 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVAG: Dual-Stream Video-Action Generation for Embodied Data Synthesis
Apr 10, 2026Recent advances in robot foundation models trained on large-scale human teleoperation data have enabled robots to perform increasingly complex real-world tasks. However, scaling these systems remains difficult because collecting task-specific demonstrations is expensive and labor-intensive. Synthetic data, especially generated videos, offer a promising direction, but existing World Models (WMs) are not directly suitable for policy learning since they do not provide paired action trajectories. World-Action (WA) models partially address this by predicting actions with visual outputs, yet often lack strong video-action alignment, while two-stage pipelines that generate video first and then infer actions introduce inefficiency and error accumulation. To address these limitations, we propose VAG, a unified flow-matching-based dual-stream framework that jointly generates video and action under visual and language conditioning. By synchronizing denoising in both branches and using an adaptive 3D pooling mechanism to transfer compact global video context to the action branch, VAG improves cross-modal consistency during generation. Across both simulated and real-world settings, VAG produces aligned video-action pairs with competitive prediction quality, supports executable trajectory replay, and provides useful synthetic pretraining data that improves downstream policy generalization, indicating its potential as a practical world-action model for embodied data synthesis.
GigaWorld-Policy: An Efficient Action-Centered World--Action Model
Mar 18, 2026World-Action Models (WAM) initialized from pre-trained video generation backbones have demonstrated remarkable potential for robot policy learning. However, existing approaches face two critical bottlenecks that hinder performance and deployment. First, jointly reasoning over future visual dynamics and corresponding actions incurs substantial inference overhead. Second, joint modeling often entangles visual and motion representations, making motion prediction accuracy heavily dependent on the quality of future video forecasts. To address these issues, we introduce GigaWorld-Policy, an action-centered WAM that learns 2D pixel-action dynamics while enabling efficient action decoding, with optional video generation. Specifically, we formulate policy training into two coupled components: the model predicts future action sequences conditioned on the current observation, and simultaneously generates future videos conditioned on the predicted actions and the same observation. The policy is supervised by both action prediction and video generation, providing richer learning signals and encouraging physically plausible actions through visual-dynamics constraints. With a causal design that prevents future-video tokens from influencing action tokens, explicit future-video generation is optional at inference time, allowing faster action prediction during deployment. To support this paradigm, we curate a diverse, large-scale robot dataset to pre-train an action-centered video generation model, which is then adapted as the backbone for robot policy learning. Experimental results on real-world robotic platforms show that GigaWorld-Policy runs 9x faster than the leading WAM baseline, Motus, while improving task success rates by 7%. Moreover, compared with pi-0.5, GigaWorld-Policy improves performance by 95% on RoboTwin 2.0.
TacMamba: A Tactile History Compression Adapter Bridging Fast Reflexes and Slow VLA Reasoning
Mar 02, 2026In visually ambiguous manipulation such as detecting button click tactile feedback is often the sole source of ground truth. However, fusing tactile data poses a significant challenge due to a spatiotemporal mismatch: tactile perception requires high-frequency processing with long-horizon memory (System 1), whereas visual policies operate at low control frequencies (System 2). Existing architectures struggle to bridge this gap: Transformers are computationally prohibitive for high-frequency loops (>100Hz), while LSTMs suffer from forgetting over extended interaction histories. In this paper, we introduce TacMamba, a hierarchical architecture that aligns high-bandwidth tactile reflexes with low-frequency visual planning. Our approach comprises three core contributions: (1) a custom high-frequency tactile interface designed for flexible integration; (2) a Mamba-based Tactile History Compressor that encodes continuous force history into a compact state with O(1) inference latency (0.45 ms), enabling plug-and-play fusion with VLA models without joint pre-training and (3) a Tactile-Guided Dual-Stage Training strategy that leverages temporal discrimination for self-supervised representation learning and phase-uniform sampling to mitigate data sparsity. Experiments on discrete counting and implicit state switching demonstrate that TacMamba achieves 100% success rates, significantly outperforming the visual-only pi_0.5 baseline, while strictly satisfying hard real-time constraints.
GigaBrain-0.5M*: a VLA That Learns From World Model-Based Reinforcement Learning
Feb 12, 2026Vision-language-action (VLA) models that directly predict multi-step action chunks from current observations face inherent limitations due to constrained scene understanding and weak future anticipation capabilities. In contrast, video world models pre-trained on web-scale video corpora exhibit robust spatiotemporal reasoning and accurate future prediction, making them a natural foundation for enhancing VLA learning. Therefore, we propose \textit{GigaBrain-0.5M*}, a VLA model trained via world model-based reinforcement learning. Built upon \textit{GigaBrain-0.5}, which is pre-trained on over 10,000 hours of robotic manipulation data, whose intermediate version currently ranks first on the international RoboChallenge benchmark. \textit{GigaBrain-0.5M*} further integrates world model-based reinforcement learning via \textit{RAMP} (Reinforcement leArning via world Model-conditioned Policy) to enable robust cross-task adaptation. Empirical results demonstrate that \textit{RAMP} achieves substantial performance gains over the RECAP baseline, yielding improvements of approximately 30\% on challenging tasks including \texttt{Laundry Folding}, \texttt{Box Packing}, and \texttt{Espresso Preparation}. Critically, \textit{GigaBrain-0.5M$^*$} exhibits reliable long-horizon execution, consistently accomplishing complex manipulation tasks without failure as validated by real-world deployment videos on our \href{https://gigabrain05m.github.io}{project page}.
RealHD: A High-Quality Dataset for Robust Detection of State-of-the-Art AI-Generated Images
Feb 11, 2026The rapid advancement of generative AI has raised concerns about the authenticity of digital images, as highly realistic fake images can now be generated at low cost, potentially increasing societal risks. In response, several datasets have been established to train detection models aimed at distinguishing AI-generated images from real ones. However, existing datasets suffer from limited generalization, low image quality, overly simple prompts, and insufficient image diversity. To address these limitations, we propose a high-quality, large-scale dataset comprising over 730,000 images across multiple categories, including both real and AI-generated images. The generated images are synthesized via state-of-the-art methods, including text-to-image generation (guided by over 10,000 carefully designed prompts), image inpainting, image refinement, and face swapping. Each generated image is annotated with its generation method and category. Inpainting images further include binary masks to indicate inpainted regions, providing rich metadata for analysis. Compared to existing datasets, detection models trained on our dataset demonstrate superior generalization capabilities. Our dataset not only serves as a strong benchmark for evaluating detection methods but also contributes to advancing the robustness of AI-generated image detection techniques. Building upon this, we propose a lightweight detection method based on image noise entropy, which transforms the original image into an entropy tensor of Non-Local Means (NLM) noise before classification. Extensive experiments demonstrate that models trained on our dataset achieve strong generalization, and our method delivers competitive performance, establishing a solid baseline for future research. The dataset and source code are publicly available at https://real-hd.github.io.
* Published in the Proceedings of the 33rd ACM International Conference on Multimedia (ACM MM 2025)
EgoDemoGen: Novel Egocentric Demonstration Generation Enables Viewpoint-Robust Manipulation
Sep 26, 2025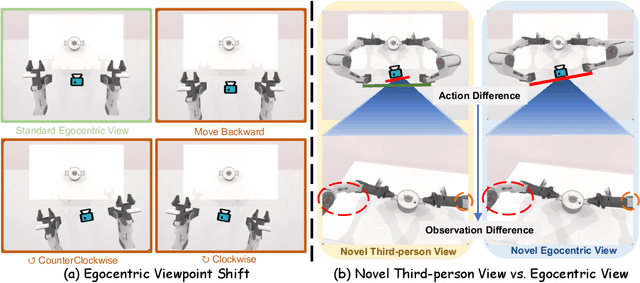

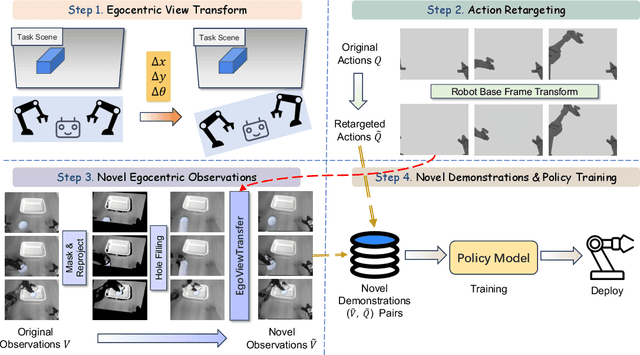
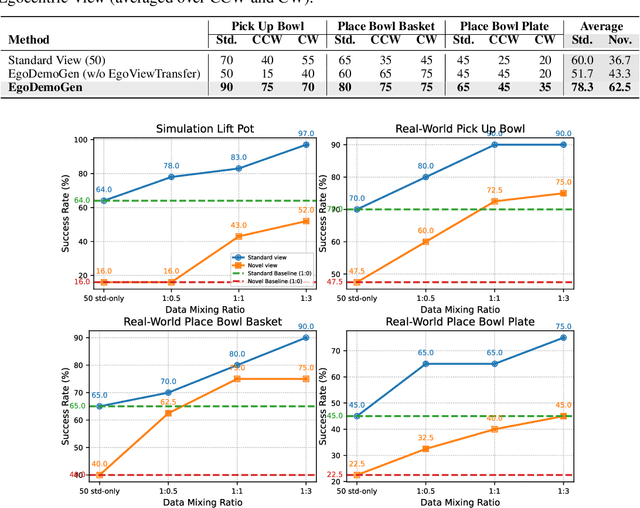
Imitation learning based policies perform well in robotic manipulation, but they often degrade under *egocentric viewpoint shifts* when trained from a single egocentric viewpoint. To address this issue, we present **EgoDemoGen**, a framework that generates *paired* novel egocentric demonstrations by retargeting actions in the novel egocentric frame and synthesizing the corresponding egocentric observation videos with proposed generative video repair model **EgoViewTransfer**, which is conditioned by a novel-viewpoint reprojected scene video and a robot-only video rendered from the retargeted joint actions. EgoViewTransfer is finetuned from a pretrained video generation model using self-supervised double reprojection strategy. We evaluate EgoDemoGen on both simulation (RoboTwin2.0) and real-world robot. After training with a mixture of EgoDemoGen-generated novel egocentric demonstrations and original standard egocentric demonstrations, policy success rate improves **absolutely** by **+17.0%** for standard egocentric viewpoint and by **+17.7%** for novel egocentric viewpoints in simulation. On real-world robot, the **absolute** improvements are **+18.3%** and **+25.8%**. Moreover, performance continues to improve as the proportion of EgoDemoGen-generated demonstrations increases, with diminishing returns. These results demonstrate that EgoDemoGen provides a practical route to egocentric viewpoint-robust robotic manipulation.
EMMA: Generalizing Real-World Robot Manipulation via Generative Visual Transfer
Sep 26, 2025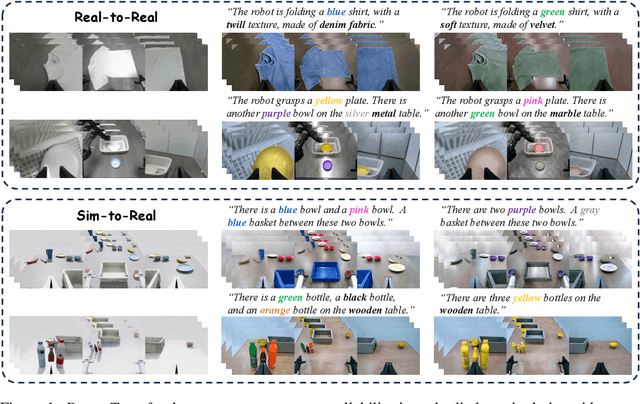
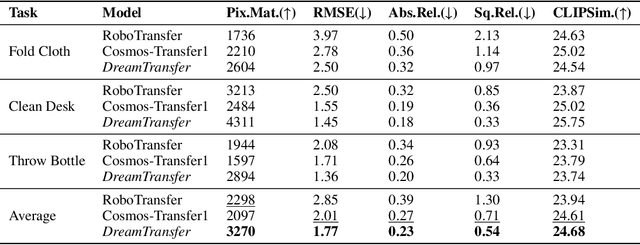
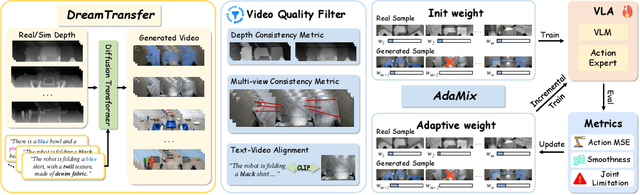
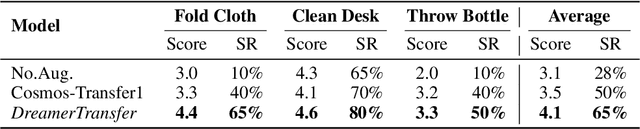
Vision-language-action (VLA) models increasingly rely on diverse training data to achieve robust generalization. However, collecting large-scale real-world robot manipulation data across varied object appearances and environmental conditions remains prohibitively time-consuming and expensive. To overcome this bottleneck, we propose Embodied Manipulation Media Adaptation (EMMA), a VLA policy enhancement framework that integrates a generative data engine with an effective training pipeline. We introduce DreamTransfer, a diffusion Transformer-based framework for generating multi-view consistent, geometrically grounded embodied manipulation videos. DreamTransfer enables text-controlled visual editing of robot videos, transforming foreground, background, and lighting conditions without compromising 3D structure or geometrical plausibility. Furthermore, we explore hybrid training with real and generated data, and introduce AdaMix, a hard-sample-aware training strategy that dynamically reweights training batches to focus optimization on perceptually or kinematically challenging samples. Extensive experiments show that videos generated by DreamTransfer significantly outperform prior video generation methods in multi-view consistency, geometric fidelity, and text-conditioning accuracy. Crucially, VLAs trained with generated data enable robots to generalize to unseen object categories and novel visual domains using only demonstrations from a single appearance. In real-world robotic manipulation tasks with zero-shot visual domains, our approach achieves over a 200% relative performance gain compared to training on real data alone, and further improves by 13% with AdaMix, demonstrating its effectiveness in boosting policy generalization.
MimicDreamer: Aligning Human and Robot Demonstrations for Scalable VLA Training
Sep 26, 2025



Vision Language Action (VLA) models derive their generalization capability from diverse training data, yet collecting embodied robot interaction data remains prohibitively expensive. In contrast, human demonstration videos are far more scalable and cost-efficient to collect, and recent studies confirm their effectiveness in training VLA models. However, a significant domain gap persists between human videos and robot-executed videos, including unstable camera viewpoints, visual discrepancies between human hands and robotic arms, and differences in motion dynamics. To bridge this gap, we propose MimicDreamer, a framework that turns fast, low-cost human demonstrations into robot-usable supervision by jointly aligning vision, viewpoint, and actions to directly support policy training. For visual alignment, we propose H2R Aligner, a video diffusion model that generates high-fidelity robot demonstration videos by transferring motion from human manipulation footage. For viewpoint stabilization, EgoStabilizer is proposed, which canonicalizes egocentric videos via homography and inpaints occlusions and distortions caused by warping. For action alignment, we map human hand trajectories to the robot frame and apply a constrained inverse kinematics solver to produce feasible, low-jitter joint commands with accurate pose tracking. Empirically, VLA models trained purely on our synthesized human-to-robot videos achieve few-shot execution on real robots. Moreover, scaling training with human data significantly boosts performance compared to models trained solely on real robot data; our approach improves the average success rate by 14.7\% across six representative manipulation tasks.
Rethinking Lanes and Points in Complex Scenarios for Monocular 3D Lane Detection
Mar 08, 2025



Monocular 3D lane detection is a fundamental task in autonomous driving. Although sparse-point methods lower computational load and maintain high accuracy in complex lane geometries, current methods fail to fully leverage the geometric structure of lanes in both lane geometry representations and model design. In lane geometry representations, we present a theoretical analysis alongside experimental validation to verify that current sparse lane representation methods contain inherent flaws, resulting in potential errors of up to 20 m, which raise significant safety concerns for driving. To address this issue, we propose a novel patching strategy to completely represent the full lane structure. To enable existing models to match this strategy, we introduce the EndPoint head (EP-head), which adds a patching distance to endpoints. The EP-head enables the model to predict more complete lane representations even with fewer preset points, effectively addressing existing limitations and paving the way for models that are faster and require fewer parameters in the future. In model design, to enhance the model's perception of lane structures, we propose the PointLane attention (PL-attention), which incorporates prior geometric knowledge into the attention mechanism. Extensive experiments demonstrate the effectiveness of the proposed methods on various state-of-the-art models. For instance, in terms of the overall F1-score, our methods improve Persformer by 4.4 points, Anchor3DLane by 3.2 points, and LATR by 2.8 points. The code will be available soon.
GraphAD: Interaction Scene Graph for End-to-end Autonomous Driving
Apr 07, 2024



Modeling complicated interactions among the ego-vehicle, road agents, and map elements has been a crucial part for safety-critical autonomous driving. Previous works on end-to-end autonomous driving rely on the attention mechanism for handling heterogeneous interactions, which fails to capture the geometric priors and is also computationally intensive. In this paper, we propose the Interaction Scene Graph (ISG) as a unified method to model the interactions among the ego-vehicle, road agents, and map elements. With the representation of the ISG, the driving agents aggregate essential information from the most influential elements, including the road agents with potential collisions and the map elements to follow. Since a mass of unnecessary interactions are omitted, the more efficient scene-graph-based framework is able to focus on indispensable connections and leads to better performance. We evaluate the proposed method for end-to-end autonomous driving on the nuScenes dataset. Compared with strong baselines, our method significantly outperforms in the full-stack driving tasks, including perception, prediction, and planning. Code will be released at https://github.com/zhangyp15/GraphAD.