 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeployment of an Aerial Multi-agent System for Automated Task Execution in Large-scale Underground Mining Environments
Jan 17, 2025



In this article, we present a framework for deploying an aerial multi-agent system in large-scale subterranean environments with minimal infrastructure for supporting multi-agent operations. The multi-agent objective is to optimally and reactively allocate and execute inspection tasks in a mine, which are entered by a mine operator on-the-fly. The assignment of currently available tasks to the team of agents is accomplished through an auction-based system, where the agents bid for available tasks, which are used by a central auctioneer to optimally assigns tasks to agents. A mobile Wi-Fi mesh supports inter-agent communication and bi-directional communication between the agents and the task allocator, while the task execution is performed completely infrastructure-free. Given a task to be accomplished, a reliable and modular agent behavior is synthesized by generating behavior trees from a pool of agent capabilities, using a back-chaining approach. The auction system in the proposed framework is reactive and supports addition of new operator-specified tasks on-the-go, at any point through a user-friendly operator interface. The framework has been validated in a real underground mining environment using three aerial agents, with several inspection locations spread in an environment of almost 200 meters. The proposed framework can be utilized for missions involving rapid inspection, gas detection, distributed sensing and mapping etc. in a subterranean environment. The proposed framework and its field deployment contributes towards furthering reliable automation in large-scale subterranean environments to offload both routine and dangerous tasks from human operators to autonomous aerial robots.
A Tree-based Next-best-trajectory Method for 3D UAV Exploration
Jul 05, 2024



This work presents a fully integrated tree-based combined exploration-planning algorithm: Exploration-RRT (ERRT). The algorithm is focused on providing real-time solutions for local exploration in a fully unknown and unstructured environment while directly incorporating exploratory behavior, robot-safe path planning, and robot actuation into the central problem. ERRT provides a complete sampling and tree-based solution for evaluating "where to go next" by considering a trade-off between maximizing information gain, and minimizing the distances travelled and the robot actuation along the path. The complete scheme is evaluated in extensive simulations, comparisons, as well as real-world field experiments in constrained and narrow subterranean and GPS-denied environments. The framework is fully ROS-integrated, straight-forward to use, and we open-source it at https://github.com/LTU-RAI/ExplorationRRT.
FRAME: A Modular Framework for Autonomous Map-merging: Advancements in the Field
Apr 27, 2024



In this article, a novel approach for merging 3D point cloud maps in the context of egocentric multi-robot exploration is presented. Unlike traditional methods, the proposed approach leverages state-of-the-art place recognition and learned descriptors to efficiently detect overlap between maps, eliminating the need for the time-consuming global feature extraction and feature matching process. The estimated overlapping regions are used to calculate a homogeneous rigid transform, which serves as an initial condition for the GICP point cloud registration algorithm to refine the alignment between the maps. The advantages of this approach include faster processing time, improved accuracy, and increased robustness in challenging environments. Furthermore, the effectiveness of the proposed framework is successfully demonstrated through multiple field missions of robot exploration in a variety of different underground environments.
Reactive Multi-agent Coordination using Auction-based Task Allocation and Behavior Trees
Apr 04, 2023



This article presents an architecture for multi-agent task allocation and task execution, through the unification of a market-inspired task-auctioning system with Behavior Trees for managing and executing lower level behaviors. We consider the scenario with multi-stage tasks, such as 'pick and place', whose arrival times are not known a priori. In such a scenario, a coordinating architecture is expected to be reactive to newly arrived tasks and the resulting rerouting of agents should be dependent on the stage of completion of their current multi-stage tasks. In the novel architecture proposed in this article, a central auctioning system gathers bids (cost-estimates for completing currently available tasks) from all agents, and solves a combinatorial problem to optimally assign tasks to agents. For every agent, it's participation in the auctioning system and execution of an assigned multi-stage task is managed using behavior trees, which switch among several well-defined behaviors in response to changing scenarios. The auctioning system is run at a fixed rate, allowing for newly added tasks to be incorporated into the auctioning system, which makes the solution reactive and allows for the rerouting of some agents (subject to the states of the behavior trees). We demonstrate that the proposed architecture is especially well-suited for multi-stage tasks, where high costs are incurred when rerouting agents who have completed one or more stages of their current tasks. The scalability analysis of the proposed architecture reveals that it scales well with the number of agents and number of tasks. The proposed framework is experimentally validated in multiple scenarios in a lab environment. A video of a demonstration can be viewed at: https://youtu.be/ZdEkoOOlB2g}.
Reactive Navigation of an Unmanned Aerial Vehicle with Perception-based Obstacle Avoidance Constraints
Jul 04, 2022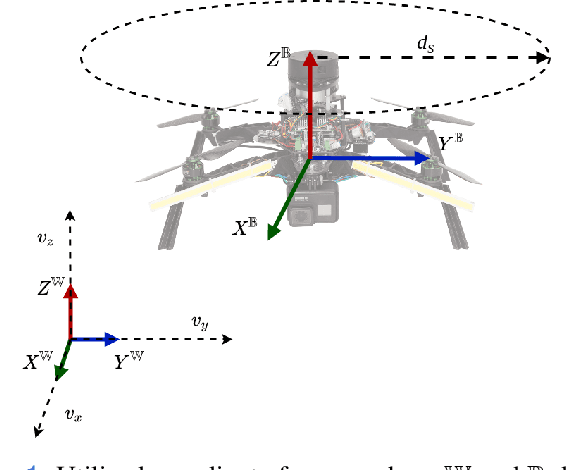
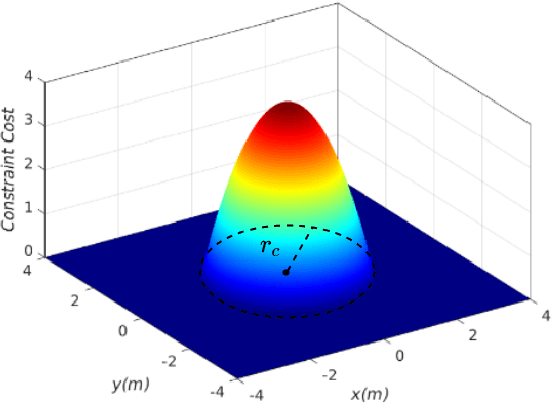
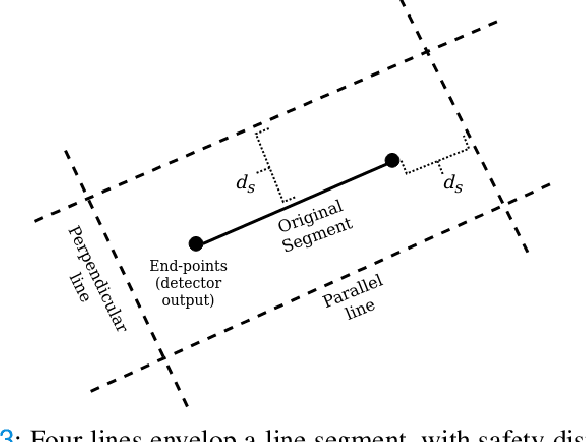
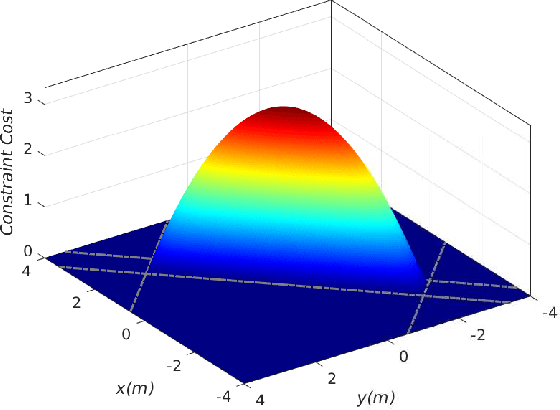
In this article we propose a reactive constrained navigation scheme, with embedded obstacles avoidance for an Unmanned Aerial Vehicle (UAV), for enabling navigation in obstacle-dense environments. The proposed navigation architecture is based on Nonlinear Model Predictive Control (NMPC), and utilizes an on-board 2D LiDAR to detect obstacles and translate online the key geometric information of the environment into parametric constraints for the NMPC that constrain the available position-space for the UAV. This article focuses also on the real-world implementation and experimental validation of the proposed reactive navigation scheme, and it is applied in multiple challenging laboratory experiments, where we also conduct comparisons with relevant methods of reactive obstacle avoidance. The solver utilized in the proposed approach is the Optimization Engine (OpEn) and the Proximal Averaged Newton for Optimal Control (PANOC) algorithm, where a penalty method is applied to properly consider obstacles and input constraints during the navigation task. The proposed novel scheme allows for fast solutions, while using limited on-board computational power, that is a required feature for the overall closed loop performance of an UAV and is applied in multiple real-time scenarios. The combination of built-in obstacle avoidance and real-time applicability makes the proposed reactive constrained navigation scheme an elegant framework for UAVs that is able to perform fast nonlinear control, local path-planning and obstacle avoidance, all embedded in the control layer.
* 16 pages, 28 figures
REF: A Rapid Exploration Framework for Deploying Autonomous MAVs in Unknown Environments
May 31, 2022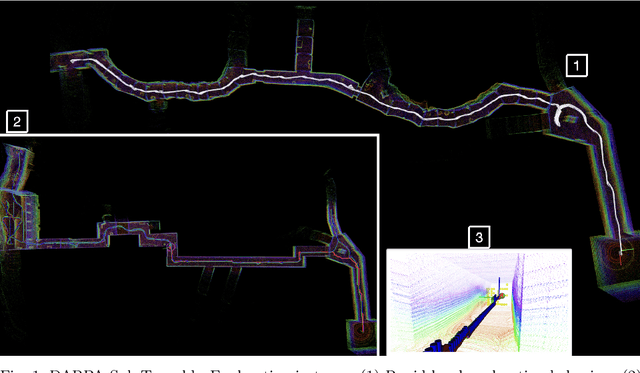
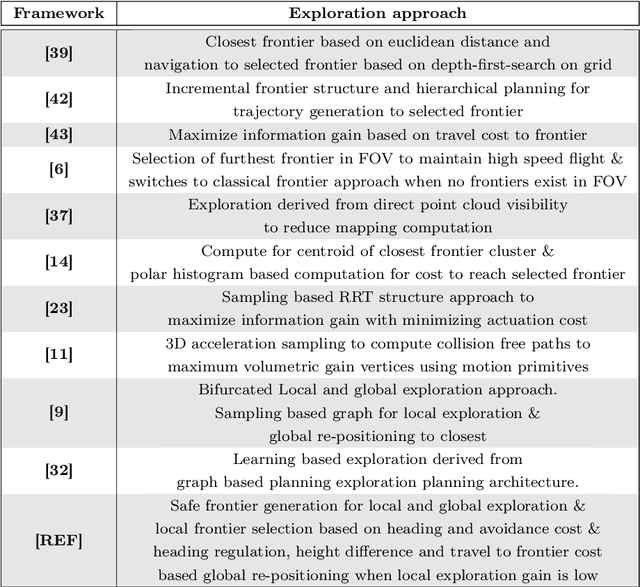
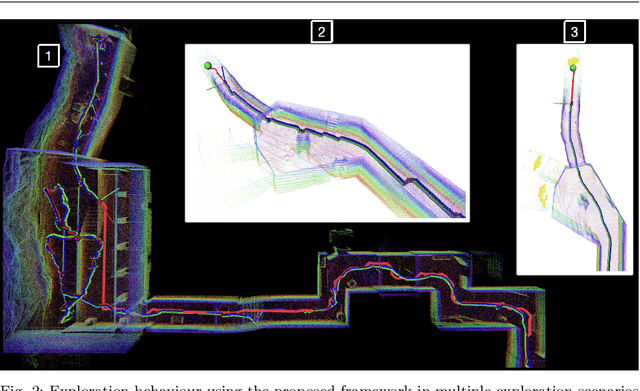
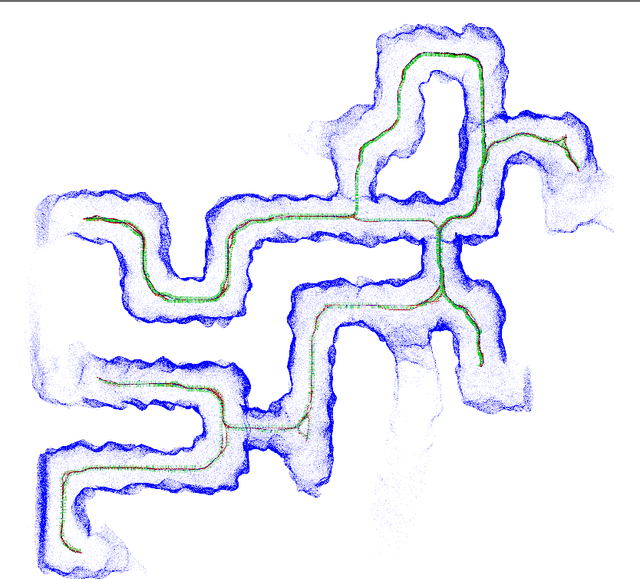
Exploration and mapping of unknown environments is a fundamental task in applications for autonomous robots. In this article, we present a complete framework for deploying MAVs in autonomous exploration missions in unknown subterranean areas. The main motive of exploration algorithms is to depict the next best frontier for the robot such that new ground can be covered in a fast, safe yet efficient manner. The proposed framework uses a novel frontier selection method that also contributes to the safe navigation of autonomous robots in obstructed areas such as subterranean caves, mines, and urban areas. The framework presented in this work bifurcates the exploration problem in local and global exploration. The proposed exploration framework is also adaptable according to computational resources available onboard the robot which means the trade-off between the speed of exploration and the quality of the map can be made. Such capability allows the proposed framework to be deployed in a subterranean exploration, mapping as well as in fast search and rescue scenarios. The overall system is considered a low-complexity and baseline solution for navigation and object localization in tunnel-like environments. The performance of the proposed framework is evaluated in detailed simulation studies with comparisons made against a high-level exploration-planning framework developed for the DARPA Sub-T challenge as it will be presented in this article.
Collision avoidance for multiple MAVs using fast centralized NMPC
Sep 02, 2021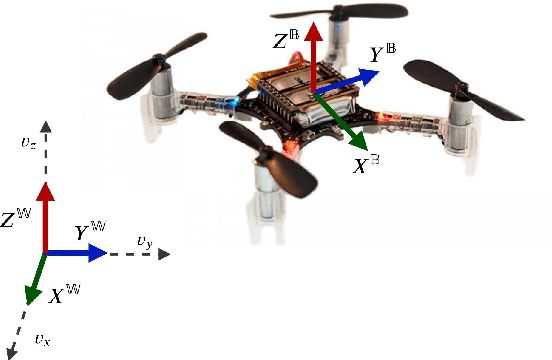
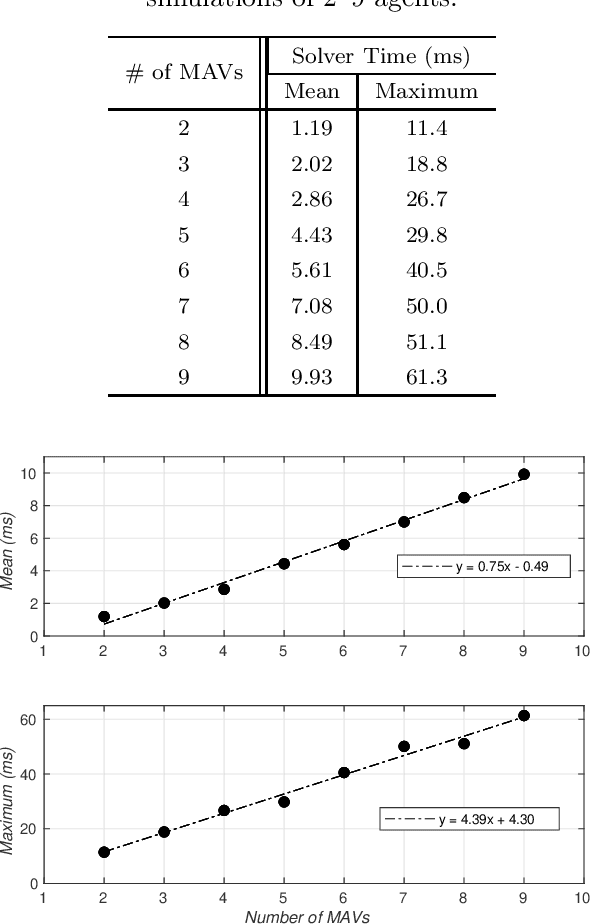
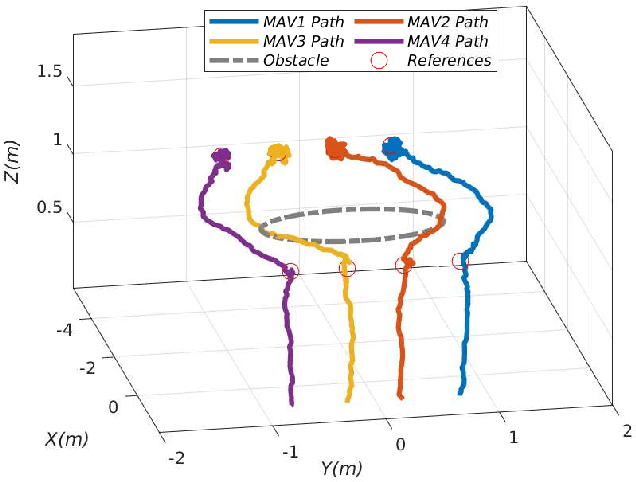
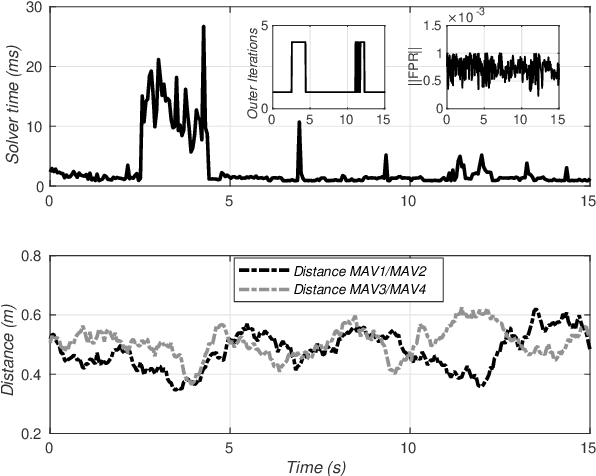
This article proposes a novel control architecture using a centralized nonlinear model predictive control (CNMPC) scheme for controlling multiple micro aerial vehicles (MAVs). The control architecture uses an augmented state system to control multiple agents and performs both obstacle and collision avoidance. The optimization algorithm used is OpEn, based on the proximal averaged Newton type method for optimal control (PANOC) which provides fast convergence for non-convex optimization problems. The objective is to perform position reference tracking for each individual agent, while nonlinear constrains guarantee collision avoidance and smooth control signals. To produce a trajectory that satisfies all constraints a penalty method is applied to the nonlinear constraints. The efficacy of this proposed novel control scheme is successfully demonstrated through simulation results and comparisons, in terms of computation time and constraint violations, while are provided with respect to the number of agents.
* 8 pages, 10 figures
COMPRA: A COMPact Reactive Autonomy framework for subterranean MAV based search-and-rescue operations
Aug 30, 2021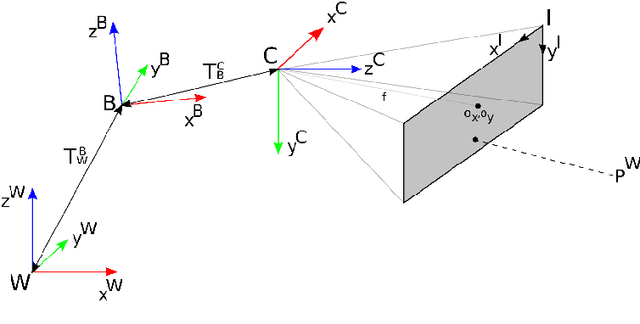
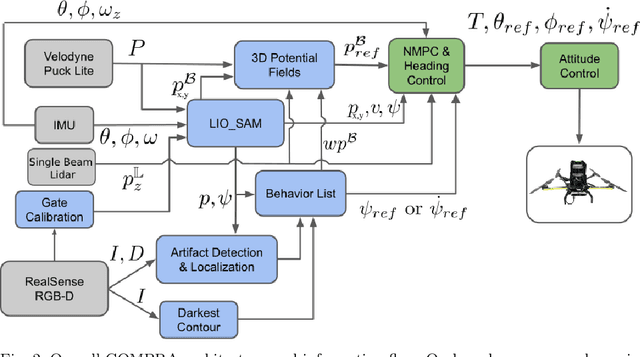
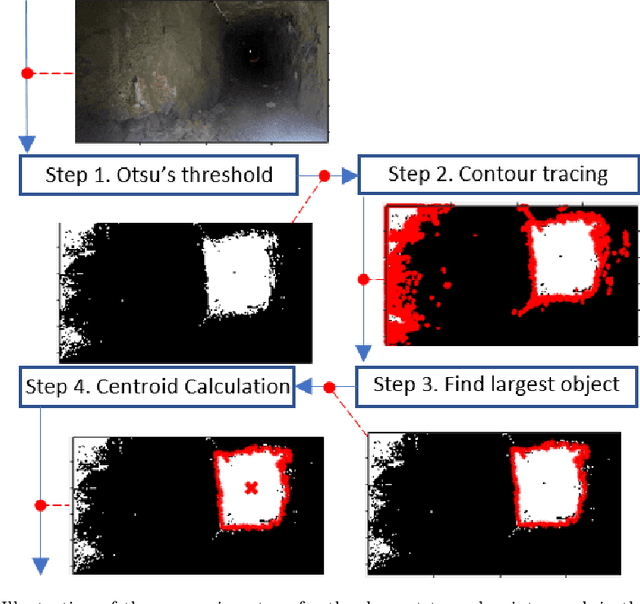

This work establishes COMPRA, a compact and reactive autonomy framework for fast deployment of MAVs in subterranean Search-and-Rescue missions. A COMPRA-enabled MAV is able to autonomously explore previously unknown areas while specific mission criteria are considered e.g. an object of interest is identified and localized, the remaining useful battery life, the overall desired exploration mission duration. The proposed architecture follows a low-complexity algorithmic design to facilitate fully on-board computations, including nonlinear control, state-estimation, navigation, exploration behavior and object localization capabilities. The framework is mainly structured around a reactive local avoidance planner, based on enhanced Potential Field concepts and using instantaneous 3D pointclouds, as well as a computationally efficient heading regulation technique, based on contour detection on an instantaneous camera stream. Those techniques decouple the collision-free path generation from the dependency of a global map and are capable of handling imprecise localization occasions. Field experimental verification of the overall architecture is performed in relevant unknown GPS-denied environments.
A Scalable Distributed Collision Avoidance Scheme for Multi-agent UAV systems
Apr 08, 2021
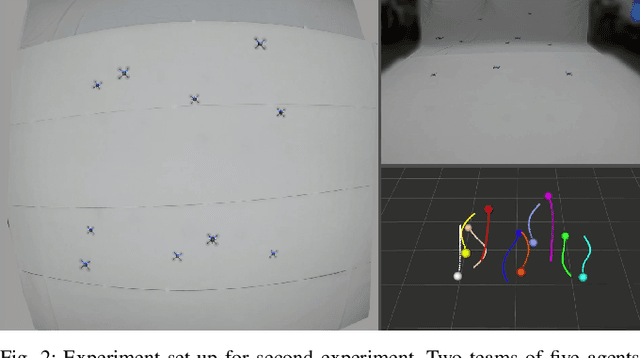
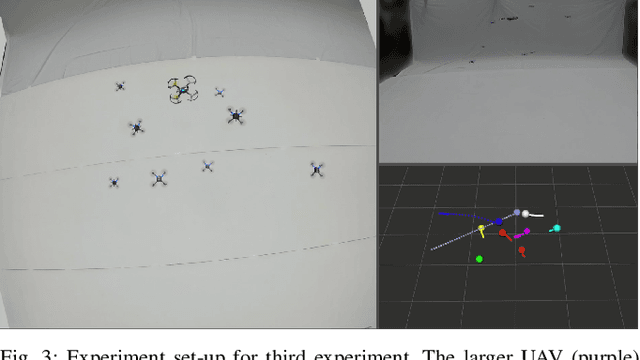
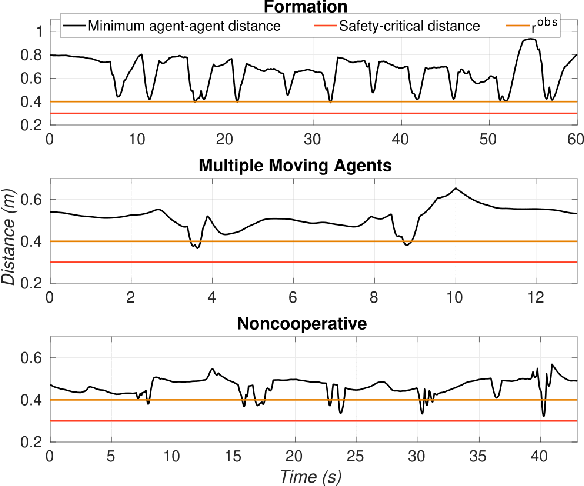
In this article we propose a distributed collision avoidance scheme for multi-agent unmanned aerial vehicles(UAVs) based on nonlinear model predictive control (NMPC),where other agents in the system are considered as dynamic obstacles with respect to the ego agent. Our control scheme operates at a low level and commands roll, pitch and thrust signals at a high frequency, each agent broadcasts its predicted trajectory to the other ones, and we propose an obstacle prioritization scheme based on the shared trajectories to allow up-scaling of the system. The NMPC problem is solved using an ad hoc solver where PANOC is combined with an augmented Lagrangian method to compute collision-free trajectories. We evaluate the proposed scheme in several challenging laboratory experiments for up to ten aerial agents, in dense aerial swarms.
Exploration-RRT: A multi-objective Path Planning and Exploration Framework for Unknown and Unstructured Environments
Apr 08, 2021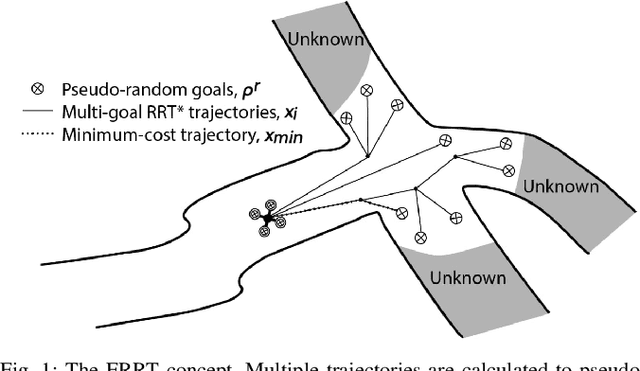
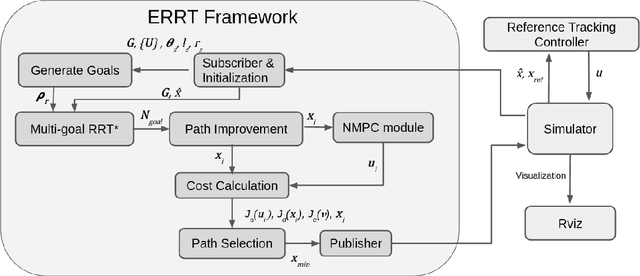
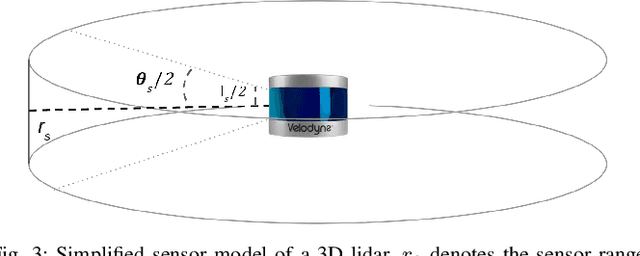
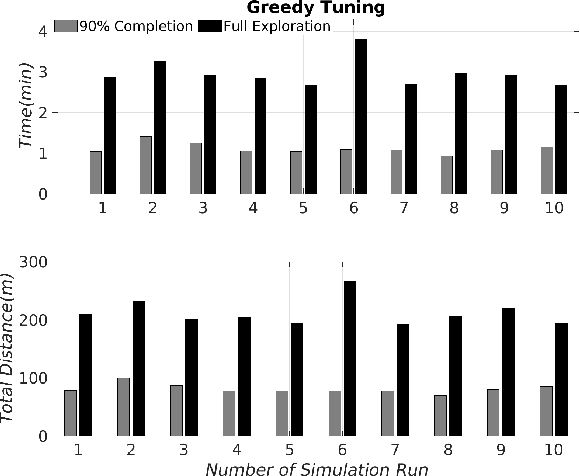
This article establishes the Exploration-RRT algorithm: A novel general-purpose combined exploration and pathplanning algorithm, based on a multi-goal Rapidly-Exploring Random Trees (RRT) framework. Exploration-RRT (ERRT) has been specifically designed for utilization in 3D exploration missions, with partially or completely unknown and unstructured environments. The novel proposed ERRT is based on a multi-objective optimization framework and it is able to take under consideration the potential information gain, the distance travelled, and the actuation costs, along trajectories to pseudo-random goals, generated from considering the on-board sensor model and the non-linear model of the utilized platform. In this article, the algorithmic pipeline of the ERRT will be established and the overall applicability and efficiency of the proposed scheme will be presented on an application with an Unmanned Aerial Vehicle (UAV) model, equipped with a 3D lidar, in a simulated operating environment, with the goal of exploring a completely unknown area as efficiently and quickly as possible