 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey of Legged Robotics in Non-Inertial Environments: Past, Present, and Future
Apr 22, 2026Legged robots have demonstrated remarkable agility on rigid, stationary ground, but their locomotion reliability remains limited in non-inertial environments, where the supporting ground moves, tilts, or accelerates. Such conditions arise in ground transportation, maritime platforms, and aerospace settings, and they introduce persistent time-varying disturbances that break the stationary-ground assumptions underlying conventional legged locomotion. This survey reviews the state of the art in modeling, state estimation, and control for legged robots in non-inertial environments. We summarize representative application domains and motion characteristics, analyze the root causes of locomotion performance degradation, and review existing methods together with their key assumptions and limitations. We further identify open problems in robot-environment coupling, observability, robustness, and experimental validation, and discuss future directions in autonomy, system-level design, bio-inspired strategies, safety, and testing. The survey aims to clarify the technical foundations of this emerging area and support the development of reliable legged robots for real-world dynamic environments.
Vectorizing Projection in Manifold-Constrained Motion Planning for Real-Time Whole-Body Control
Apr 14, 2026Many robot planning tasks require satisfaction of one or more constraints throughout the entire trajectory. For geometric constraints, manifold-constrained motion planning algorithms are capable of planning collision-free path between start and goal configurations on the constraint submanifolds specified by task. Current state-of-the-art methods can take tens of seconds to solve these tasks for complex systems such as humanoid robots, making real-world use impractical, especially in dynamic settings. Inspired by recent advances in hardware accelerated motion planning, we present a CPU SIMD-accelerated manifold-constrained motion planner that revisits projection-based constraint satisfaction through the lens of parallelization. By transforming relevant components into parallelizable structures, we use SIMD parallelism to plan constraint satisfying solutions. Our approach achieves up to 100-1000x speed-ups over the state-of-the-art, making real-time constrained motion planning feasible for the first time. We demonstrate our planner on a real humanoid robot and show real-time whole-body quasi-static plan generation. Our work is available at https://commalab.org/papers/mcvamp/.
Modular Safety Guardrails Are Necessary for Foundation-Model-Enabled Robots in the Real World
Feb 03, 2026The integration of foundation models (FMs) into robotics has accelerated real-world deployment, while introducing new safety challenges arising from open-ended semantic reasoning and embodied physical action. These challenges require safety notions beyond physical constraint satisfaction. In this paper, we characterize FM-enabled robot safety along three dimensions: action safety (physical feasibility and constraint compliance), decision safety (semantic and contextual appropriateness), and human-centered safety (conformance to human intent, norms, and expectations). We argue that existing approaches, including static verification, monolithic controllers, and end-to-end learned policies, are insufficient in settings where tasks, environments, and human expectations are open-ended, long-tailed, and subject to adaptation over time. To address this gap, we propose modular safety guardrails, consisting of monitoring (evaluation) and intervention layers, as an architectural foundation for comprehensive safety across the autonomy stack. Beyond modularity, we highlight possible cross-layer co-design opportunities through representation alignment and conservatism allocation to enable faster, less conservative, and more effective safety enforcement. We call on the community to explore richer guardrail modules and principled co-design strategies to advance safe real-world physical AI deployment.
Multiscale Cross-Modal Mapping of Molecular, Pathologic, and Radiologic Phenotypes in Lipid-Deficient Clear Cell Renal CellCarcinoma
Dec 13, 2025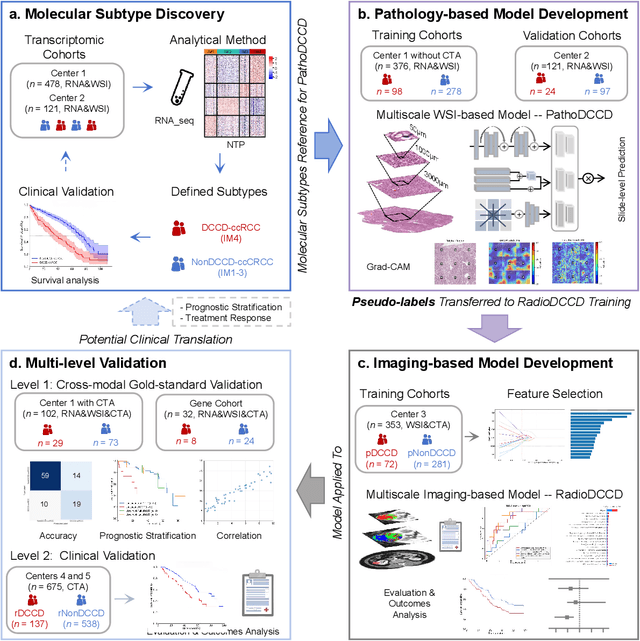
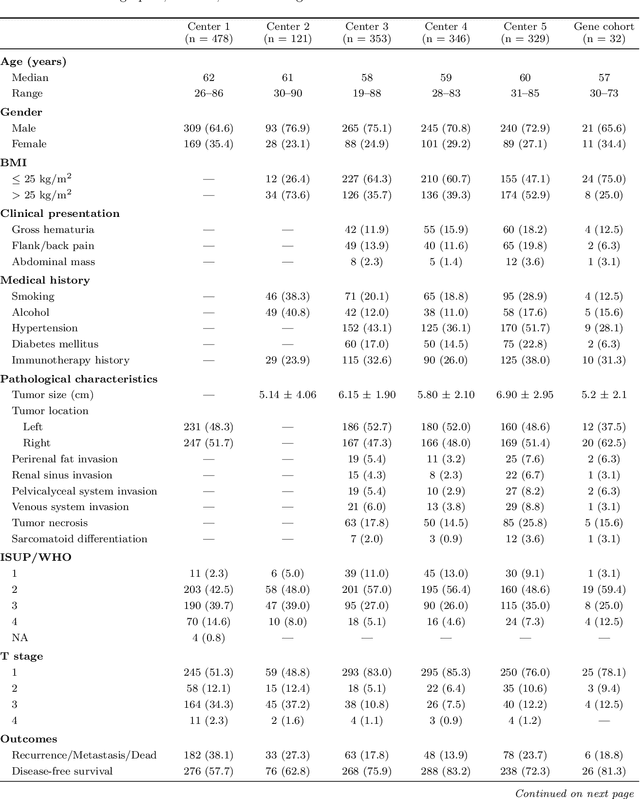
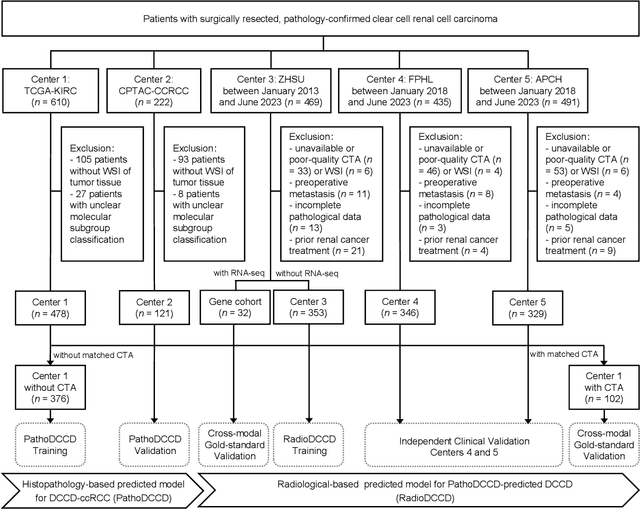
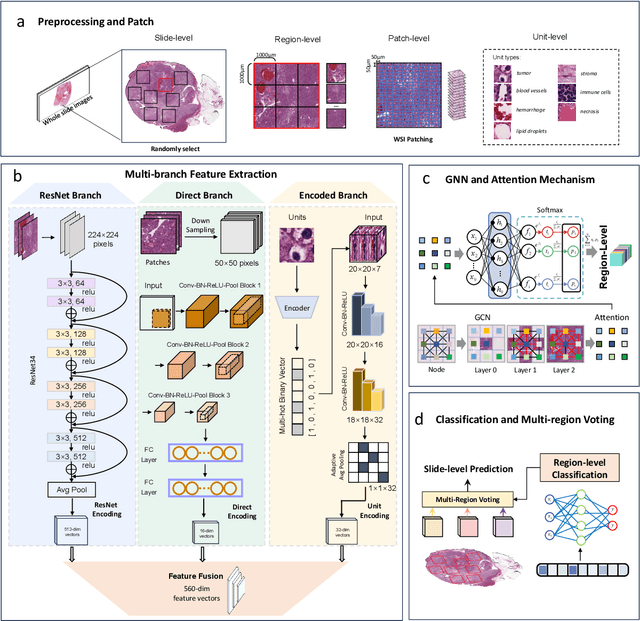
Clear cell renal cell carcinoma (ccRCC) exhibits extensive intratumoral heterogeneity on multiple biological scales, contributing to variable clinical outcomes and limiting the effectiveness of conventional TNM staging, which highlights the urgent need for multiscale integrative analytic frameworks. The lipid-deficient de-clear cell differentiated (DCCD) ccRCC subtype, defined by multi-omics analyses, is associated with adverse outcomes even in early-stage disease. Here, we establish a hierarchical cross-scale framework for the preoperative identification of DCCD-ccRCC. At the highest layer, cross-modal mapping transferred molecular signatures to histological and CT phenotypes, establishing a molecular-to-pathology-to-radiology supervisory bridge. Within this framework, each modality-specific model is designed to mirror the inherent hierarchical structure of tumor biology. PathoDCCD captured multi-scale microscopic features, from cellular morphology and tissue architecture to meso-regional organization. RadioDCCD integrated complementary macroscopic information by combining whole-tumor and its habitat-subregions radiomics with a 2D maximal-section heterogeneity metric. These nested models enabled integrated molecular subtype prediction and clinical risk stratification. Across five cohorts totaling 1,659 patients, PathoDCCD reliably recapitulated molecular subtypes, while RadioDCCD provided reliable preoperative prediction. The consistent predictions identified patients with the poorest clinical outcomes. This cross-scale paradigm unifies molecular biology, computational pathology, and quantitative radiology into a biologically grounded strategy for preoperative noninvasive molecular phenotyping of ccRCC.
MBE-ARI: A Multimodal Dataset Mapping Bi-directional Engagement in Animal-Robot Interaction
Apr 11, 2025



Animal-robot interaction (ARI) remains an unexplored challenge in robotics, as robots struggle to interpret the complex, multimodal communication cues of animals, such as body language, movement, and vocalizations. Unlike human-robot interaction, which benefits from established datasets and frameworks, animal-robot interaction lacks the foundational resources needed to facilitate meaningful bidirectional communication. To bridge this gap, we present the MBE-ARI (Multimodal Bidirectional Engagement in Animal-Robot Interaction), a novel multimodal dataset that captures detailed interactions between a legged robot and cows. The dataset includes synchronized RGB-D streams from multiple viewpoints, annotated with body pose and activity labels across interaction phases, offering an unprecedented level of detail for ARI research. Additionally, we introduce a full-body pose estimation model tailored for quadruped animals, capable of tracking 39 keypoints with a mean average precision (mAP) of 92.7%, outperforming existing benchmarks in animal pose estimation. The MBE-ARI dataset and our pose estimation framework lay a robust foundation for advancing research in animal-robot interaction, providing essential tools for developing perception, reasoning, and interaction frameworks needed for effective collaboration between robots and animals. The dataset and resources are publicly available at https://github.com/RISELabPurdue/MBE-ARI/, inviting further exploration and development in this critical area.
Leveraging Perturbation Robustness to Enhance Out-of-Distribution Detection
Mar 24, 2025Out-of-distribution (OOD) detection is the task of identifying inputs that deviate from the training data distribution. This capability is essential for safely deploying deep computer vision models in open-world environments. In this work, we propose a post-hoc method, Perturbation-Rectified OOD detection (PRO), based on the insight that prediction confidence for OOD inputs is more susceptible to reduction under perturbation than in-distribution (IND) inputs. Based on the observation, we propose an adversarial score function that searches for the local minimum scores near the original inputs by applying gradient descent. This procedure enhances the separability between IND and OOD samples. Importantly, the approach improves OOD detection performance without complex modifications to the underlying model architectures. We conduct extensive experiments using the OpenOOD benchmark~\cite{yang2022openood}. Our approach further pushes the limit of softmax-based OOD detection and is the leading post-hoc method for small-scale models. On a CIFAR-10 model with adversarial training, PRO effectively detects near-OOD inputs, achieving a reduction of more than 10\% on FPR@95 compared to state-of-the-art methods.
Deep Reinforcement Learning for Job Scheduling and Resource Management in Cloud Computing: An Algorithm-Level Review
Jan 02, 2025



Cloud computing has revolutionized the provisioning of computing resources, offering scalable, flexible, and on-demand services to meet the diverse requirements of modern applications. At the heart of efficient cloud operations are job scheduling and resource management, which are critical for optimizing system performance and ensuring timely and cost-effective service delivery. However, the dynamic and heterogeneous nature of cloud environments presents significant challenges for these tasks, as workloads and resource availability can fluctuate unpredictably. Traditional approaches, including heuristic and meta-heuristic algorithms, often struggle to adapt to these real-time changes due to their reliance on static models or predefined rules. Deep Reinforcement Learning (DRL) has emerged as a promising solution to these challenges by enabling systems to learn and adapt policies based on continuous observations of the environment, facilitating intelligent and responsive decision-making. This survey provides a comprehensive review of DRL-based algorithms for job scheduling and resource management in cloud computing, analyzing their methodologies, performance metrics, and practical applications. We also highlight emerging trends and future research directions, offering valuable insights into leveraging DRL to advance both job scheduling and resource management in cloud computing.
Findings of the WMT 2024 Shared Task on Discourse-Level Literary Translation
Dec 16, 2024Following last year, we have continued to host the WMT translation shared task this year, the second edition of the Discourse-Level Literary Translation. We focus on three language directions: Chinese-English, Chinese-German, and Chinese-Russian, with the latter two ones newly added. This year, we totally received 10 submissions from 5 academia and industry teams. We employ both automatic and human evaluations to measure the performance of the submitted systems. The official ranking of the systems is based on the overall human judgments. We release data, system outputs, and leaderboard at https://www2.statmt.org/wmt24/literary-translation-task.html.
Adaptive Ankle Torque Control for Bipedal Humanoid Walking on Surfaces with Unknown Horizontal and Vertical Motion
Oct 15, 2024



Achieving stable bipedal walking on surfaces with unknown motion remains a challenging control problem due to the hybrid, time-varying, partially unknown dynamics of the robot and the difficulty of accurate state and surface motion estimation. Surface motion imposes uncertainty on both system parameters and non-homogeneous disturbance in the walking robot dynamics. In this paper, we design an adaptive ankle torque controller to simultaneously address these two uncertainties and propose a step-length planner to minimize the required control torque. Typically, an adaptive controller is used for a continuous system. To apply adaptive control on a hybrid system such as a walking robot, an intermediate command profile is introduced to ensure a continuous error system. Simulations on a planar bipedal robot, along with comparisons against a baseline controller, demonstrate that the proposed approach effectively ensures stable walking and accurate tracking under unknown, time-varying disturbances.
Time-Varying Foot-Placement Control for Underactuated Humanoid Walking on Swaying Rigid Surfaces
Sep 12, 2024Locomotion on dynamic rigid surface (i.e., rigid surface accelerating in an inertial frame) presents complex challenges for controller design, which are essential for deploying humanoid robots in dynamic real-world environments such as moving trains, ships, and airplanes. This paper introduces a real-time, provably stabilizing control approach for underactuated humanoid walking on periodically swaying rigid surface. The first key contribution is the analytical extension of the classical angular momentum-based linear inverted pendulum model from static to swaying grounds. This extension results in a time-varying, nonhomogeneous robot model, which is fundamentally different from the existing pendulum models. We synthesize a discrete footstep control law for the model and derive a new set of sufficient stability conditions that verify the controller's stabilizing effect. Another key contribution is the development of a hierarchical control framework that incorporates the proposed footstep control law as its higher-layer planner to ensure the stability of underactuated walking. The closed-loop stability of the complete hybrid, full-order robot dynamics under this control framework is provably analyzed based on nonlinear control theory. Finally, experiments conducted on a Digit humanoid robot, both in simulations and with hardware, demonstrate the framework's effectiveness in addressing underactuated bipedal locomotion on swaying ground, even in the presence of uncertain surface motions and unknown external pushes.