 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEgoDemoGen: Novel Egocentric Demonstration Generation Enables Viewpoint-Robust Manipulation
Paper and Code
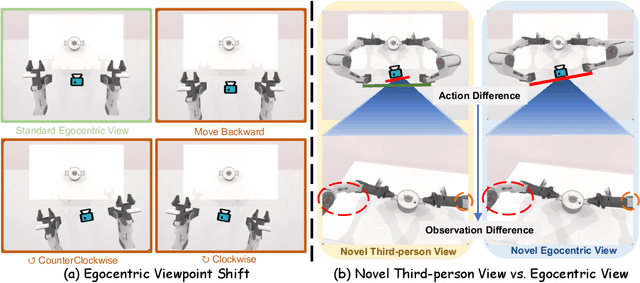

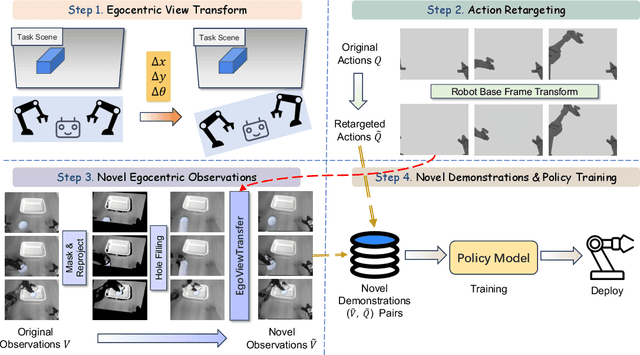
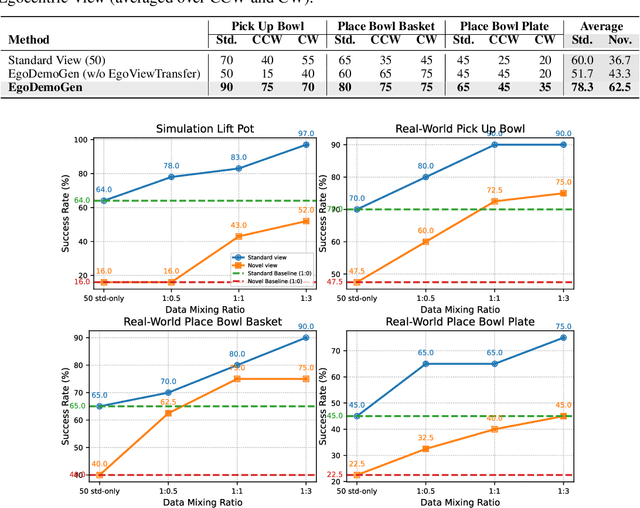
Imitation learning based policies perform well in robotic manipulation, but they often degrade under *egocentric viewpoint shifts* when trained from a single egocentric viewpoint. To address this issue, we present **EgoDemoGen**, a framework that generates *paired* novel egocentric demonstrations by retargeting actions in the novel egocentric frame and synthesizing the corresponding egocentric observation videos with proposed generative video repair model **EgoViewTransfer**, which is conditioned by a novel-viewpoint reprojected scene video and a robot-only video rendered from the retargeted joint actions. EgoViewTransfer is finetuned from a pretrained video generation model using self-supervised double reprojection strategy. We evaluate EgoDemoGen on both simulation (RoboTwin2.0) and real-world robot. After training with a mixture of EgoDemoGen-generated novel egocentric demonstrations and original standard egocentric demonstrations, policy success rate improves **absolutely** by **+17.0%** for standard egocentric viewpoint and by **+17.7%** for novel egocentric viewpoints in simulation. On real-world robot, the **absolute** improvements are **+18.3%** and **+25.8%**. Moreover, performance continues to improve as the proportion of EgoDemoGen-generated demonstrations increases, with diminishing returns. These results demonstrate that EgoDemoGen provides a practical route to egocentric viewpoint-robust robotic manipulation.