 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGoT-R1: Unleashing Reasoning Capability of MLLM for Visual Generation with Reinforcement Learning
May 22, 2025Visual generation models have made remarkable progress in creating realistic images from text prompts, yet struggle with complex prompts that specify multiple objects with precise spatial relationships and attributes. Effective handling of such prompts requires explicit reasoning about the semantic content and spatial layout. We present GoT-R1, a framework that applies reinforcement learning to enhance semantic-spatial reasoning in visual generation. Building upon the Generation Chain-of-Thought approach, GoT-R1 enables models to autonomously discover effective reasoning strategies beyond predefined templates through carefully designed reinforcement learning. To achieve this, we propose a dual-stage multi-dimensional reward framework that leverages MLLMs to evaluate both the reasoning process and final output, enabling effective supervision across the entire generation pipeline. The reward system assesses semantic alignment, spatial accuracy, and visual quality in a unified approach. Experimental results demonstrate significant improvements on T2I-CompBench benchmark, particularly in compositional tasks involving precise spatial relationships and attribute binding. GoT-R1 advances the state-of-the-art in image generation by successfully transferring sophisticated reasoning capabilities to the visual generation domain. To facilitate future research, we make our code and pretrained models publicly available at https://github.com/gogoduan/GoT-R1.
Semiotic Reconstruction of Destination Expectation Constructs An LLM-Driven Computational Paradigm for Social Media Tourism Analytics
May 22, 2025



Social media's rise establishes user-generated content (UGC) as pivotal for travel decisions, yet analytical methods lack scalability. This study introduces a dual-method LLM framework: unsupervised expectation extraction from UGC paired with survey-informed supervised fine-tuning. Findings reveal leisure/social expectations drive engagement more than foundational natural/emotional factors. By establishing LLMs as precision tools for expectation quantification, we advance tourism analytics methodology and propose targeted strategies for experience personalization and social travel promotion. The framework's adaptability extends to consumer behavior research, demonstrating computational social science's transformative potential in marketing optimization.
UniErase: Unlearning Token as a Universal Erasure Primitive for Language Models
May 21, 2025Large language models require iterative updates to address challenges such as knowledge conflicts and outdated information (e.g., incorrect, private, or illegal contents). Machine unlearning provides a systematic methodology for targeted knowledge removal from trained models, enabling elimination of sensitive information influences. However, mainstream fine-tuning-based unlearning methods often fail to balance unlearning efficacy and model ability, frequently resulting in catastrophic model collapse under extensive knowledge removal. Meanwhile, in-context unlearning, which relies solely on contextual prompting without modifying the model's intrinsic mechanisms, suffers from limited generalizability and struggles to achieve true unlearning. In this work, we introduce UniErase, a novel unlearning paradigm that employs learnable parametric suffix (unlearning token) to steer language models toward targeted forgetting behaviors. UniErase operates through two key phases: (I) an optimization stage that binds desired unlearning outputs to the model's autoregressive probability distribution via token optimization, followed by (II) a lightweight model editing phase that activates the learned token to probabilistically induce specified forgetting objective. Serving as a new research direction for token learning to induce unlearning target, UniErase achieves state-of-the-art (SOTA) performance across batch, sequential, and precise unlearning under fictitious and real-world knowledge settings. Remarkably, in terms of TOFU benchmark, UniErase, modifying only around 3.66% of the LLM parameters, outperforms previous forgetting SOTA baseline by around 4.01 times for model ability with even better unlearning efficacy. Similarly, UniErase, maintaining more ability, also surpasses previous retaining SOTA by 35.96% for unlearning efficacy, showing dual top-tier performances in current unlearing domain.
Pierce the Mists, Greet the Sky: Decipher Knowledge Overshadowing via Knowledge Circuit Analysis
May 21, 2025Large Language Models (LLMs), despite their remarkable capabilities, are hampered by hallucinations. A particularly challenging variant, knowledge overshadowing, occurs when one piece of activated knowledge inadvertently masks another relevant piece, leading to erroneous outputs even with high-quality training data. Current understanding of overshadowing is largely confined to inference-time observations, lacking deep insights into its origins and internal mechanisms during model training. Therefore, we introduce PhantomCircuit, a novel framework designed to comprehensively analyze and detect knowledge overshadowing. By innovatively employing knowledge circuit analysis, PhantomCircuit dissects the internal workings of attention heads, tracing how competing knowledge pathways contribute to the overshadowing phenomenon and its evolution throughout the training process. Extensive experiments demonstrate PhantomCircuit's effectiveness in identifying such instances, offering novel insights into this elusive hallucination and providing the research community with a new methodological lens for its potential mitigation.
DD-Ranking: Rethinking the Evaluation of Dataset Distillation
May 19, 2025
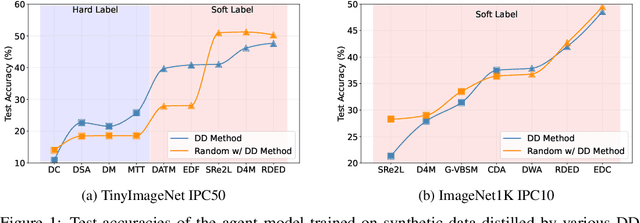
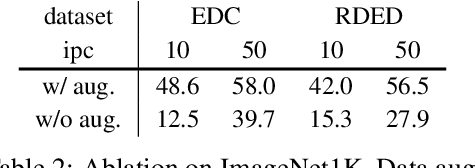
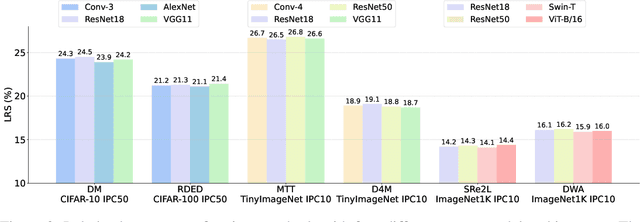
In recent years, dataset distillation has provided a reliable solution for data compression, where models trained on the resulting smaller synthetic datasets achieve performance comparable to those trained on the original datasets. To further improve the performance of synthetic datasets, various training pipelines and optimization objectives have been proposed, greatly advancing the field of dataset distillation. Recent decoupled dataset distillation methods introduce soft labels and stronger data augmentation during the post-evaluation phase and scale dataset distillation up to larger datasets (e.g., ImageNet-1K). However, this raises a question: Is accuracy still a reliable metric to fairly evaluate dataset distillation methods? Our empirical findings suggest that the performance improvements of these methods often stem from additional techniques rather than the inherent quality of the images themselves, with even randomly sampled images achieving superior results. Such misaligned evaluation settings severely hinder the development of DD. Therefore, we propose DD-Ranking, a unified evaluation framework, along with new general evaluation metrics to uncover the true performance improvements achieved by different methods. By refocusing on the actual information enhancement of distilled datasets, DD-Ranking provides a more comprehensive and fair evaluation standard for future research advancements.
A Survey on the Safety and Security Threats of Computer-Using Agents: JARVIS or Ultron?
May 16, 2025Recently, AI-driven interactions with computing devices have advanced from basic prototype tools to sophisticated, LLM-based systems that emulate human-like operations in graphical user interfaces. We are now witnessing the emergence of \emph{Computer-Using Agents} (CUAs), capable of autonomously performing tasks such as navigating desktop applications, web pages, and mobile apps. However, as these agents grow in capability, they also introduce novel safety and security risks. Vulnerabilities in LLM-driven reasoning, with the added complexity of integrating multiple software components and multimodal inputs, further complicate the security landscape. In this paper, we present a systematization of knowledge on the safety and security threats of CUAs. We conduct a comprehensive literature review and distill our findings along four research objectives: \textit{\textbf{(i)}} define the CUA that suits safety analysis; \textit{\textbf{(ii)} } categorize current safety threats among CUAs; \textit{\textbf{(iii)}} propose a comprehensive taxonomy of existing defensive strategies; \textit{\textbf{(iv)}} summarize prevailing benchmarks, datasets, and evaluation metrics used to assess the safety and performance of CUAs. Building on these insights, our work provides future researchers with a structured foundation for exploring unexplored vulnerabilities and offers practitioners actionable guidance in designing and deploying secure Computer-Using Agents.
GuardReasoner-VL: Safeguarding VLMs via Reinforced Reasoning
May 16, 2025To enhance the safety of VLMs, this paper introduces a novel reasoning-based VLM guard model dubbed GuardReasoner-VL. The core idea is to incentivize the guard model to deliberatively reason before making moderation decisions via online RL. First, we construct GuardReasoner-VLTrain, a reasoning corpus with 123K samples and 631K reasoning steps, spanning text, image, and text-image inputs. Then, based on it, we cold-start our model's reasoning ability via SFT. In addition, we further enhance reasoning regarding moderation through online RL. Concretely, to enhance diversity and difficulty of samples, we conduct rejection sampling followed by data augmentation via the proposed safety-aware data concatenation. Besides, we use a dynamic clipping parameter to encourage exploration in early stages and exploitation in later stages. To balance performance and token efficiency, we design a length-aware safety reward that integrates accuracy, format, and token cost. Extensive experiments demonstrate the superiority of our model. Remarkably, it surpasses the runner-up by 19.27% F1 score on average. We release data, code, and models (3B/7B) of GuardReasoner-VL at https://github.com/yueliu1999/GuardReasoner-VL/
CellVerse: Do Large Language Models Really Understand Cell Biology?
May 09, 2025



Recent studies have demonstrated the feasibility of modeling single-cell data as natural languages and the potential of leveraging powerful large language models (LLMs) for understanding cell biology. However, a comprehensive evaluation of LLMs' performance on language-driven single-cell analysis tasks still remains unexplored. Motivated by this challenge, we introduce CellVerse, a unified language-centric question-answering benchmark that integrates four types of single-cell multi-omics data and encompasses three hierarchical levels of single-cell analysis tasks: cell type annotation (cell-level), drug response prediction (drug-level), and perturbation analysis (gene-level). Going beyond this, we systematically evaluate the performance across 14 open-source and closed-source LLMs ranging from 160M to 671B on CellVerse. Remarkably, the experimental results reveal: (1) Existing specialist models (C2S-Pythia) fail to make reasonable decisions across all sub-tasks within CellVerse, while generalist models such as Qwen, Llama, GPT, and DeepSeek family models exhibit preliminary understanding capabilities within the realm of cell biology. (2) The performance of current LLMs falls short of expectations and has substantial room for improvement. Notably, in the widely studied drug response prediction task, none of the evaluated LLMs demonstrate significant performance improvement over random guessing. CellVerse offers the first large-scale empirical demonstration that significant challenges still remain in applying LLMs to cell biology. By introducing CellVerse, we lay the foundation for advancing cell biology through natural languages and hope this paradigm could facilitate next-generation single-cell analysis.
A Vision for Auto Research with LLM Agents
Apr 26, 2025This paper introduces Agent-Based Auto Research, a structured multi-agent framework designed to automate, coordinate, and optimize the full lifecycle of scientific research. Leveraging the capabilities of large language models (LLMs) and modular agent collaboration, the system spans all major research phases, including literature review, ideation, methodology planning, experimentation, paper writing, peer review response, and dissemination. By addressing issues such as fragmented workflows, uneven methodological expertise, and cognitive overload, the framework offers a systematic and scalable approach to scientific inquiry. Preliminary explorations demonstrate the feasibility and potential of Auto Research as a promising paradigm for self-improving, AI-driven research processes.
A Comprehensive Survey in LLM(-Agent) Full Stack Safety: Data, Training and Deployment
Apr 22, 2025The remarkable success of Large Language Models (LLMs) has illuminated a promising pathway toward achieving Artificial General Intelligence for both academic and industrial communities, owing to their unprecedented performance across various applications. As LLMs continue to gain prominence in both research and commercial domains, their security and safety implications have become a growing concern, not only for researchers and corporations but also for every nation. Currently, existing surveys on LLM safety primarily focus on specific stages of the LLM lifecycle, e.g., deployment phase or fine-tuning phase, lacking a comprehensive understanding of the entire "lifechain" of LLMs. To address this gap, this paper introduces, for the first time, the concept of "full-stack" safety to systematically consider safety issues throughout the entire process of LLM training, deployment, and eventual commercialization. Compared to the off-the-shelf LLM safety surveys, our work demonstrates several distinctive advantages: (I) Comprehensive Perspective. We define the complete LLM lifecycle as encompassing data preparation, pre-training, post-training, deployment and final commercialization. To our knowledge, this represents the first safety survey to encompass the entire lifecycle of LLMs. (II) Extensive Literature Support. Our research is grounded in an exhaustive review of over 800+ papers, ensuring comprehensive coverage and systematic organization of security issues within a more holistic understanding. (III) Unique Insights. Through systematic literature analysis, we have developed reliable roadmaps and perspectives for each chapter. Our work identifies promising research directions, including safety in data generation, alignment techniques, model editing, and LLM-based agent systems. These insights provide valuable guidance for researchers pursuing future work in this field.