 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgentic Trading: When LLM Agents Meet Financial Markets
May 19, 2026A growing body of work explores how Large Language Models (LLMs) can be embedded in trading systems as agents that perceive market information, retrieve context, reason about decisions, emit tradable actions, and adapt under market feedback. This paper reframes LLM-based trading agents as expert-system decision pipelines and presents an audit-oriented evidence map of 77 included studies in a protocol-coded snapshot screened through 2026-03-09. A primary empirical subset (n=19) satisfies the minimum boundary of Action Output plus Closed-Loop Evaluation; the remaining 58 included studies are retained as background and design context. The central empirical finding is protocol incomparability: within the primary subset, only 2/19 studies report extractable time-consistent split protocols, 1/19 reports an explicit transaction-cost model, 1/19 documents universe or survivorship handling, 11/19 report execution timing or semantics, 15/19 are coded as R0, and no study reaches R3 reproducibility. We therefore use Architecture-Capability-Adaptation as a working analytical lens rather than a validated taxonomy, and we foreground the evidence ledger, reproducibility audit, and reporting checklist as the main contributions. The resulting survey shows that architectural experimentation is expanding rapidly, while comparable evaluation protocols, execution semantics, and reproducible artifacts remain the field's immediate bottlenecks.
TimberAgent: Gram-Guided Retrieval for Executable Music Effect Control
Mar 10, 2026Digital audio workstations expose rich effect chains, yet a semantic gap remains between perceptual user intent and low-level signal-processing parameters. We study retrieval-grounded audio effect control, where the output is an editable plugin configuration rather than a finalized waveform. Our focus is Texture Resonance Retrieval (TRR), an audio representation built from Gram matrices of projected mid-level Wav2Vec2 activations. This design preserves texture-relevant co-activation structure. We evaluate TRR on a guitar-effects benchmark with 1,063 candidate presets and 204 queries. The evaluation follows Protocol-A, a cross-validation scheme that prevents train-test leakage. We compare TRR against CLAP and internal retrieval baselines (Wav2Vec-RAG, Text-RAG, FeatureNN-RAG), using min-max normalized metrics grounded in physical DSP parameter ranges. Ablation studies validate TRR's core design choices: projection dimensionality, layer selection, and projection type. A near-duplicate sensitivity analysis confirms that results are robust to trivial knowledge-base matches. TRR achieves the lowest normalized parameter error among evaluated methods. A multiple-stimulus listening study with 26 participants provides complementary perceptual evidence. We interpret these results as benchmark evidence that texture-aware retrieval is useful for editable audio effect control, while broader personalization and real-audio robustness claims remain outside the verified evidence presented here.
Agentic Peer-to-Peer Networks: From Content Distribution to Capability and Action Sharing
Mar 04, 2026The ongoing shift of AI models from centralized cloud APIs to local AI agents on edge devices is enabling \textit{Client-Side Autonomous Agents (CSAAs)} -- persistent personal agents that can plan, access local context, and invoke tools on behalf of users. As these agents begin to collaborate by delegating subtasks directly between clients, they naturally form \emph{Agentic Peer-to-Peer (P2P) Networks}. Unlike classic file-sharing overlays where the exchanged object is static, hash-indexed content (e.g., files in BitTorrent), agentic overlays exchange \emph{capabilities and actions} that are heterogeneous, state-dependent, and potentially unsafe if delegated to untrusted peers. This article outlines the networking foundations needed to make such collaboration practical. We propose a plane-based reference architecture that decouples connectivity/identity, semantic discovery, and execution. Besides, we introduce signed, soft-state capability descriptors to support intent- and constraint-aware discovery. To cope with adversarial settings, we further present a \textit{tiered verification} spectrum: Tier~1 relies on reputation signals, Tier~2 applies lightweight canary challenge-response with fallback selection, and Tier~3 requires evidence packages such as signed tool receipts/traces (and, when applicable, attestation). Using a discrete-event simulator that models registry-based discovery, Sybil-style index poisoning, and capability drift, we show that tiered verification substantially improves end-to-end workflow success while keeping discovery latency near-constant and control-plane overhead modest.
Agentic Graph Neural Networks for Wireless Communications and Networking Towards Edge General Intelligence: A Survey
Aug 12, 2025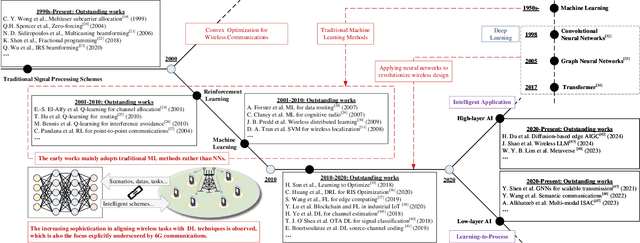
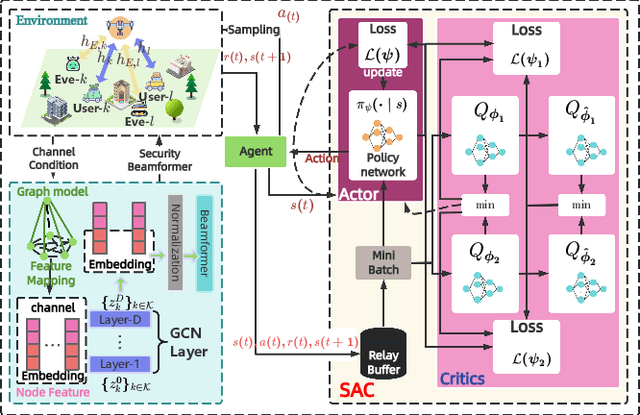
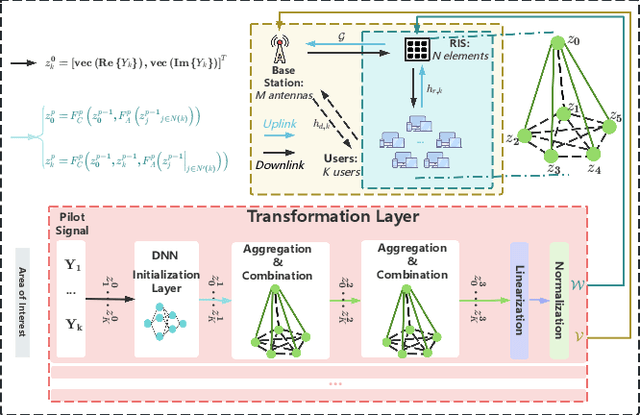
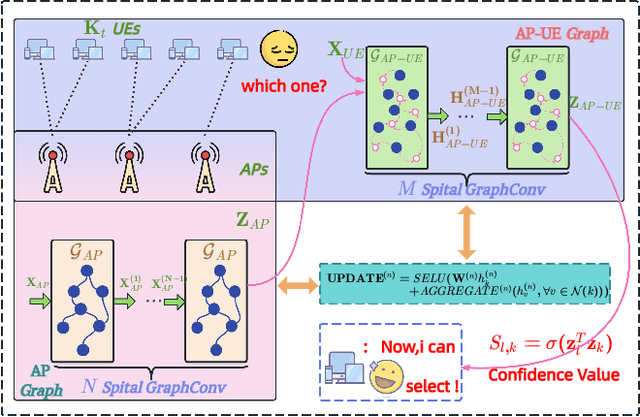
The rapid advancement of communication technologies has driven the evolution of communication networks towards both high-dimensional resource utilization and multifunctional integration. This evolving complexity poses significant challenges in designing communication networks to satisfy the growing quality-of-service and time sensitivity of mobile applications in dynamic environments. Graph neural networks (GNNs) have emerged as fundamental deep learning (DL) models for complex communication networks. GNNs not only augment the extraction of features over network topologies but also enhance scalability and facilitate distributed computation. However, most existing GNNs follow a traditional passive learning framework, which may fail to meet the needs of increasingly diverse wireless systems. This survey proposes the employment of agentic artificial intelligence (AI) to organize and integrate GNNs, enabling scenario- and task-aware implementation towards edge general intelligence. To comprehend the full capability of GNNs, we holistically review recent applications of GNNs in wireless communications and networking. Specifically, we focus on the alignment between graph representations and network topologies, and between neural architectures and wireless tasks. We first provide an overview of GNNs based on prominent neural architectures, followed by the concept of agentic GNNs. Then, we summarize and compare GNN applications for conventional systems and emerging technologies, including physical, MAC, and network layer designs, integrated sensing and communication (ISAC), reconfigurable intelligent surface (RIS) and cell-free network architecture. We further propose a large language model (LLM) framework as an intelligent question-answering agent, leveraging this survey as a local knowledge base to enable GNN-related responses tailored to wireless communication research.
Zero-Knowledge Federated Learning: A New Trustworthy and Privacy-Preserving Distributed Learning Paradigm
Mar 18, 2025


Federated Learning (FL) has emerged as a promising paradigm in distributed machine learning, enabling collaborative model training while preserving data privacy. However, despite its many advantages, FL still contends with significant challenges -- most notably regarding security and trust. Zero-Knowledge Proofs (ZKPs) offer a potential solution by establishing trust and enhancing system integrity throughout the FL process. Although several studies have explored ZKP-based FL (ZK-FL), a systematic framework and comprehensive analysis are still lacking. This article makes two key contributions. First, we propose a structured ZK-FL framework that categorizes and analyzes the technical roles of ZKPs across various FL stages and tasks. Second, we introduce a novel algorithm, Verifiable Client Selection FL (Veri-CS-FL), which employs ZKPs to refine the client selection process. In Veri-CS-FL, participating clients generate verifiable proofs for the performance metrics of their local models and submit these concise proofs to the server for efficient verification. The server then selects clients with high-quality local models for uploading, subsequently aggregating the contributions from these selected clients. By integrating ZKPs, Veri-CS-FL not only ensures the accuracy of performance metrics but also fortifies trust among participants while enhancing the overall efficiency and security of FL systems.
A Survey of Zero-Knowledge Proof Based Verifiable Machine Learning
Feb 25, 2025



As machine learning technologies advance rapidly across various domains, concerns over data privacy and model security have grown significantly. These challenges are particularly pronounced when models are trained and deployed on cloud platforms or third-party servers due to the computational resource limitations of users' end devices. In response, zero-knowledge proof (ZKP) technology has emerged as a promising solution, enabling effective validation of model performance and authenticity in both training and inference processes without disclosing sensitive data. Thus, ZKP ensures the verifiability and security of machine learning models, making it a valuable tool for privacy-preserving AI. Although some research has explored the verifiable machine learning solutions that exploit ZKP, a comprehensive survey and summary of these efforts remain absent. This survey paper aims to bridge this gap by reviewing and analyzing all the existing Zero-Knowledge Machine Learning (ZKML) research from June 2017 to December 2024. We begin by introducing the concept of ZKML and outlining its ZKP algorithmic setups under three key categories: verifiable training, verifiable inference, and verifiable testing. Next, we provide a comprehensive categorization of existing ZKML research within these categories and analyze the works in detail. Furthermore, we explore the implementation challenges faced in this field and discuss the improvement works to address these obstacles. Additionally, we highlight several commercial applications of ZKML technology. Finally, we propose promising directions for future advancements in this domain.
Unseen Attack Detection in Software-Defined Networking Using a BERT-Based Large Language Model
Dec 09, 2024Software defined networking (SDN) represents a transformative shift in network architecture by decoupling the control plane from the data plane, enabling centralized and flexible management of network resources. However, this architectural shift introduces significant security challenges, as SDN's centralized control becomes an attractive target for various types of attacks. While current research has yielded valuable insights into attack detection in SDN, critical gaps remain. Addressing challenges in feature selection, broadening the scope beyond DDoS attacks, strengthening attack decisions based on multi flow analysis, and building models capable of detecting unseen attacks that they have not been explicitly trained on are essential steps toward advancing security in SDN. In this paper, we introduce a novel approach that leverages Natural Language Processing (NLP) and the pre trained BERT base model to enhance attack detection in SDN. Our approach transforms network flow data into a format interpretable by language models, allowing BERT to capture intricate patterns and relationships within network traffic. By using Random Forest for feature selection, we optimize model performance and reduce computational overhead, ensuring accurate detection. Attack decisions are made based on several flows, providing stronger and more reliable detection of malicious traffic. Furthermore, our approach is specifically designed to detect previously unseen attacks, offering a solution for identifying threats that the model was not explicitly trained on. To rigorously evaluate our approach, we conducted experiments in two scenarios: one focused on detecting known attacks, achieving 99.96% accuracy, and another on detecting unseen attacks, where our model achieved 99.96% accuracy, demonstrating the robustness of our approach in detecting evolving threats to improve the security of SDN networks.
A deep-learning-based MAC for integrating channel access, rate adaptation and channel switch
Jun 04, 2024



With increasing density and heterogeneity in unlicensed wireless networks, traditional MAC protocols, such as carrier-sense multiple access with collision avoidance (CSMA/CA) in Wi-Fi networks, are experiencing performance degradation. This is manifested in increased collisions and extended backoff times, leading to diminished spectrum efficiency and protocol coordination. Addressing these issues, this paper proposes a deep-learning-based MAC paradigm, dubbed DL-MAC, which leverages spectrum sensing data readily available from energy detection modules in wireless devices to achieve the MAC functionalities of channel access, rate adaptation and channel switch. First, we utilize DL-MAC to realize a joint design of channel access and rate adaptation. Subsequently, we integrate the capability of channel switch into DL-MAC, enhancing its functionality from single-channel to multi-channel operation. Specifically, the DL-MAC protocol incorporates a deep neural network (DNN) for channel selection and a recurrent neural network (RNN) for the joint design of channel access and rate adaptation. We conducted real-world data collection within the 2.4 GHz frequency band to validate the effectiveness of DL-MAC, and our experiments reveal that DL-MAC exhibits superior performance over traditional algorithms in both single and multi-channel environments and also outperforms single-function approaches in terms of overall performance. Additionally, the performance of DL-MAC remains robust, unaffected by channel switch overhead within the evaluated range.
DedustNet: A Frequency-dominated Swin Transformer-based Wavelet Network for Agricultural Dust Removal
Jan 09, 2024



While dust significantly affects the environmental perception of automated agricultural machines, the existing deep learning-based methods for dust removal require further research and improvement in this area to improve the performance and reliability of automated agricultural machines in agriculture. We propose an end-to-end trainable learning network (DedustNet) to solve the real-world agricultural dust removal task. To our knowledge, DedustNet is the first time Swin Transformer-based units have been used in wavelet networks for agricultural image dusting. Specifically, we present the frequency-dominated block (DWTFormer block and IDWTFormer block) by adding a spatial features aggregation scheme (SFAS) to the Swin Transformer and combining it with the wavelet transform, the DWTFormer block and IDWTFormer block, alleviating the limitation of the global receptive field of Swin Transformer when dealing with complex dusty backgrounds. Furthermore, We propose a cross-level information fusion module to fuse different levels of features and effectively capture global and long-range feature relationships. In addition, we present a dilated convolution module to capture contextual information guided by wavelet transform at multiple scales, which combines the advantages of wavelet transform and dilated convolution. Our algorithm leverages deep learning techniques to effectively remove dust from images while preserving the original structural and textural features. Compared to existing state-of-the-art methods, DedustNet achieves superior performance and more reliable results in agricultural image dedusting, providing strong support for the application of agricultural machinery in dusty environments. Additionally, the impressive performance on real-world hazy datasets and application tests highlights DedustNet superior generalization ability and computer vision-related application performance.
WaveletFormerNet: A Transformer-based Wavelet Network for Real-world Non-homogeneous and Dense Fog Removal
Jan 09, 2024



Although deep convolutional neural networks have achieved remarkable success in removing synthetic fog, it is essential to be able to process images taken in complex foggy conditions, such as dense or non-homogeneous fog, in the real world. However, the haze distribution in the real world is complex, and downsampling can lead to color distortion or loss of detail in the output results as the resolution of a feature map or image resolution decreases. In addition to the challenges of obtaining sufficient training data, overfitting can also arise in deep learning techniques for foggy image processing, which can limit the generalization abilities of the model, posing challenges for its practical applications in real-world scenarios. Considering these issues, this paper proposes a Transformer-based wavelet network (WaveletFormerNet) for real-world foggy image recovery. We embed the discrete wavelet transform into the Vision Transformer by proposing the WaveletFormer and IWaveletFormer blocks, aiming to alleviate texture detail loss and color distortion in the image due to downsampling. We introduce parallel convolution in the Transformer block, which allows for the capture of multi-frequency information in a lightweight mechanism. Additionally, we have implemented a feature aggregation module (FAM) to maintain image resolution and enhance the feature extraction capacity of our model, further contributing to its impressive performance in real-world foggy image recovery tasks. Extensive experiments demonstrate that our WaveletFormerNet performs better than state-of-the-art methods, as shown through quantitative and qualitative evaluations of minor model complexity. Additionally, our satisfactory results on real-world dust removal and application tests showcase the superior generalization ability and improved performance of WaveletFormerNet in computer vision-related applications.