 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStereoCarla: A High-Fidelity Driving Dataset for Generalizable Stereo
Sep 16, 2025Stereo matching plays a crucial role in enabling depth perception for autonomous driving and robotics. While recent years have witnessed remarkable progress in stereo matching algorithms, largely driven by learning-based methods and synthetic datasets, the generalization performance of these models remains constrained by the limited diversity of existing training data. To address these challenges, we present StereoCarla, a high-fidelity synthetic stereo dataset specifically designed for autonomous driving scenarios. Built on the CARLA simulator, StereoCarla incorporates a wide range of camera configurations, including diverse baselines, viewpoints, and sensor placements as well as varied environmental conditions such as lighting changes, weather effects, and road geometries. We conduct comprehensive cross-domain experiments across four standard evaluation datasets (KITTI2012, KITTI2015, Middlebury, ETH3D) and demonstrate that models trained on StereoCarla outperform those trained on 11 existing stereo datasets in terms of generalization accuracy across multiple benchmarks. Furthermore, when integrated into multi-dataset training, StereoCarla contributes substantial improvements to generalization accuracy, highlighting its compatibility and scalability. This dataset provides a valuable benchmark for developing and evaluating stereo algorithms under realistic, diverse, and controllable settings, facilitating more robust depth perception systems for autonomous vehicles. Code can be available at https://github.com/XiandaGuo/OpenStereo, and data can be available at https://xiandaguo.net/StereoCarla.
RoboChemist: Long-Horizon and Safety-Compliant Robotic Chemical Experimentation
Sep 10, 2025



Robotic chemists promise to both liberate human experts from repetitive tasks and accelerate scientific discovery, yet remain in their infancy. Chemical experiments involve long-horizon procedures over hazardous and deformable substances, where success requires not only task completion but also strict compliance with experimental norms. To address these challenges, we propose \textit{RoboChemist}, a dual-loop framework that integrates Vision-Language Models (VLMs) with Vision-Language-Action (VLA) models. Unlike prior VLM-based systems (e.g., VoxPoser, ReKep) that rely on depth perception and struggle with transparent labware, and existing VLA systems (e.g., RDT, pi0) that lack semantic-level feedback for complex tasks, our method leverages a VLM to serve as (1) a planner to decompose tasks into primitive actions, (2) a visual prompt generator to guide VLA models, and (3) a monitor to assess task success and regulatory compliance. Notably, we introduce a VLA interface that accepts image-based visual targets from the VLM, enabling precise, goal-conditioned control. Our system successfully executes both primitive actions and complete multi-step chemistry protocols. Results show 23.57% higher average success rate and a 0.298 average increase in compliance rate over state-of-the-art VLA baselines, while also demonstrating strong generalization to objects and tasks.
TA-VLA: Elucidating the Design Space of Torque-aware Vision-Language-Action Models
Sep 09, 2025Many robotic manipulation tasks require sensing and responding to force signals such as torque to assess whether the task has been successfully completed and to enable closed-loop control. However, current Vision-Language-Action (VLA) models lack the ability to integrate such subtle physical feedback. In this work, we explore Torque-aware VLA models, aiming to bridge this gap by systematically studying the design space for incorporating torque signals into existing VLA architectures. We identify and evaluate several strategies, leading to three key findings. First, introducing torque adapters into the decoder consistently outperforms inserting them into the encoder.Third, inspired by joint prediction and planning paradigms in autonomous driving, we propose predicting torque as an auxiliary output, which further improves performance. This strategy encourages the model to build a physically grounded internal representation of interaction dynamics. Extensive quantitative and qualitative experiments across contact-rich manipulation benchmarks validate our findings.
One View, Many Worlds: Single-Image to 3D Object Meets Generative Domain Randomization for One-Shot 6D Pose Estimation
Sep 09, 2025



Estimating the 6D pose of arbitrary unseen objects from a single reference image is critical for robotics operating in the long-tail of real-world instances. However, this setting is notoriously challenging: 3D models are rarely available, single-view reconstructions lack metric scale, and domain gaps between generated models and real-world images undermine robustness. We propose OnePoseViaGen, a pipeline that tackles these challenges through two key components. First, a coarse-to-fine alignment module jointly refines scale and pose by combining multi-view feature matching with render-and-compare refinement. Second, a text-guided generative domain randomization strategy diversifies textures, enabling effective fine-tuning of pose estimators with synthetic data. Together, these steps allow high-fidelity single-view 3D generation to support reliable one-shot 6D pose estimation. On challenging benchmarks (YCBInEOAT, Toyota-Light, LM-O), OnePoseViaGen achieves state-of-the-art performance far surpassing prior approaches. We further demonstrate robust dexterous grasping with a real robot hand, validating the practicality of our method in real-world manipulation. Project page: https://gzwsama.github.io/OnePoseviaGen.github.io/
GaussianArt: Unified Modeling of Geometry and Motion for Articulated Objects
Aug 20, 2025Reconstructing articulated objects is essential for building digital twins of interactive environments. However, prior methods typically decouple geometry and motion by first reconstructing object shape in distinct states and then estimating articulation through post-hoc alignment. This separation complicates the reconstruction pipeline and restricts scalability, especially for objects with complex, multi-part articulation. We introduce a unified representation that jointly models geometry and motion using articulated 3D Gaussians. This formulation improves robustness in motion decomposition and supports articulated objects with up to 20 parts, significantly outperforming prior approaches that often struggle beyond 2--3 parts due to brittle initialization. To systematically assess scalability and generalization, we propose MPArt-90, a new benchmark consisting of 90 articulated objects across 20 categories, each with diverse part counts and motion configurations. Extensive experiments show that our method consistently achieves superior accuracy in part-level geometry reconstruction and motion estimation across a broad range of object types. We further demonstrate applicability to downstream tasks such as robotic simulation and human-scene interaction modeling, highlighting the potential of unified articulated representations in scalable physical modeling.
Reusing Attention for One-stage Lane Topology Understanding
Jul 23, 2025Understanding lane toplogy relationships accurately is critical for safe autonomous driving. However, existing two-stage methods suffer from inefficiencies due to error propagations and increased computational overheads. To address these challenges, we propose a one-stage architecture that simultaneously predicts traffic elements, lane centerlines and topology relationship, improving both the accuracy and inference speed of lane topology understanding for autonomous driving. Our key innovation lies in reusing intermediate attention resources within distinct transformer decoders. This approach effectively leverages the inherent relational knowledge within the element detection module to enable the modeling of topology relationships among traffic elements and lanes without requiring additional computationally expensive graph networks. Furthermore, we are the first to demonstrate that knowledge can be distilled from models that utilize standard definition (SD) maps to those operates without using SD maps, enabling superior performance even in the absence of SD maps. Extensive experiments on the OpenLane-V2 dataset show that our approach outperforms baseline methods in both accuracy and efficiency, achieving superior results in lane detection, traffic element identification, and topology reasoning. Our code is available at https://github.com/Yang-Li-2000/one-stage.git.
InvRGB+L: Inverse Rendering of Complex Scenes with Unified Color and LiDAR Reflectance Modeling
Jul 23, 2025



We present InvRGB+L, a novel inverse rendering model that reconstructs large, relightable, and dynamic scenes from a single RGB+LiDAR sequence. Conventional inverse graphics methods rely primarily on RGB observations and use LiDAR mainly for geometric information, often resulting in suboptimal material estimates due to visible light interference. We find that LiDAR's intensity values-captured with active illumination in a different spectral range-offer complementary cues for robust material estimation under variable lighting. Inspired by this, InvRGB+L leverages LiDAR intensity cues to overcome challenges inherent in RGB-centric inverse graphics through two key innovations: (1) a novel physics-based LiDAR shading model and (2) RGB-LiDAR material consistency losses. The model produces novel-view RGB and LiDAR renderings of urban and indoor scenes and supports relighting, night simulations, and dynamic object insertions, achieving results that surpass current state-of-the-art methods in both scene-level urban inverse rendering and LiDAR simulation.
Morpheus: A Neural-driven Animatronic Face with Hybrid Actuation and Diverse Emotion Control
Jul 22, 2025Previous animatronic faces struggle to express emotions effectively due to hardware and software limitations. On the hardware side, earlier approaches either use rigid-driven mechanisms, which provide precise control but are difficult to design within constrained spaces, or tendon-driven mechanisms, which are more space-efficient but challenging to control. In contrast, we propose a hybrid actuation approach that combines the best of both worlds. The eyes and mouth-key areas for emotional expression-are controlled using rigid mechanisms for precise movement, while the nose and cheek, which convey subtle facial microexpressions, are driven by strings. This design allows us to build a compact yet versatile hardware platform capable of expressing a wide range of emotions. On the algorithmic side, our method introduces a self-modeling network that maps motor actions to facial landmarks, allowing us to automatically establish the relationship between blendshape coefficients for different facial expressions and the corresponding motor control signals through gradient backpropagation. We then train a neural network to map speech input to corresponding blendshape controls. With our method, we can generate distinct emotional expressions such as happiness, fear, disgust, and anger, from any given sentence, each with nuanced, emotion-specific control signals-a feature that has not been demonstrated in earlier systems. We release the hardware design and code at https://github.com/ZZongzheng0918/Morpheus-Hardware and https://github.com/ZZongzheng0918/Morpheus-Software.
Light of Normals: Unified Feature Representation for Universal Photometric Stereo
Jun 24, 2025



Universal photometric stereo (PS) aims to recover high-quality surface normals from objects under arbitrary lighting conditions without relying on specific illumination models. Despite recent advances such as SDM-UniPS and Uni MS-PS, two fundamental challenges persist: 1) the deep coupling between varying illumination and surface normal features, where ambiguity in observed intensity makes it difficult to determine whether brightness variations stem from lighting changes or surface orientation; and 2) the preservation of high-frequency geometric details in complex surfaces, where intricate geometries create self-shadowing, inter-reflections, and subtle normal variations that conventional feature processing operations struggle to capture accurately.
SyncTalk++: High-Fidelity and Efficient Synchronized Talking Heads Synthesis Using Gaussian Splatting
Jun 17, 2025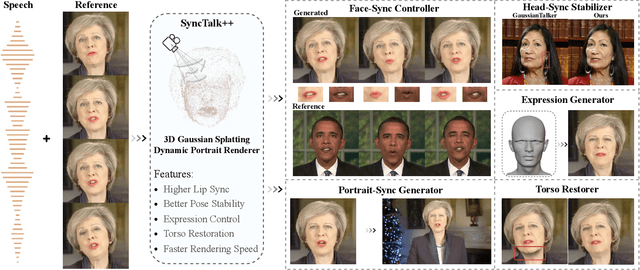
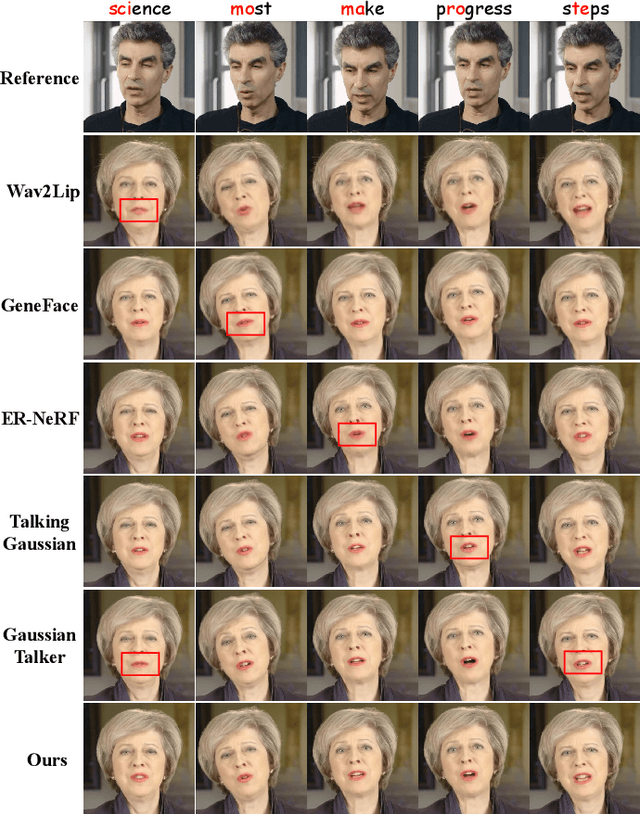
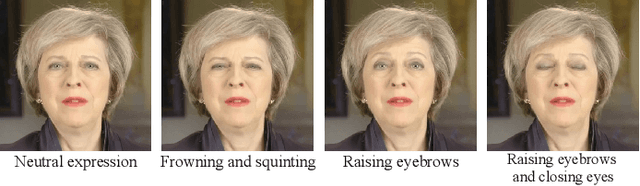
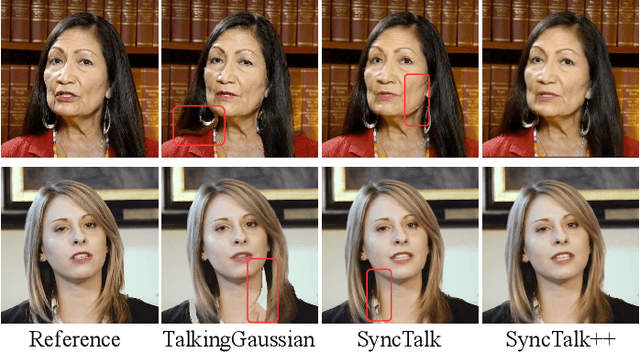
Achieving high synchronization in the synthesis of realistic, speech-driven talking head videos presents a significant challenge. A lifelike talking head requires synchronized coordination of subject identity, lip movements, facial expressions, and head poses. The absence of these synchronizations is a fundamental flaw, leading to unrealistic results. To address the critical issue of synchronization, identified as the ''devil'' in creating realistic talking heads, we introduce SyncTalk++, which features a Dynamic Portrait Renderer with Gaussian Splatting to ensure consistent subject identity preservation and a Face-Sync Controller that aligns lip movements with speech while innovatively using a 3D facial blendshape model to reconstruct accurate facial expressions. To ensure natural head movements, we propose a Head-Sync Stabilizer, which optimizes head poses for greater stability. Additionally, SyncTalk++ enhances robustness to out-of-distribution (OOD) audio by incorporating an Expression Generator and a Torso Restorer, which generate speech-matched facial expressions and seamless torso regions. Our approach maintains consistency and continuity in visual details across frames and significantly improves rendering speed and quality, achieving up to 101 frames per second. Extensive experiments and user studies demonstrate that SyncTalk++ outperforms state-of-the-art methods in synchronization and realism. We recommend watching the supplementary video: https://ziqiaopeng.github.io/synctalk++.