 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrated Sensing, Communication and Control enabled Agile UAV Swarm
Jan 21, 2026Uncrewed aerial vehicle (UAV) swarms are pivotal in the applications such as disaster relief, aerial base station (BS) and logistics transportation. These scenarios require the capabilities in accurate sensing, efficient communication and flexible control for real-time and reliable task execution. However, sensing, communication and control are studied independently in traditional research, which limits the overall performance of UAV swarms. To overcome this disadvantage, we propose a deeply coupled scheme of integrated sensing, communication and control (ISCC) for UAV swarms, which is a systemic paradigm that transcends traditional isolated designs of sensing, communication and control by establishing a tightly-coupled closed-loop through the co-optimization of sensing, communication and control. In this article, we firstly analyze the requirements of scenarios and key performance metrics. Subsequently, the enabling technologies are proposed, including communication-and-control-enhanced sensing, sensing-and-control-enhanced communication, and sensing-and-communication-enhanced control. Simulation results validate the performance of the proposed ISCC framework, demonstrating its application potential in the future.
RefProtoFL: Communication-Efficient Federated Learning via External-Referenced Prototype Alignment
Jan 21, 2026Federated learning (FL) enables collaborative model training without sharing raw data in edge environments, but is constrained by limited communication bandwidth and heterogeneous client data distributions. Prototype-based FL mitigates this issue by exchanging class-wise feature prototypes instead of full model parameters; however, existing methods still suffer from suboptimal generalization under severe communication constraints. In this paper, we propose RefProtoFL, a communication-efficient FL framework that integrates External-Referenced Prototype Alignment (ERPA) for representation consistency with Adaptive Probabilistic Update Dropping (APUD) for communication efficiency. Specifically, we decompose the model into a private backbone and a lightweight shared adapter, and restrict federated communication to the adapter parameters only. To further reduce uplink cost, APUD performs magnitude-aware Top-K sparsification, transmitting only the most significant adapter updates for server-side aggregation. To address representation inconsistency across heterogeneous clients, ERPA leverages a small server-held public dataset to construct external reference prototypes that serve as shared semantic anchors. For classes covered by public data, clients directly align local representations to public-induced prototypes, whereas for uncovered classes, alignment relies on server-aggregated global reference prototypes via weighted averaging. Extensive experiments on standard benchmarks demonstrate that RefProtoFL attains higher classification accuracy than state-of-the-art prototype-based FL baselines.
Beyond Target-Level: ISAC-Enabled Event-Level Sensing for Behavioral Intention Prediction
Jan 17, 2026Integrated Sensing and Communication (ISAC) holds great promise for enabling event-level sensing, such as behavioral intention prediction (BIP) in autonomous driving, particularly under non-line-of-sight (NLoS) or adverse weather conditions where conventional sensors degrade. However, as a key instance of event-level sensing, ISAC-based BIP remains unexplored. To address this gap, we propose an ISAC-enabled BIP framework and validate its feasibility and effectiveness through extensive simulations. Our framework achieves robust performance in safety-critical scenarios, improving the F1-score by 11.4% over sensor-based baselines in adverse weather, thereby demonstrating ISAC's potential for intelligent event-level sensing.
Near-field Target Localization: Effect of Hardware Impairments
Dec 25, 2025



The prior works on near-field target localization have mostly assumed ideal hardware models and thus suffer from two limitations in practice. First, extremely large-scale arrays (XL-arrays) usually face a variety of hardware impairments (HIs) that may introduce unknown phase and/or amplitude errors. Second, the existing block coordinate descent (BCD)-based methods for joint estimation of the HI indicator, channel gain, angle, and range may induce considerable target localization error when the target is very close to the XL-array. To address these issues, we propose in this paper a new three-phase HI-aware near-field localization method, by efficiently detecting faulty antennas and estimating the positions of targets. Specifically, we first determine faulty antennas by using compressed sensing (CS) methods and improve detection accuracy based on coarse target localization. Then, a dedicated phase calibration method is designed to correct phase errors induced by detected faulty antennas. Subsequently, an efficient near-field localization method is devised to accurately estimate the positions of targets based on the full XL-array with phase calibration. Additionally, we resort to the misspecified Cramer-Rao bound (MCRB) to quantify the performance loss caused by HIs. Last, numerical results demonstrate that our proposed method significantly reduces the localization errors as compared to various benchmark schemes, especially for the case with a short target range and/or a high fault probability.
Integrated Sensing and Communication: Towards Multifunctional Perceptive Network
Oct 16, 2025The capacity-maximization design philosophy has driven the growth of wireless networks for decades. However, with the slowdown in recent data traffic demand, the mobile industry can no longer rely solely on communication services to sustain development. In response, Integrated Sensing and Communications (ISAC) has emerged as a transformative solution, embedding sensing capabilities into communication networks to enable multifunctional wireless systems. This paradigm shift expands the role of networks from sole data transmission to versatile platforms supporting diverse applications. In this review, we provide a bird's-eye view of ISAC for new researchers, highlighting key challenges, opportunities, and application scenarios to guide future exploration in this field.
One Prompt Fits All: Universal Graph Adaptation for Pretrained Models
Sep 26, 2025Graph Prompt Learning (GPL) has emerged as a promising paradigm that bridges graph pretraining models and downstream scenarios, mitigating label dependency and the misalignment between upstream pretraining and downstream tasks. Although existing GPL studies explore various prompt strategies, their effectiveness and underlying principles remain unclear. We identify two critical limitations: (1) Lack of consensus on underlying mechanisms: Despite current GPLs have advanced the field, there is no consensus on how prompts interact with pretrained models, as different strategies intervene at varying spaces within the model, i.e., input-level, layer-wise, and representation-level prompts. (2) Limited scenario adaptability: Most methods fail to generalize across diverse downstream scenarios, especially under data distribution shifts (e.g., homophilic-to-heterophilic graphs). To address these issues, we theoretically analyze existing GPL approaches and reveal that representation-level prompts essentially function as fine-tuning a simple downstream classifier, proposing that graph prompt learning should focus on unleashing the capability of pretrained models, and the classifier adapts to downstream scenarios. Based on our findings, we propose UniPrompt, a novel GPL method that adapts any pretrained models, unleashing the capability of pretrained models while preserving the structure of the input graph. Extensive experiments demonstrate that our method can effectively integrate with various pretrained models and achieve strong performance across in-domain and cross-domain scenarios.
MARS2 2025 Challenge on Multimodal Reasoning: Datasets, Methods, Results, Discussion, and Outlook
Sep 17, 2025
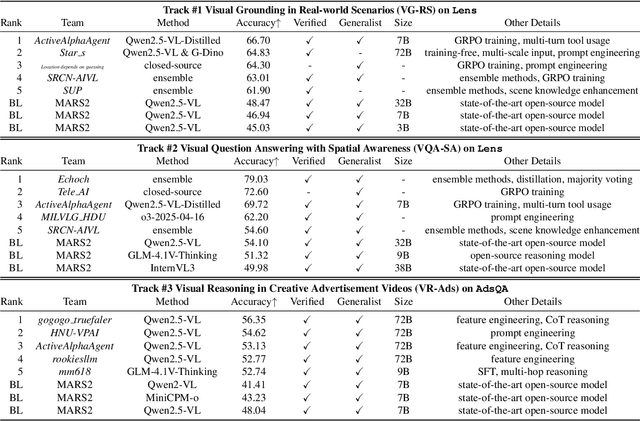

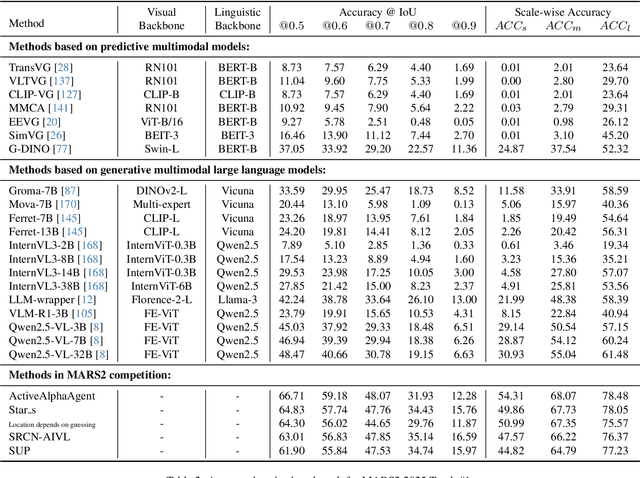
This paper reviews the MARS2 2025 Challenge on Multimodal Reasoning. We aim to bring together different approaches in multimodal machine learning and LLMs via a large benchmark. We hope it better allows researchers to follow the state-of-the-art in this very dynamic area. Meanwhile, a growing number of testbeds have boosted the evolution of general-purpose large language models. Thus, this year's MARS2 focuses on real-world and specialized scenarios to broaden the multimodal reasoning applications of MLLMs. Our organizing team released two tailored datasets Lens and AdsQA as test sets, which support general reasoning in 12 daily scenarios and domain-specific reasoning in advertisement videos, respectively. We evaluated 40+ baselines that include both generalist MLLMs and task-specific models, and opened up three competition tracks, i.e., Visual Grounding in Real-world Scenarios (VG-RS), Visual Question Answering with Spatial Awareness (VQA-SA), and Visual Reasoning in Creative Advertisement Videos (VR-Ads). Finally, 76 teams from the renowned academic and industrial institutions have registered and 40+ valid submissions (out of 1200+) have been included in our ranking lists. Our datasets, code sets (40+ baselines and 15+ participants' methods), and rankings are publicly available on the MARS2 workshop website and our GitHub organization page https://github.com/mars2workshop/, where our updates and announcements of upcoming events will be continuously provided.
CSRD2025: A Large-Scale Synthetic Radio Dataset for Spectrum Sensing in Wireless Communications
Aug 27, 2025The development of Large AI Models (LAMs) for wireless communications, particularly for complex tasks like spectrum sensing, is critically dependent on the availability of vast, diverse, and realistic datasets. Addressing this need, this paper introduces the ChangShuoRadioData (CSRD) framework, an open-source, modular simulation platform designed for generating large-scale synthetic radio frequency (RF) data. CSRD simulates the end-to-end transmission and reception process, incorporating an extensive range of modulation schemes (100 types, including analog, digital, OFDM, and OTFS), configurable channel models featuring both statistical fading and site-specific ray tracing using OpenStreetMap data, and detailed modeling of realistic RF front-end impairments for various antenna configurations (SISO/MISO/MIMO). Using this framework, we characterize CSRD2025, a substantial dataset benchmark comprising over 25,000,000 frames (approx. 200TB), which is approximately 10,000 times larger than the widely used RML2018 dataset. CSRD2025 offers unprecedented signal diversity and complexity, specifically engineered to bridge the Sim2Real gap. Furthermore, we provide processing pipelines to convert IQ data into spectrograms annotated in COCO format, facilitating object detection approaches for time-frequency signal analysis. The dataset specification includes standardized 8:1:1 training, validation, and test splits (via frame indices) to ensure reproducible research. The CSRD framework is released at https://github.com/Singingkettle/ChangShuoRadioData to accelerate the advancement of AI-driven spectrum sensing and management.
Coherent Compensation-Based Sensing for Long-Range Targets in Integrated Sensing and Communication System
Aug 17, 2025Integrated sensing and communication (ISAC) is a promising candidate technology for 6G due to its improvement in spectral efficiency and energy efficiency. Orthogonal frequency division multiplexing (OFDM) signal is a mainstream candidate ISAC waveform. However, there are inter-symbol interference (ISI) and inter-carrier interference (ICI) when the round-trip delay exceeds the cyclic prefix (CP) duration for OFDM signals, which limits the maximum sensing range of ISAC system. When detecting a long-range target, the wide beam inevitably covers the close-range target, of which the echo's power is much larger than that of the long-range target. In order to tackle the above problem, a multiple signal classification (MUSIC) and least squares (LS)-based spatial signal separation method is proposed to separate the echo signals reflected from different targets. Moreover, a coherent compensation-based sensing signal processing method at the receiver is proposed to enhance the signal to interference plus noise power ratio (SINR) of the OFDM block for generating the range-Doppler map (RDM) with higher SINR. Simulation results reveal that the proposed method greatly enhances the SINR of RDM by 10 dB for a target at 500 m compared with two-dimensional fast Fourier transform (2D-FFT) method. Besides, the detection probability is also significantly improved compared to the benchmarking method.
* 15 pages, 10 figures
Subspace Fitting Approach for Wideband Near-Field Localization
Aug 06, 2025Two subspace fitting approaches are proposed for wideband near-field localization. Unlike in conventional far-field systems, where distance and angle can be estimated separately, spherical wave propagation in near-field systems couples these parameters. We therefore derive a frequency-domain near-field signal model for multi-target wideband systems and develop a subspace fitting-based MUSIC method that jointly estimates distance and angle. To reduce complexity, a Fresnel approximation MUSIC algorithm is further introduced to decouple the distance and angle parameters. Numerical results verify the effectiveness of both proposed approaches.