 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTopoSizing: An LLM-aided Framework of Topology-based Understanding and Sizing for AMS Circuits
Sep 17, 2025



Analog and mixed-signal circuit design remains challenging due to the shortage of high-quality data and the difficulty of embedding domain knowledge into automated flows. Traditional black-box optimization achieves sampling efficiency but lacks circuit understanding, which often causes evaluations to be wasted in low-value regions of the design space. In contrast, learning-based methods embed structural knowledge but are case-specific and costly to retrain. Recent attempts with large language models show potential, yet they often rely on manual intervention, limiting generality and transparency. We propose TopoSizing, an end-to-end framework that performs robust circuit understanding directly from raw netlists and translates this knowledge into optimization gains. Our approach first applies graph algorithms to organize circuits into a hierarchical device-module-stage representation. LLM agents then execute an iterative hypothesis-verification-refinement loop with built-in consistency checks, producing explicit annotations. Verified insights are integrated into Bayesian optimization through LLM-guided initial sampling and stagnation-triggered trust-region updates, improving efficiency while preserving feasibility.
Easier Painting Than Thinking: Can Text-to-Image Models Set the Stage, but Not Direct the Play?
Sep 03, 2025Text-to-image (T2I) generation aims to synthesize images from textual prompts, which jointly specify what must be shown and imply what can be inferred, thereby corresponding to two core capabilities: composition and reasoning. However, with the emerging advances of T2I models in reasoning beyond composition, existing benchmarks reveal clear limitations in providing comprehensive evaluations across and within these capabilities. Meanwhile, these advances also enable models to handle more complex prompts, whereas current benchmarks remain limited to low scene density and simplified one-to-one reasoning. To address these limitations, we propose T2I-CoReBench, a comprehensive and complex benchmark that evaluates both composition and reasoning capabilities of T2I models. To ensure comprehensiveness, we structure composition around scene graph elements (instance, attribute, and relation) and reasoning around the philosophical framework of inference (deductive, inductive, and abductive), formulating a 12-dimensional evaluation taxonomy. To increase complexity, driven by the inherent complexities of real-world scenarios, we curate each prompt with high compositional density for composition and multi-step inference for reasoning. We also pair each prompt with a checklist that specifies individual yes/no questions to assess each intended element independently to facilitate fine-grained and reliable evaluation. In statistics, our benchmark comprises 1,080 challenging prompts and around 13,500 checklist questions. Experiments across 27 current T2I models reveal that their composition capability still remains limited in complex high-density scenarios, while the reasoning capability lags even further behind as a critical bottleneck, with all models struggling to infer implicit elements from prompts. Our project page: https://t2i-corebench.github.io/.
MedReseacher-R1: Expert-Level Medical Deep Researcher via A Knowledge-Informed Trajectory Synthesis Framework
Aug 20, 2025Recent developments in Large Language Model (LLM)-based agents have shown impressive capabilities spanning multiple domains, exemplified by deep research systems that demonstrate superior performance on complex information-seeking and synthesis tasks. While general-purpose deep research agents have shown impressive capabilities, they struggle significantly with medical domain challenges, as evidenced by leading proprietary systems achieving limited accuracy on complex medical benchmarks. The key limitations are: (1) the model lacks sufficient dense medical knowledge for clinical reasoning, and (2) the framework is constrained by the absence of specialized retrieval tools tailored for medical contexts.We present a medical deep research agent that addresses these challenges through two core innovations. First, we develop a novel data synthesis framework using medical knowledge graphs, extracting the longest chains from subgraphs around rare medical entities to generate complex multi-hop question-answer pairs. Second, we integrate a custom-built private medical retrieval engine alongside general-purpose tools, enabling accurate medical information synthesis. Our approach generates 2100+ diverse trajectories across 12 medical specialties, each averaging 4.2 tool interactions.Through a two-stage training paradigm combining supervised fine-tuning and online reinforcement learning with composite rewards, our MedResearcher-R1-32B model demonstrates exceptional performance, establishing new state-of-the-art results on medical benchmarks while maintaining competitive performance on general deep research tasks. Our work demonstrates that strategic domain-specific innovations in architecture, tool design, and training data construction can enable smaller open-source models to outperform much larger proprietary systems in specialized domains.
Improving Learning of New Diseases through Knowledge-Enhanced Initialization for Federated Adapter Tuning
Aug 14, 2025



In healthcare, federated learning (FL) is a widely adopted framework that enables privacy-preserving collaboration among medical institutions. With large foundation models (FMs) demonstrating impressive capabilities, using FMs in FL through cost-efficient adapter tuning has become a popular approach. Given the rapidly evolving healthcare environment, it is crucial for individual clients to quickly adapt to new tasks or diseases by tuning adapters while drawing upon past experiences. In this work, we introduce Federated Knowledge-Enhanced Initialization (FedKEI), a novel framework that leverages cross-client and cross-task transfer from past knowledge to generate informed initializations for learning new tasks with adapters. FedKEI begins with a global clustering process at the server to generalize knowledge across tasks, followed by the optimization of aggregation weights across clusters (inter-cluster weights) and within each cluster (intra-cluster weights) to personalize knowledge transfer for each new task. To facilitate more effective learning of the inter- and intra-cluster weights, we adopt a bi-level optimization scheme that collaboratively learns the global intra-cluster weights across clients and optimizes the local inter-cluster weights toward each client's task objective. Extensive experiments on three benchmark datasets of different modalities, including dermatology, chest X-rays, and retinal OCT, demonstrate FedKEI's advantage in adapting to new diseases compared to state-of-the-art methods.
GLM-4.1V-Thinking: Towards Versatile Multimodal Reasoning with Scalable Reinforcement Learning
Jul 02, 2025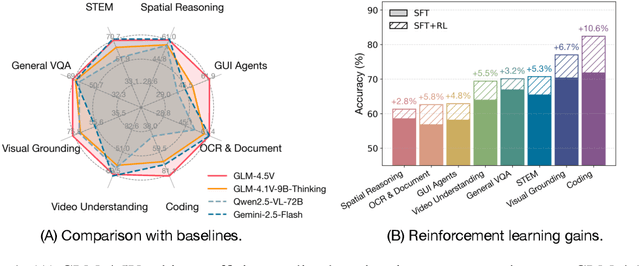
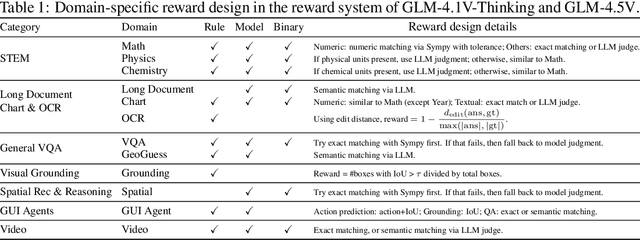
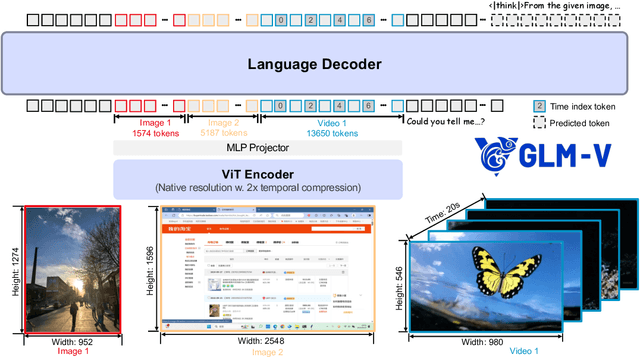

We present GLM-4.1V-Thinking, a vision-language model (VLM) designed to advance general-purpose multimodal understanding and reasoning. In this report, we share our key findings in the development of the reasoning-centric training framework. We first develop a capable vision foundation model with significant potential through large-scale pre-training, which arguably sets the upper bound for the final performance. We then propose Reinforcement Learning with Curriculum Sampling (RLCS) to unlock the full potential of the model, leading to comprehensive capability enhancement across a diverse range of tasks, including STEM problem solving, video understanding, content recognition, coding, grounding, GUI-based agents, and long document understanding. We open-source GLM-4.1V-9B-Thinking, which achieves state-of-the-art performance among models of comparable size. In a comprehensive evaluation across 28 public benchmarks, our model outperforms Qwen2.5-VL-7B on nearly all tasks and achieves comparable or even superior performance on 18 benchmarks relative to the significantly larger Qwen2.5-VL-72B. Notably, GLM-4.1V-9B-Thinking also demonstrates competitive or superior performance compared to closed-source models such as GPT-4o on challenging tasks including long document understanding and STEM reasoning, further underscoring its strong capabilities. Code, models and more information are released at https://github.com/THUDM/GLM-4.1V-Thinking.
CAPO: Reinforcing Consistent Reasoning in Medical Decision-Making
Jun 15, 2025



In medical visual question answering (Med-VQA), achieving accurate responses relies on three critical steps: precise perception of medical imaging data, logical reasoning grounded in visual input and textual questions, and coherent answer derivation from the reasoning process. Recent advances in general vision-language models (VLMs) show that large-scale reinforcement learning (RL) could significantly enhance both reasoning capabilities and overall model performance. However, their application in medical domains is hindered by two fundamental challenges: 1) misalignment between perceptual understanding and reasoning stages, and 2) inconsistency between reasoning pathways and answer generation, both compounded by the scarcity of high-quality medical datasets for effective large-scale RL. In this paper, we first introduce Med-Zero-17K, a curated dataset for pure RL-based training, encompassing over 30 medical image modalities and 24 clinical tasks. Moreover, we propose a novel large-scale RL framework for Med-VLMs, Consistency-Aware Preference Optimization (CAPO), which integrates rewards to ensure fidelity between perception and reasoning, consistency in reasoning-to-answer derivation, and rule-based accuracy for final responses. Extensive experiments on both in-domain and out-of-domain scenarios demonstrate the superiority of our method over strong VLM baselines, showcasing strong generalization capability to 3D Med-VQA benchmarks and R1-like training paradigms.
Med-U1: Incentivizing Unified Medical Reasoning in LLMs via Large-scale Reinforcement Learning
Jun 14, 2025



Medical Question-Answering (QA) encompasses a broad spectrum of tasks, including multiple choice questions (MCQ), open-ended text generation, and complex computational reasoning. Despite this variety, a unified framework for delivering high-quality medical QA has yet to emerge. Although recent progress in reasoning-augmented large language models (LLMs) has shown promise, their ability to achieve comprehensive medical understanding is still largely unexplored. In this paper, we present Med-U1, a unified framework for robust reasoning across medical QA tasks with diverse output formats, ranging from MCQs to complex generation and computation tasks. Med-U1 employs pure large-scale reinforcement learning with mixed rule-based binary reward functions, incorporating a length penalty to manage output verbosity. With multi-objective reward optimization, Med-U1 directs LLMs to produce concise and verifiable reasoning chains. Empirical results reveal that Med-U1 significantly improves performance across multiple challenging Med-QA benchmarks, surpassing even larger specialized and proprietary models. Furthermore, Med-U1 demonstrates robust generalization to out-of-distribution (OOD) tasks. Extensive analysis presents insights into training strategies, reasoning chain length control, and reward design for medical LLMs. The code will be released.
ELGAR: Expressive Cello Performance Motion Generation for Audio Rendition
May 07, 2025The art of instrument performance stands as a vivid manifestation of human creativity and emotion. Nonetheless, generating instrument performance motions is a highly challenging task, as it requires not only capturing intricate movements but also reconstructing the complex dynamics of the performer-instrument interaction. While existing works primarily focus on modeling partial body motions, we propose Expressive ceLlo performance motion Generation for Audio Rendition (ELGAR), a state-of-the-art diffusion-based framework for whole-body fine-grained instrument performance motion generation solely from audio. To emphasize the interactive nature of the instrument performance, we introduce Hand Interactive Contact Loss (HICL) and Bow Interactive Contact Loss (BICL), which effectively guarantee the authenticity of the interplay. Moreover, to better evaluate whether the generated motions align with the semantic context of the music audio, we design novel metrics specifically for string instrument performance motion generation, including finger-contact distance, bow-string distance, and bowing score. Extensive evaluations and ablation studies are conducted to validate the efficacy of the proposed methods. In addition, we put forward a motion generation dataset SPD-GEN, collated and normalized from the MoCap dataset SPD. As demonstrated, ELGAR has shown great potential in generating instrument performance motions with complicated and fast interactions, which will promote further development in areas such as animation, music education, interactive art creation, etc.
Comparing Uncertainty Measurement and Mitigation Methods for Large Language Models: A Systematic Review
Apr 25, 2025



Large Language Models (LLMs) have been transformative across many domains. However, hallucination -- confidently outputting incorrect information -- remains one of the leading challenges for LLMs. This raises the question of how to accurately assess and quantify the uncertainty of LLMs. Extensive literature on traditional models has explored Uncertainty Quantification (UQ) to measure uncertainty and employed calibration techniques to address the misalignment between uncertainty and accuracy. While some of these methods have been adapted for LLMs, the literature lacks an in-depth analysis of their effectiveness and does not offer a comprehensive benchmark to enable insightful comparison among existing solutions. In this work, we fill this gap via a systematic survey of representative prior works on UQ and calibration for LLMs and introduce a rigorous benchmark. Using two widely used reliability datasets, we empirically evaluate six related methods, which justify the significant findings of our review. Finally, we provide outlooks for key future directions and outline open challenges. To the best of our knowledge, this survey is the first dedicated study to review the calibration methods and relevant metrics for LLMs.
OmniV-Med: Scaling Medical Vision-Language Model for Universal Visual Understanding
Apr 20, 2025



The practical deployment of medical vision-language models (Med-VLMs) necessitates seamless integration of textual data with diverse visual modalities, including 2D/3D images and videos, yet existing models typically employ separate encoders for different modalities. To address this limitation, we present OmniV-Med, a unified framework for multimodal medical understanding. Our technical contributions are threefold: First, we construct OmniV-Med-Instruct, a comprehensive multimodal medical dataset containing 252K instructional samples spanning 14 medical image modalities and 11 clinical tasks. Second, we devise a rotary position-adaptive encoder that processes multi-resolution 2D/3D images and videos within a unified architecture, diverging from conventional modality-specific encoders. Third, we introduce a medical-aware token pruning mechanism that exploits spatial-temporal redundancy in volumetric data (e.g., consecutive CT slices) and medical videos, effectively reducing 60\% of visual tokens without performance degradation. Empirical evaluations demonstrate that OmniV-Med-7B achieves state-of-the-art performance on 7 benchmarks spanning 2D/3D medical imaging and video understanding tasks. Notably, our lightweight variant (OmniV-Med-1.5B) attains comparable performance while requiring only 8 RTX3090 GPUs for training and supporting efficient long-video inference. Data, code and model will be released.