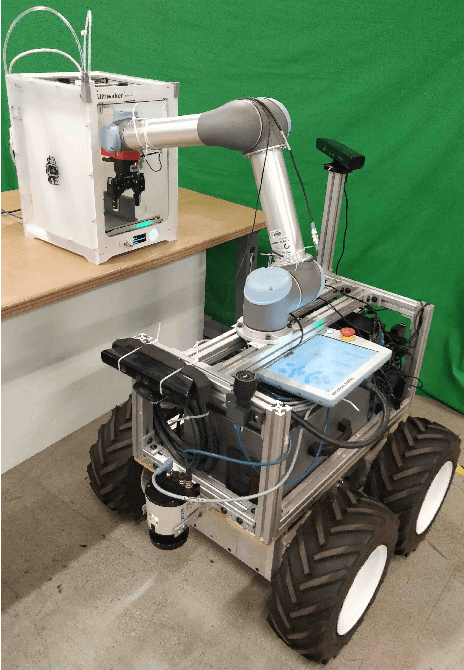
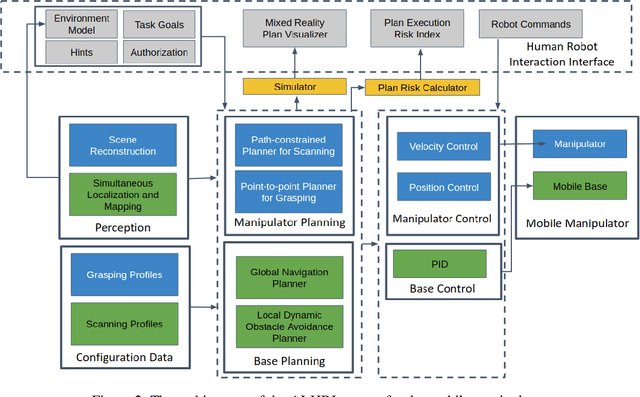
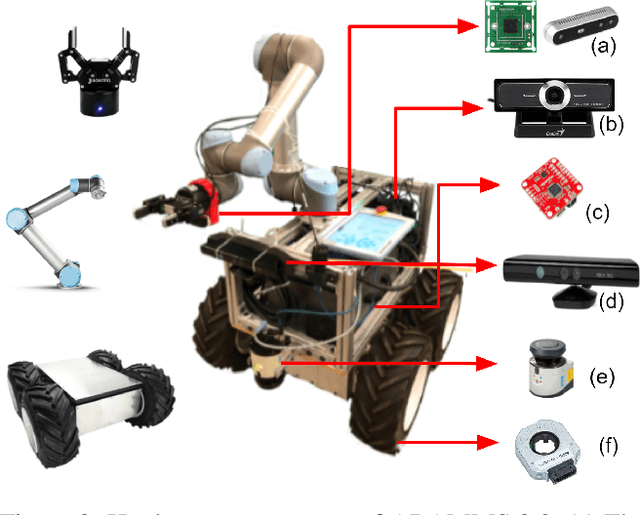
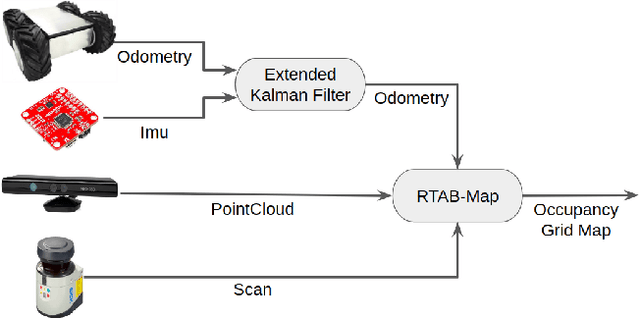
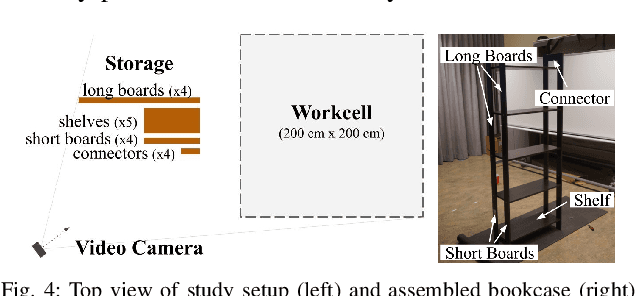
Mobile manipulators can be used for machine tending and material handling tasks in small volume manufacturing applications. These applications usually have semi-structured work environment. The use of a fully autonomous mobile manipulator for such applications can be risky, as an inaccurate model of the workspace may result in damage to expensive equipment. On the other hand, the use of a fully teleoperated mobile manipulator may require a significant amount of operator time. In this paper, a semi-autonomous mobile manipulator is developed for safely and efficiently carrying out machine tending tasks under human supervision. The robot is capable of generating motion plans from the high-level task description and presenting simulation results to the human for approval. The human operator can authorize the robot to execute the automatically generated plan or provide additional input to the planner to refine the plan. If the level of uncertainty in some parts of the workspace model is high, then the human can decide to perform teleoperation to safely execute the task. Our preliminary user trials show that non-expert operators can quickly learn to use the system and perform machine tending tasks.
An Alert-Generation Framework for Improving Resiliency in Human-Supervised, Multi-Agent Teams
Sep 13, 2019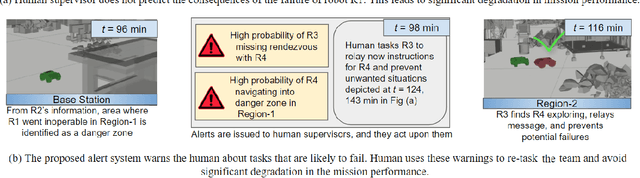
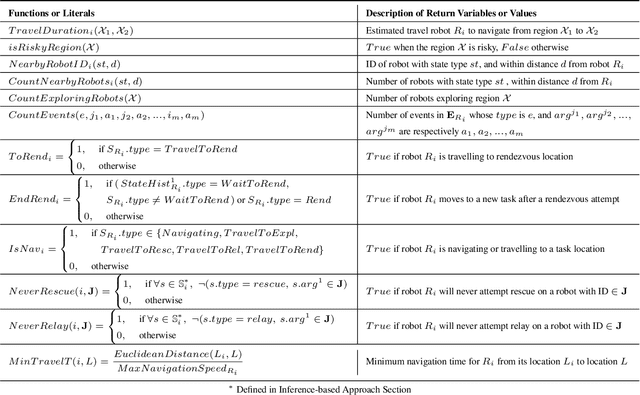
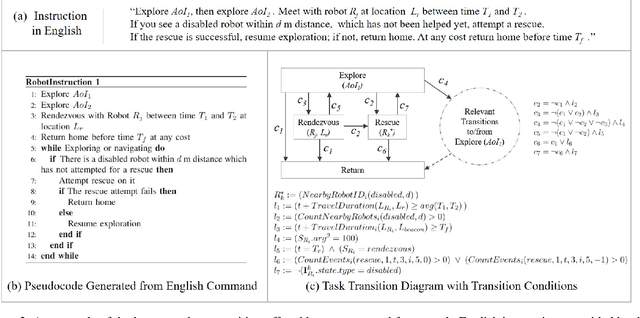
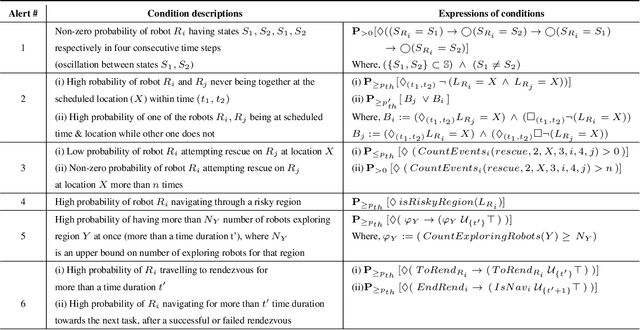
Human-supervision in multi-agent teams is a critical requirement to ensure that the decision-maker's risk preferences are utilized to assign tasks to robots. In stressful complex missions that pose risk to human health and life, such as humanitarian-assistance and disaster-relief missions, human mistakes or delays in tasking robots can adversely affect the mission. To assist human decision making in such missions, we present an alert-generation framework capable of detecting various modes of potential failure or performance degradation. We demonstrate that our framework, based on state machine simulation and formal methods, offers probabilistic modeling to estimate the likelihood of unfavorable events. We introduce smart simulation that offers a computationally-efficient way of detecting low-probability situations compared to standard Monte-Carlo simulations. Moreover, for certain class of problems, our inference-based method can provide guarantees on correctly detecting task failures.