 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTime-Varying Foot-Placement Control for Underactuated Humanoid Walking on Swaying Rigid Surfaces
Sep 12, 2024Locomotion on dynamic rigid surface (i.e., rigid surface accelerating in an inertial frame) presents complex challenges for controller design, which are essential for deploying humanoid robots in dynamic real-world environments such as moving trains, ships, and airplanes. This paper introduces a real-time, provably stabilizing control approach for underactuated humanoid walking on periodically swaying rigid surface. The first key contribution is the analytical extension of the classical angular momentum-based linear inverted pendulum model from static to swaying grounds. This extension results in a time-varying, nonhomogeneous robot model, which is fundamentally different from the existing pendulum models. We synthesize a discrete footstep control law for the model and derive a new set of sufficient stability conditions that verify the controller's stabilizing effect. Another key contribution is the development of a hierarchical control framework that incorporates the proposed footstep control law as its higher-layer planner to ensure the stability of underactuated walking. The closed-loop stability of the complete hybrid, full-order robot dynamics under this control framework is provably analyzed based on nonlinear control theory. Finally, experiments conducted on a Digit humanoid robot, both in simulations and with hardware, demonstrate the framework's effectiveness in addressing underactuated bipedal locomotion on swaying ground, even in the presence of uncertain surface motions and unknown external pushes.
Time-Varying ALIP Model and Robust Foot-Placement Control for Underactuated Bipedal Robot Walking on a Swaying Rigid Surface
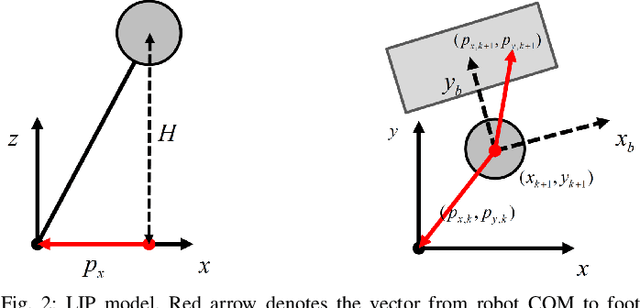
Oct 24, 2022Controller design for bipedal walking on dynamic rigid surfaces (DRSes), which are rigid surfaces moving in the inertial frame (e.g., ships and airplanes), remains largely uninvestigated. This paper introduces a hierarchical control approach that achieves stable underactuated bipedal robot walking on a horizontally oscillating DRS. The highest layer of our approach is a real-time motion planner that generates desired global behaviors (i.e., the center of mass trajectories and footstep locations) by stabilizing a reduced-order robot model. One key novelty of this layer is the derivation of the reduced-order model by analytically extending the angular momentum based linear inverted pendulum (ALIP) model from stationary to horizontally moving surfaces. The other novelty is the development of a discrete-time foot-placement controller that exponentially stabilizes the hybrid, linear, time-varying ALIP model. The middle layer of the proposed approach is a walking pattern generator that translates the desired global behaviors into the robot's full-body reference trajectories for all directly actuated degrees of freedom. The lowest layer is an input-output linearizing controller that exponentially tracks those full-body reference trajectories based on the full-order, hybrid, nonlinear robot dynamics. Simulations of planar underactuated bipedal walking on a swaying DRS confirm that the proposed framework ensures the walking stability under different DRS motions and gait types.
Terrain-Aware Foot Placement for Bipedal Locomotion Combining Model Predictive Control, Virtual Constraints, and the ALIP
Sep 30, 2021
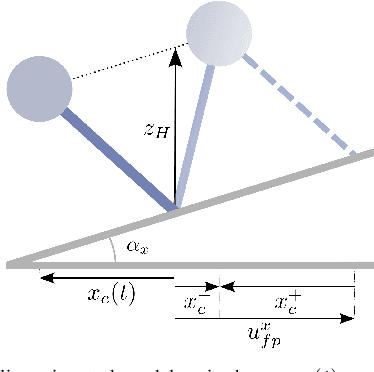
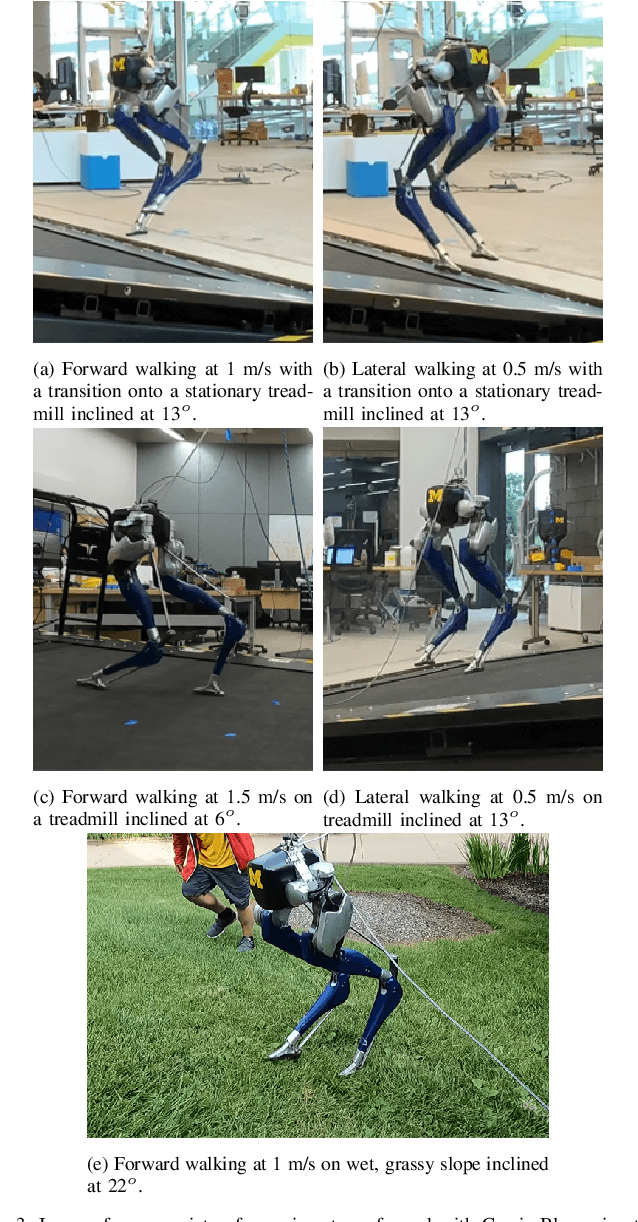
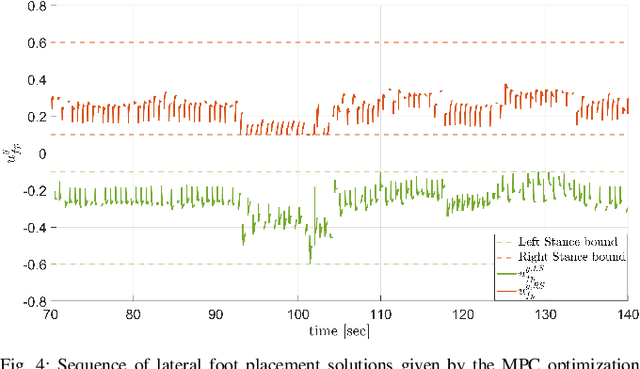
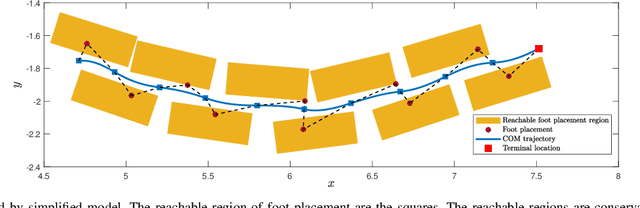
This paper draws upon three themes in the bipedal control literature to achieve highly agile, terrain-aware locomotion. By terrain aware, we mean the robot can use information on terrain slope and friction cone as supplied by state-of-the-art mapping and trajectory planning algorithms. The process starts with abstracting from the full dynamics of a Cassie 3D bipedal robot, an exact low-dimensional representation of its centroidal dynamics, parameterized by angular momentum. Under a piecewise planar terrain assumption, and the elimination of terms for the angular momentum about the robot's center of mass, the centroidal dynamics become linear and has dimension four. Four-step-horizon model predictive control (MPC) of the centroidal dynamics provides step-to-step foot placement commands. Importantly, we also include the intra-step dynamics at 10 ms intervals so that realistic terrain-aware constraints on robot's evolution can be imposed in the MPC formulation. The output of the MPC is directly implemented on Cassie through the method of virtual constraints. In experiments, we validate the performance of our control strategy for the robot on inclined and stationary terrain, both indoors on a treadmill and outdoors on a hill.
Zero Dynamics, Pendulum Models, and Angular Momentum in Feedback Control of Bipedal Locomotion
May 17, 2021
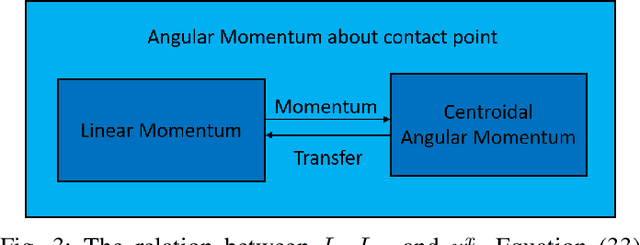
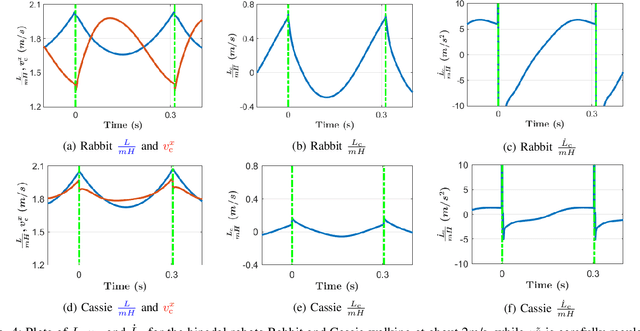
Low-dimensional models are ubiquitous in the bipedal robotics literature. On the one hand, are the simplified pendulum models selected to capture the center of mass dynamics. On the other hand, is the passive low-dimensional model induced by virtual constraints. In the first case, the low-dimensional model is valued for its physical insight and analytical tractability. In the second case, the low-dimensional model is integral to a rigorous analysis of the stability of walking gaits in the full-dimensional model of the robot. This paper brings these two approaches together, clarifying their commonalities and differences. In the process of doing so, we argue that angular momentum about the contact point is a better indicator of robot state than linear velocity. Concretely, we show that an approximate (pendulum and zero dynamics) model parameterized by angular momentum is more accurate on a physical robot (e.g., legs with mass) than is a related approximate model parameterized in terms of linear velocity. We implement an associated angular-momentum-based controller on Cassie, a 3D robot, and demonstrate high agility and robustness in experiments.
Toward Safety-Aware Informative Motion Planning for Legged Robots
Mar 26, 2021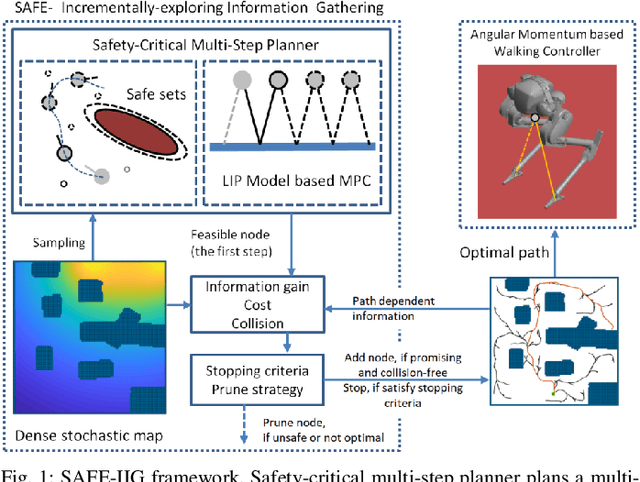
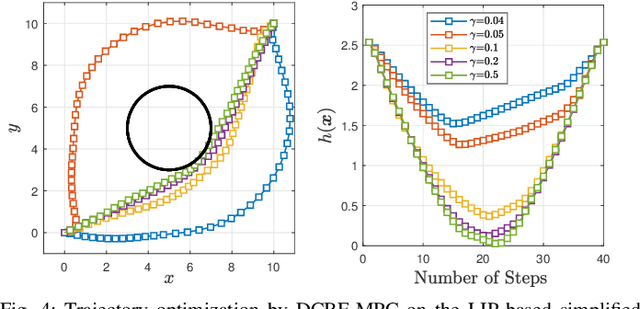
This paper reports on developing an integrated framework for safety-aware informative motion planning suitable for legged robots. The information-gathering planner takes a dense stochastic map of the environment into account, while safety constraints are enforced via Control Barrier Functions (CBFs). The planner is based on the Incrementally-exploring Information Gathering (IIG) algorithm and allows closed-loop kinodynamic node expansion using a Model Predictive Control (MPC) formalism. Robotic exploration and information gathering problems are inherently path-dependent problems. That is, the information collected along a path depends on the state and observation history. As such, motion planning solely based on a modular cost does not lead to suitable plans for exploration. We propose SAFE-IIG, an integrated informative motion planning algorithm that takes into account: 1) a robot's perceptual field of view via a submodular information function computed over a stochastic map of the environment, 2) a robot's dynamics and safety constraints via discrete-time CBFs and MPC for closed-loop multi-horizon node expansions, and 3) an automatic stopping criterion via setting an information-theoretic planning horizon. The simulation results show that SAFE-IIG can plan a safe and dynamically feasible path while exploring a dense map.
Angular Momentum about the Contact Point for Control of Bipedal Locomotion: Validation in a LIP-based Controller
Aug 25, 2020
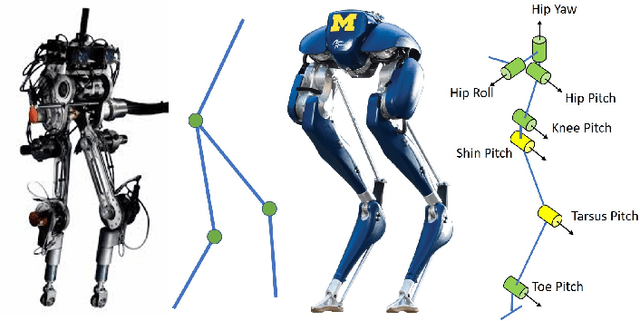
In the control of bipedal locomotion, linear velocity of the center of mass has been widely accepted as a primary variable for summarizing a robot's state vector. The ubiquitous massless-legged linear inverted pendulum (LIP) model is based on it. In this paper, we argue that angular momentum about the contact point has several properties that make it superior to linear velocity for feedback control. So as not to confuse the benefits of angular momentum with any other control design decisions, we first reformulate the standard LIP controller in terms of angular momentum. We then implement the resulting feedback controller on the 20 degree-of-freedom bipedal robot, Cassie Blue, where each leg accounts for nearly one-third of the robot's total mass of 35~Kg. Under this controller, the robot achieves fast walking, rapid turning while walking, large disturbance rejection, and locomotion on rough terrain. The reasoning developed in the paper is applicable to other control design philosophies, whether they be Hybrid Zero Dynamics or Reinforcement Learning.
Rapid Trajectory Optimization Using C-FROST with Illustration on a Cassie-Series Dynamic Walking Biped
Mar 15, 2019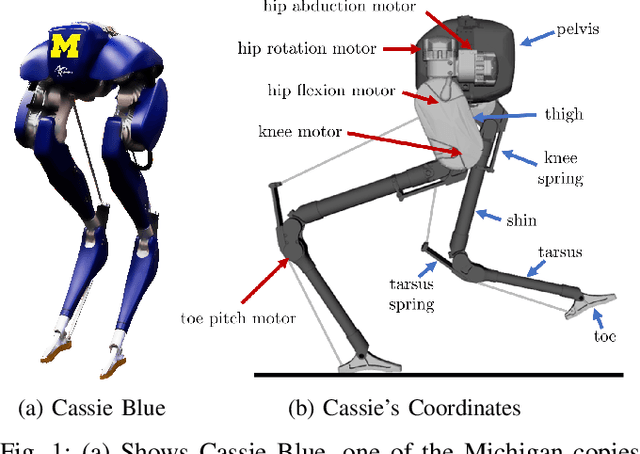
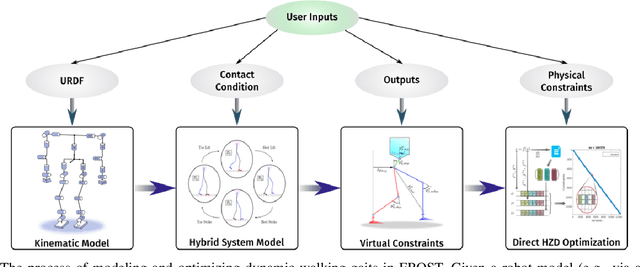
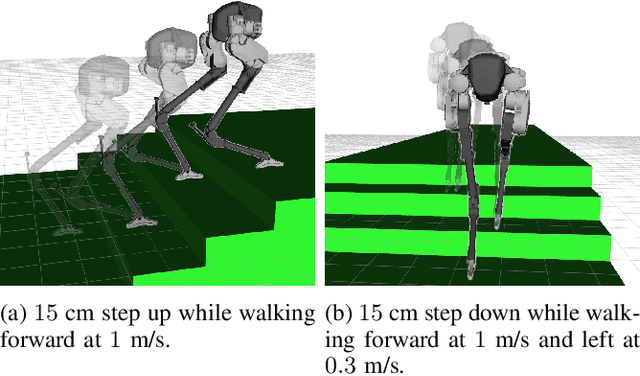
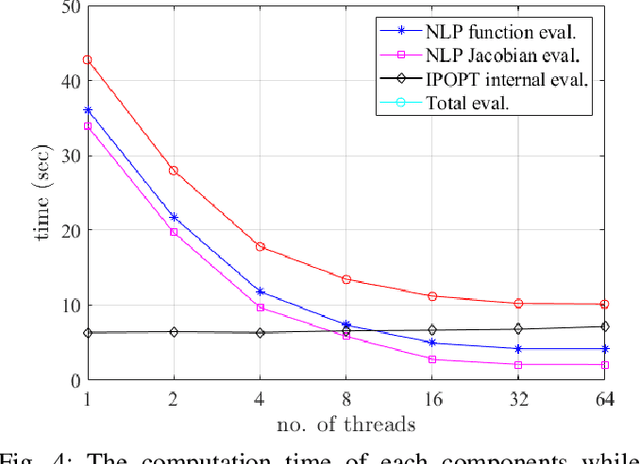
One of the big attractions of low-dimensional models for gait design has been the ability to compute solutions rapidly, whereas one of their drawbacks has been the difficulty in mapping the solutions back to the target robot. This paper presents a set of tools for rapidly determining solutions for ``humanoids'' without removing or lumping degrees of freedom. The main tools are (1) C-FROST, an open-source C++ interface for FROST, a direct collocation optimization tool; and (2) multi-threading. The results will be illustrated on a 20-DoF floating-base model for a Cassie-series bipedal robot through numerical calculations and physical experiments.
Feedback Control of a Cassie Bipedal Robot: Walking, Standing, and Riding a Segway
Sep 19, 2018
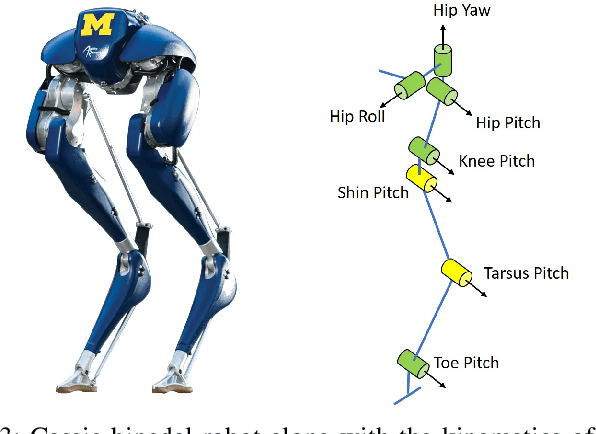
The Cassie bipedal robot designed by Agility Robotics is providing academics a common platform for sharing and comparing algorithms for locomotion, perception, and navigation. This paper focuses on feedback control for standing and walking using the methods of virtual constraints and gait libraries. The designed controller was implemented six weeks after the robot arrived at the University of Michigan and allowed it to stand in place as well as walk over sidewalks, grass, snow, sand, and burning brush. The controller for standing also enables the robot to ride a Segway. A model of the Cassie robot has been placed on GitHub and the controller will also be made open source if the paper is accepted.