 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Wireless Communications through Formal Mathematical AI Reasoning
Apr 28, 2026Mathematical analysis has long underpinned wireless communication theory, yet the growing complexity of next-generation systems demands increasingly sophisticated reasoning from domain experts. Recent advances in AI mathematical reasoning, from formal theorem proving to large language model (LLM)-based derivation, offer a promising but largely unexplored path forward. Here we argue that wireless communications is a uniquely structured domain for formal AI reasoning, and propose a three-layer framework of verification, derivation, and discovery to rethink how wireless mathematical knowledge is established.
Federated Agentic AI for Wireless Networks: Fundamentals, Approaches, and Applications
Mar 02, 2026Agentic artificial intelligence (AI) presents a promising pathway toward realizing autonomous and self-improving wireless network services. However, resource-constrained, widely distributed, and data-heterogeneous nature of wireless networks poses significant challenges to existing agentic AI that relies on centralized architectures, leading to high communication overhead, privacy risks, and non-independent and identically distributed (non-IID) data. Federated learning (FL) has the potential to improve the overall loop of agentic AI through collaborative local learning and parameter sharing without exchanging raw data. This paper proposes new federated agentic AI approaches for wireless networks. We first summarize fundamentals of agentic AI and mainstream FL types. Then, we illustrate how each FL type can strengthen a specific component of agentic AI's loop. Moreover, we conduct a case study on using FRL to improve the performance of agentic AI's action decision in low-altitude wireless networks (LAWNs). Finally, we provide a conclusion and discuss future research directions.
Wireless Context Engineering for Efficient Mobile Agentic AI and Edge General Intelligence
Feb 07, 2026Future wireless networks demand increasingly powerful intelligence to support sensing, communication, and autonomous decision-making. While scaling laws suggest improving performance by enlarging model capacity, practical edge deployments are fundamentally constrained by latency, energy, and memory, making unlimited model scaling infeasible. This creates a critical need to maximize the utility of limited inference-time inputs by filtering redundant observations and focusing on high-impact data. In large language models and generative artificial intelligence (AI), context engineering has emerged as a key paradigm to guide inference by selectively structuring and injecting task-relevant information. Inspired by this success, we extend context engineering to wireless systems, providing a systematic way to enhance edge AI performance without increasing model complexity. In dynamic environments, for example, beam prediction can benefit from augmenting instantaneous channel measurements with contextual cues such as user mobility trends or environment-aware propagation priors. We formally introduce wireless context engineering and propose a Wireless Context Communication Framework (WCCF) to adaptively orchestrate wireless context under inference-time constraints. This work provides researchers with a foundational perspective and practical design dimensions to manage the wireless context of wireless edge intelligence. An ISAC-enabled beam prediction case study illustrates the effectiveness of the proposed paradigm under constrained sensing budgets.
Lyapunov Stability-Aware Stackelberg Game for Low-Altitude Economy: A Control-Oriented Pruning-Based DRL Approach
Feb 01, 2026With the rapid expansion of the low-altitude economy, Unmanned Aerial Vehicles (UAVs) serve as pivotal aerial base stations supporting diverse services from users, ranging from latency-sensitive critical missions to bandwidth-intensive data streaming. However, the efficacy of such heterogeneous networks is often compromised by the conflict between limited onboard resources and stringent stability requirements. Moving beyond traditional throughput-centric designs, we propose a Sensing-Communication-Computing-Control closed-loop framework that explicitly models the impact of communication latency on physical control stability. To guarantee mission reliability, we leverage the Lyapunov stability theory to derive an intrinsic mapping between the state evolution of the control system and communication constraints, transforming abstract stability requirements into quantifiable resource boundaries. Then, we formulate the resource allocation problem as a Stackelberg game, where UAVs (as leaders) dynamically price resources to balance load and ensure stability, while users (as followers) optimize requests based on service urgency. Furthermore, addressing the prohibitive computational overhead of standard Deep Reinforcement Learning (DRL) on energy-constrained edge platforms, we propose a novel and lightweight pruning-based Proximal Policy Optimization (PPO) algorithm. By integrating a dynamic structured pruning mechanism, the proposed algorithm significantly compresses the neural network scale during training, enabling the UAV to rapidly approximate the game equilibrium with minimal inference latency. Simulation results demonstrate that the proposed scheme effectively secures control loop stability while maximizing system utility in dynamic low-altitude environments.
Reconfigurable Airspace: Synergizing Movable Antenna and Intelligent Surface for Low-Altitude ISAC Networks
Nov 13, 2025Low-altitude unmanned aerial vehicle (UAV) networks are integral to future 6G integrated sensing and communication (ISAC) systems. However, their deployment is hindered by challenges stemming from high mobility of UAVs, complex propagation environments, and the inherent trade-offs between coexisting sensing and communication functions. This article proposes a novel framework that leverages movable antennas (MAs) and intelligent reflecting surfaces (IRSs) as dual enablers to overcome these limitations. MAs, through active transceiver reconfiguration, and IRSs, via passive channel reconstruction, can work in synergy to significantly enhance system performance. Our analysis first elaborates on the fundamental gains offered by MAs and IRSs, and provides simulation results that validate the immense potential of the MA-IRS-enabled ISAC architecture. Two core UAV deployment scenarios are then investigated: (i) UAVs as ISAC users, where we focus on achieving high-precision tracking and aerial safety, and (ii) UAVs as aerial network nodes, where we address robust design and complex coupled resource optimization. Finally, key technical challenges and research opportunities are identified and analyzed for each scenario, charting a clear course for the future design of advanced low-altitude ISAC networks.
Stackelberg Game-Driven Defense for ISAC Against Channel Attacks in Low-Altitude Networks
Nov 09, 2025The increasing saturation of terrestrial resources has driven economic activities into low-altitude airspace. These activities, such as air taxis, rely on low-altitude wireless networks, and one key enabling technology is integrated sensing and communication (ISAC). However, in low-altitude airspace, ISAC is vulnerable to channel-access attacks, thereby degrading performance and threatening safety. To address this, we propose a defense framework based on a Stackelberg game. Specifically, we first model the system under attack, deriving metrics for the communication and the sensing to quantify performance. Then, we formulate the interaction as a three-player game where a malicious attacker acts as the leader, while the legitimate drone and ground base station act as followers. Using a backward induction algorithm, we obtain the Stackelberg equilibrium, allowing the defenders to dynamically adjust their strategies to mitigate the attack. Simulation results verify that the proposed algorithm converges to a stable solution and outperforms existing baselines, ensuring reliable ISAC performance for critical low-altitude applications.
Agentic Graph Neural Networks for Wireless Communications and Networking Towards Edge General Intelligence: A Survey
Aug 12, 2025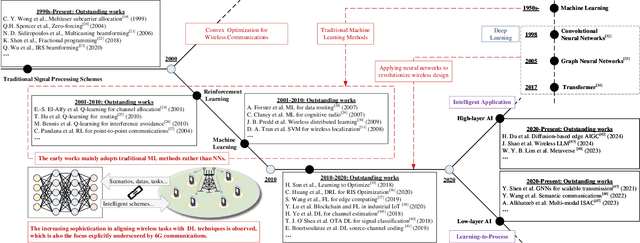
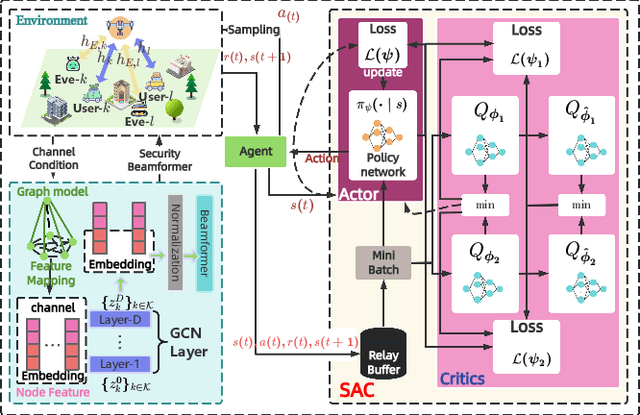
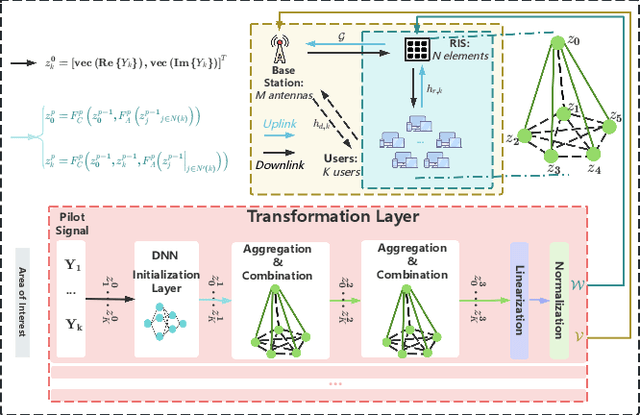
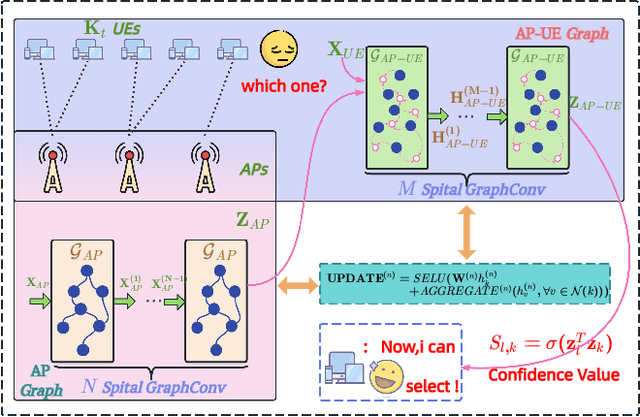
The rapid advancement of communication technologies has driven the evolution of communication networks towards both high-dimensional resource utilization and multifunctional integration. This evolving complexity poses significant challenges in designing communication networks to satisfy the growing quality-of-service and time sensitivity of mobile applications in dynamic environments. Graph neural networks (GNNs) have emerged as fundamental deep learning (DL) models for complex communication networks. GNNs not only augment the extraction of features over network topologies but also enhance scalability and facilitate distributed computation. However, most existing GNNs follow a traditional passive learning framework, which may fail to meet the needs of increasingly diverse wireless systems. This survey proposes the employment of agentic artificial intelligence (AI) to organize and integrate GNNs, enabling scenario- and task-aware implementation towards edge general intelligence. To comprehend the full capability of GNNs, we holistically review recent applications of GNNs in wireless communications and networking. Specifically, we focus on the alignment between graph representations and network topologies, and between neural architectures and wireless tasks. We first provide an overview of GNNs based on prominent neural architectures, followed by the concept of agentic GNNs. Then, we summarize and compare GNN applications for conventional systems and emerging technologies, including physical, MAC, and network layer designs, integrated sensing and communication (ISAC), reconfigurable intelligent surface (RIS) and cell-free network architecture. We further propose a large language model (LLM) framework as an intelligent question-answering agent, leveraging this survey as a local knowledge base to enable GNN-related responses tailored to wireless communication research.
Advancing the Control of Low-Altitude Wireless Networks: Architecture, Design Principles, and Future Directions
Aug 11, 2025



This article introduces a control-oriented low-altitude wireless network (LAWN) that integrates near-ground communications and remote estimation of the internal system state. This integration supports reliable networked control in dynamic aerial-ground environments. First, we introduce the network's modular architecture and key performance metrics. Then, we discuss core design trade-offs across the control, communication, and estimation layers. A case study illustrates closed-loop coordination under wireless constraints. Finally, we outline future directions for scalable, resilient LAWN deployments in real-time and resource-constrained scenarios.
Secure Transmission for Cell-Free Symbiotic Radio Communications with Movable Antenna: Continuous and Discrete Positioning Designs
Aug 09, 2025



In this paper, we study a movable antenna (MA) empowered secure transmission scheme for reconfigurable intelligent surface (RIS) aided cell-free symbiotic radio (SR) system. Specifically, the MAs deployed at distributed access points (APs) work collaboratively with the RIS to establish high-quality propagation links for both primary and secondary transmissions, as well as suppressing the risk of eavesdropping on confidential primary information. We consider both continuous and discrete MA position cases and maximize the secrecy rate of primary transmission under the secondary transmission constraints, respectively. For the continuous position case, we propose a two-layer iterative optimization method based on differential evolution with one-in-one representation (DEO), to find a high-quality solution with relatively moderate computational complexity. For the discrete position case, we first extend the DEO based iterative framework by introducing the mapping and determination operations to handle the characteristic of discrete MA positions. To further reduce the computational complexity, we then design an alternating optimization (AO) iterative framework to solve all variables within a single layer. In particular, we develop an efficient strategy to derive the sub-optimal solution for the discrete MA positions, superseding the DEO-based method. Numerical results validate the effectiveness of the proposed MA empowered secure transmission scheme along with its optimization algorithms.
Predictive Control over LAWN: Joint Trajectory Design and Resource Allocation
Jul 03, 2025



Low-altitude wireless networks (LAWNs) have been envisioned as flexible and transformative platforms for enabling delay-sensitive control applications in Internet of Things (IoT) systems. In this work, we investigate the real-time wireless control over a LAWN system, where an aerial drone is employed to serve multiple mobile automated guided vehicles (AGVs) via finite blocklength (FBL) transmission. Toward this end, we adopt the model predictive control (MPC) to ensure accurate trajectory tracking, while we analyze the communication reliability using the outage probability. Subsequently, we formulate an optimization problem to jointly determine control policy, transmit power allocation, and drone trajectory by accounting for the maximum travel distance and control input constraints. To address the resultant non-convex optimization problem, we first derive the closed-form expression of the outage probability under FBL transmission. Based on this, we reformulate the original problem as a quadratic programming (QP) problem, followed by developing an alternating optimization (AO) framework. Specifically, we employ the projected gradient descent (PGD) method and the successive convex approximation (SCA) technique to achieve computationally efficient sub-optimal solutions. Furthermore, we thoroughly analyze the convergence and computational complexity of the proposed algorithm. Extensive simulations and AirSim-based experiments are conducted to validate the superiority of our proposed approach compared to the baseline schemes in terms of control performance.