 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGP-VTON: Towards General Purpose Virtual Try-on via Collaborative Local-Flow Global-Parsing Learning
Mar 24, 2023Image-based Virtual Try-ON aims to transfer an in-shop garment onto a specific person. Existing methods employ a global warping module to model the anisotropic deformation for different garment parts, which fails to preserve the semantic information of different parts when receiving challenging inputs (e.g, intricate human poses, difficult garments). Moreover, most of them directly warp the input garment to align with the boundary of the preserved region, which usually requires texture squeezing to meet the boundary shape constraint and thus leads to texture distortion. The above inferior performance hinders existing methods from real-world applications. To address these problems and take a step towards real-world virtual try-on, we propose a General-Purpose Virtual Try-ON framework, named GP-VTON, by developing an innovative Local-Flow Global-Parsing (LFGP) warping module and a Dynamic Gradient Truncation (DGT) training strategy. Specifically, compared with the previous global warping mechanism, LFGP employs local flows to warp garments parts individually, and assembles the local warped results via the global garment parsing, resulting in reasonable warped parts and a semantic-correct intact garment even with challenging inputs.On the other hand, our DGT training strategy dynamically truncates the gradient in the overlap area and the warped garment is no more required to meet the boundary constraint, which effectively avoids the texture squeezing problem. Furthermore, our GP-VTON can be easily extended to multi-category scenario and jointly trained by using data from different garment categories. Extensive experiments on two high-resolution benchmarks demonstrate our superiority over the existing state-of-the-art methods.
Dynamic Graph Enhanced Contrastive Learning for Chest X-ray Report Generation
Mar 18, 2023



Automatic radiology reporting has great clinical potential to relieve radiologists from heavy workloads and improve diagnosis interpretation. Recently, researchers have enhanced data-driven neural networks with medical knowledge graphs to eliminate the severe visual and textual bias in this task. The structures of such graphs are exploited by using the clinical dependencies formed by the disease topic tags via general knowledge and usually do not update during the training process. Consequently, the fixed graphs can not guarantee the most appropriate scope of knowledge and limit the effectiveness. To address the limitation, we propose a knowledge graph with Dynamic structure and nodes to facilitate medical report generation with Contrastive Learning, named DCL. In detail, the fundamental structure of our graph is pre-constructed from general knowledge. Then we explore specific knowledge extracted from the retrieved reports to add additional nodes or redefine their relations in a bottom-up manner. Each image feature is integrated with its very own updated graph before being fed into the decoder module for report generation. Finally, this paper introduces Image-Report Contrastive and Image-Report Matching losses to better represent visual features and textual information. Evaluated on IU-Xray and MIMIC-CXR datasets, our DCL outperforms previous state-of-the-art models on these two benchmarks.
* Accepted by CVPR 2023. Project page: https://github.com/mlii0117/DCL
CapDet: Unifying Dense Captioning and Open-World Detection Pretraining
Mar 15, 2023



Benefiting from large-scale vision-language pre-training on image-text pairs, open-world detection methods have shown superior generalization ability under the zero-shot or few-shot detection settings. However, a pre-defined category space is still required during the inference stage of existing methods and only the objects belonging to that space will be predicted. To introduce a "real" open-world detector, in this paper, we propose a novel method named CapDet to either predict under a given category list or directly generate the category of predicted bounding boxes. Specifically, we unify the open-world detection and dense caption tasks into a single yet effective framework by introducing an additional dense captioning head to generate the region-grounded captions. Besides, adding the captioning task will in turn benefit the generalization of detection performance since the captioning dataset covers more concepts. Experiment results show that by unifying the dense caption task, our CapDet has obtained significant performance improvements (e.g., +2.1% mAP on LVIS rare classes) over the baseline method on LVIS (1203 classes). Besides, our CapDet also achieves state-of-the-art performance on dense captioning tasks, e.g., 15.44% mAP on VG V1.2 and 13.98% on the VG-COCO dataset.
Visual Exemplar Driven Task-Prompting for Unified Perception in Autonomous Driving
Mar 03, 2023Multi-task learning has emerged as a powerful paradigm to solve a range of tasks simultaneously with good efficiency in both computation resources and inference time. However, these algorithms are designed for different tasks mostly not within the scope of autonomous driving, thus making it hard to compare multi-task methods in autonomous driving. Aiming to enable the comprehensive evaluation of present multi-task learning methods in autonomous driving, we extensively investigate the performance of popular multi-task methods on the large-scale driving dataset, which covers four common perception tasks, i.e., object detection, semantic segmentation, drivable area segmentation, and lane detection. We provide an in-depth analysis of current multi-task learning methods under different common settings and find out that the existing methods make progress but there is still a large performance gap compared with single-task baselines. To alleviate this dilemma in autonomous driving, we present an effective multi-task framework, VE-Prompt, which introduces visual exemplars via task-specific prompting to guide the model toward learning high-quality task-specific representations. Specifically, we generate visual exemplars based on bounding boxes and color-based markers, which provide accurate visual appearances of target categories and further mitigate the performance gap. Furthermore, we bridge transformer-based encoders and convolutional layers for efficient and accurate unified perception in autonomous driving. Comprehensive experimental results on the diverse self-driving dataset BDD100K show that the VE-Prompt improves the multi-task baseline and further surpasses single-task models.
Actional Atomic-Concept Learning for Demystifying Vision-Language Navigation
Feb 13, 2023Vision-Language Navigation (VLN) is a challenging task which requires an agent to align complex visual observations to language instructions to reach the goal position. Most existing VLN agents directly learn to align the raw directional features and visual features trained using one-hot labels to linguistic instruction features. However, the big semantic gap among these multi-modal inputs makes the alignment difficult and therefore limits the navigation performance. In this paper, we propose Actional Atomic-Concept Learning (AACL), which maps visual observations to actional atomic concepts for facilitating the alignment. Specifically, an actional atomic concept is a natural language phrase containing an atomic action and an object, e.g., ``go up stairs''. These actional atomic concepts, which serve as the bridge between observations and instructions, can effectively mitigate the semantic gap and simplify the alignment. AACL contains three core components: 1) a concept mapping module to map the observations to the actional atomic concept representations through the VLN environment and the recently proposed Contrastive Language-Image Pretraining (CLIP) model, 2) a concept refining adapter to encourage more instruction-oriented object concept extraction by re-ranking the predicted object concepts by CLIP, and 3) an observation co-embedding module which utilizes concept representations to regularize the observation representations. Our AACL establishes new state-of-the-art results on both fine-grained (R2R) and high-level (REVERIE and R2R-Last) VLN benchmarks. Moreover, the visualization shows that AACL significantly improves the interpretability in action decision.
NLIP: Noise-robust Language-Image Pre-training
Jan 04, 2023



Large-scale cross-modal pre-training paradigms have recently shown ubiquitous success on a wide range of downstream tasks, e.g., zero-shot classification, retrieval and image captioning. However, their successes highly rely on the scale and quality of web-crawled data that naturally contain incomplete and noisy information (e.g., wrong or irrelevant content). Existing works either design manual rules to clean data or generate pseudo-targets as auxiliary signals for reducing noise impact, which do not explicitly tackle both the incorrect and incomplete challenges simultaneously. In this paper, to automatically mitigate the impact of noise by solely mining over existing data, we propose a principled Noise-robust Language-Image Pre-training framework (NLIP) to stabilize pre-training via two schemes: noise-harmonization and noise-completion. First, in noise-harmonization scheme, NLIP estimates the noise probability of each pair according to the memorization effect of cross-modal transformers, then adopts noise-adaptive regularization to harmonize the cross-modal alignments with varying degrees. Second, in noise-completion scheme, to enrich the missing object information of text, NLIP injects a concept-conditioned cross-modal decoder to obtain semantic-consistent synthetic captions to complete noisy ones, which uses the retrieved visual concepts (i.e., objects' names) for the corresponding image to guide captioning generation. By collaboratively optimizing noise-harmonization and noise-completion schemes, our NLIP can alleviate the common noise effects during image-text pre-training in a more efficient way. Extensive experiments show the significant performance improvements of our NLIP using only 26M data over existing pre-trained models (e.g., CLIP, FILIP and BLIP) on 12 zero-shot classification datasets, MSCOCO image captioning and zero-shot image-text retrieval tasks.
UniGeo: Unifying Geometry Logical Reasoning via Reformulating Mathematical Expression
Dec 06, 2022



Geometry problem solving is a well-recognized testbed for evaluating the high-level multi-modal reasoning capability of deep models. In most existing works, two main geometry problems: calculation and proving, are usually treated as two specific tasks, hindering a deep model to unify its reasoning capability on multiple math tasks. However, in essence, these two tasks have similar problem representations and overlapped math knowledge which can improve the understanding and reasoning ability of a deep model on both two tasks. Therefore, we construct a large-scale Unified Geometry problem benchmark, UniGeo, which contains 4,998 calculation problems and 9,543 proving problems. Each proving problem is annotated with a multi-step proof with reasons and mathematical expressions. The proof can be easily reformulated as a proving sequence that shares the same formats with the annotated program sequence for calculation problems. Naturally, we also present a unified multi-task Geometric Transformer framework, Geoformer, to tackle calculation and proving problems simultaneously in the form of sequence generation, which finally shows the reasoning ability can be improved on both two tasks by unifying formulation. Furthermore, we propose a Mathematical Expression Pretraining (MEP) method that aims to predict the mathematical expressions in the problem solution, thus improving the Geoformer model. Experiments on the UniGeo demonstrate that our proposed Geoformer obtains state-of-the-art performance by outperforming task-specific model NGS with over 5.6% and 3.2% accuracies on calculation and proving problems, respectively.
CoupAlign: Coupling Word-Pixel with Sentence-Mask Alignments for Referring Image Segmentation
Dec 04, 2022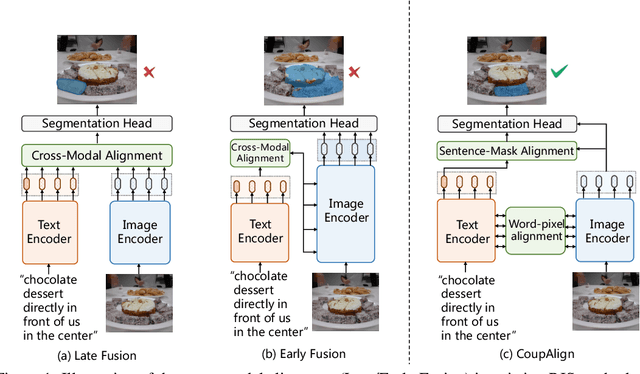
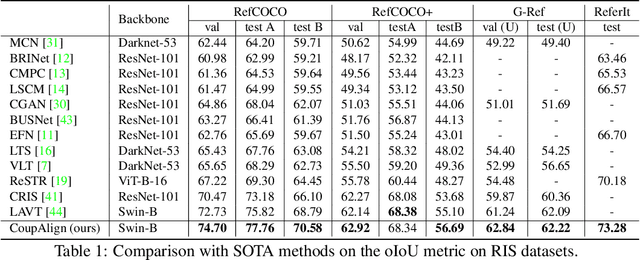
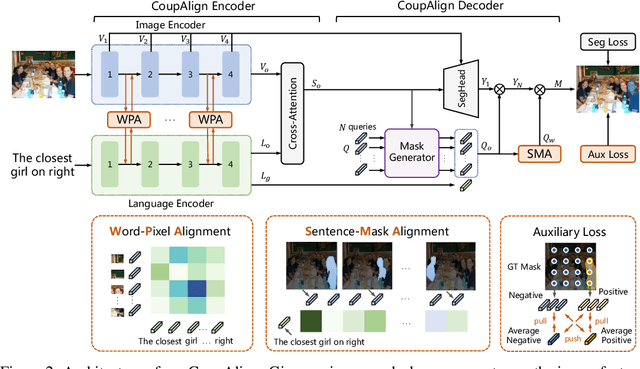

Referring image segmentation aims at localizing all pixels of the visual objects described by a natural language sentence. Previous works learn to straightforwardly align the sentence embedding and pixel-level embedding for highlighting the referred objects, but ignore the semantic consistency of pixels within the same object, leading to incomplete masks and localization errors in predictions. To tackle this problem, we propose CoupAlign, a simple yet effective multi-level visual-semantic alignment method, to couple sentence-mask alignment with word-pixel alignment to enforce object mask constraint for achieving more accurate localization and segmentation. Specifically, the Word-Pixel Alignment (WPA) module performs early fusion of linguistic and pixel-level features in intermediate layers of the vision and language encoders. Based on the word-pixel aligned embedding, a set of mask proposals are generated to hypothesize possible objects. Then in the Sentence-Mask Alignment (SMA) module, the masks are weighted by the sentence embedding to localize the referred object, and finally projected back to aggregate the pixels for the target. To further enhance the learning of the two alignment modules, an auxiliary loss is designed to contrast the foreground and background pixels. By hierarchically aligning pixels and masks with linguistic features, our CoupAlign captures the pixel coherence at both visual and semantic levels, thus generating more accurate predictions. Extensive experiments on popular datasets (e.g., RefCOCO and G-Ref) show that our method achieves consistent improvements over state-of-the-art methods, e.g., about 2% oIoU increase on the validation and testing set of RefCOCO. Especially, CoupAlign has remarkable ability in distinguishing the target from multiple objects of the same class.
3D-TOGO: Towards Text-Guided Cross-Category 3D Object Generation
Dec 02, 2022



Text-guided 3D object generation aims to generate 3D objects described by user-defined captions, which paves a flexible way to visualize what we imagined. Although some works have been devoted to solving this challenging task, these works either utilize some explicit 3D representations (e.g., mesh), which lack texture and require post-processing for rendering photo-realistic views; or require individual time-consuming optimization for every single case. Here, we make the first attempt to achieve generic text-guided cross-category 3D object generation via a new 3D-TOGO model, which integrates a text-to-views generation module and a views-to-3D generation module. The text-to-views generation module is designed to generate different views of the target 3D object given an input caption. prior-guidance, caption-guidance and view contrastive learning are proposed for achieving better view-consistency and caption similarity. Meanwhile, a pixelNeRF model is adopted for the views-to-3D generation module to obtain the implicit 3D neural representation from the previously-generated views. Our 3D-TOGO model generates 3D objects in the form of the neural radiance field with good texture and requires no time-cost optimization for every single caption. Besides, 3D-TOGO can control the category, color and shape of generated 3D objects with the input caption. Extensive experiments on the largest 3D object dataset (i.e., ABO) are conducted to verify that 3D-TOGO can better generate high-quality 3D objects according to the input captions across 98 different categories, in terms of PSNR, SSIM, LPIPS and CLIP-score, compared with text-NeRF and Dreamfields.
Towards Hard-pose Virtual Try-on via 3D-aware Global Correspondence Learning
Nov 25, 2022



In this paper, we target image-based person-to-person virtual try-on in the presence of diverse poses and large viewpoint variations. Existing methods are restricted in this setting as they estimate garment warping flows mainly based on 2D poses and appearance, which omits the geometric prior of the 3D human body shape. Moreover, current garment warping methods are confined to localized regions, which makes them ineffective in capturing long-range dependencies and results in inferior flows with artifacts. To tackle these issues, we present 3D-aware global correspondences, which are reliable flows that jointly encode global semantic correlations, local deformations, and geometric priors of 3D human bodies. Particularly, given an image pair depicting the source and target person, (a) we first obtain their pose-aware and high-level representations via two encoders, and introduce a coarse-to-fine decoder with multiple refinement modules to predict the pixel-wise global correspondence. (b) 3D parametric human models inferred from images are incorporated as priors to regularize the correspondence refinement process so that our flows can be 3D-aware and better handle variations of pose and viewpoint. (c) Finally, an adversarial generator takes the garment warped by the 3D-aware flow, and the image of the target person as inputs, to synthesize the photo-realistic try-on result. Extensive experiments on public benchmarks and our HardPose test set demonstrate the superiority of our method against the SOTA try-on approaches.