 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Safe Bipedal Robot Navigation using Linear Discrete Control Barrier Functions
Nov 06, 2024Safe navigation in real-time is an essential task for humanoid robots in real-world deployment. Since humanoid robots are inherently underactuated thanks to unilateral ground contacts, a path is considered safe if it is obstacle-free and respects the robot's physical limitations and underlying dynamics. Existing approaches often decouple path planning from gait control due to the significant computational challenge caused by the full-order robot dynamics. In this work, we develop a unified, safe path and gait planning framework that can be evaluated online in real-time, allowing the robot to navigate clustered environments while sustaining stable locomotion. Our approach uses the popular Linear Inverted Pendulum (LIP) model as a template model to represent walking dynamics. It incorporates heading angles in the model to evaluate kinematic constraints essential for physically feasible gaits properly. In addition, we leverage discrete control barrier functions (DCBF) for obstacle avoidance, ensuring that the subsequent foot placement provides a safe navigation path within clustered environments. To guarantee real-time computation, we use a novel approximation of the DCBF to produce linear DCBF (LDCBF) constraints. We validate the proposed approach in simulation using a Digit robot in randomly generated environments. The results demonstrate that our approach can generate safe gaits for a non-trivial humanoid robot to navigate environments with randomly generated obstacles in real-time.
Time-Varying Foot-Placement Control for Underactuated Humanoid Walking on Swaying Rigid Surfaces
Sep 12, 2024Locomotion on dynamic rigid surface (i.e., rigid surface accelerating in an inertial frame) presents complex challenges for controller design, which are essential for deploying humanoid robots in dynamic real-world environments such as moving trains, ships, and airplanes. This paper introduces a real-time, provably stabilizing control approach for underactuated humanoid walking on periodically swaying rigid surface. The first key contribution is the analytical extension of the classical angular momentum-based linear inverted pendulum model from static to swaying grounds. This extension results in a time-varying, nonhomogeneous robot model, which is fundamentally different from the existing pendulum models. We synthesize a discrete footstep control law for the model and derive a new set of sufficient stability conditions that verify the controller's stabilizing effect. Another key contribution is the development of a hierarchical control framework that incorporates the proposed footstep control law as its higher-layer planner to ensure the stability of underactuated walking. The closed-loop stability of the complete hybrid, full-order robot dynamics under this control framework is provably analyzed based on nonlinear control theory. Finally, experiments conducted on a Digit humanoid robot, both in simulations and with hardware, demonstrate the framework's effectiveness in addressing underactuated bipedal locomotion on swaying ground, even in the presence of uncertain surface motions and unknown external pushes.
Unified Path and Gait Planning for Safe Bipedal Robot Navigation
Mar 26, 2024Safe path and gait planning are essential for bipedal robots to navigate complex real-world environments. The prevailing approaches often plan the path and gait separately in a hierarchical fashion, potentially resulting in unsafe movements due to neglecting the physical constraints of walking robots. A safety-critical path must not only avoid obstacles but also ensure that the robot's gaits are subject to its dynamic and kinematic constraints. This work presents a novel approach that unifies path planning and gait planning via a Model Predictive Control (MPC) using the Linear Inverted Pendulum (LIP) model representing bipedal locomotion. This approach considers environmental constraints, such as obstacles, and the robot's kinematics and dynamics constraints. By using discrete-time Control Barrier Functions for obstacle avoidance, our approach generates the next foot landing position, ensuring robust walking gaits and a safe navigation path within clustered environments. We validated our proposed approach in simulation using a Digit robot in 20 randomly created environments. The results demonstrate improved performance in terms of safety and robustness when compared to hierarchical path and gait planning frameworks.
Adaptive Step Duration for Precise Foot Placement: Achieving Robust Bipedal Locomotion on Terrains with Restricted Footholds
Mar 25, 2024



This paper introduces a novel multi-step preview foot placement planning algorithm designed to enhance the robustness of bipedal robotic walking across challenging terrains with restricted footholds. Traditional one-step preview planning struggles to maintain stability when stepping areas are severely limited, such as with random stepping stones. In this work, we developed a discrete-time Model Predictive Control (MPC) based on the step-to-step discrete evolution of the Divergent Component of Motion (DCM) of bipedal locomotion. This approach adaptively changes the step duration for optimal foot placement under constraints, thereby ensuring the robot's operational viability over multiple future steps and significantly improving its ability to navigate through environments with tight constraints on possible footholds. The effectiveness of this planning algorithm is demonstrated through simulations that include a variety of complex stepping-stone configurations and external perturbations. These tests underscore the algorithm's improved performance for navigating foothold-restricted environments, even with the presence of external disturbances.
Time-Varying ALIP Model and Robust Foot-Placement Control for Underactuated Bipedal Robot Walking on a Swaying Rigid Surface
Oct 24, 2022Controller design for bipedal walking on dynamic rigid surfaces (DRSes), which are rigid surfaces moving in the inertial frame (e.g., ships and airplanes), remains largely uninvestigated. This paper introduces a hierarchical control approach that achieves stable underactuated bipedal robot walking on a horizontally oscillating DRS. The highest layer of our approach is a real-time motion planner that generates desired global behaviors (i.e., the center of mass trajectories and footstep locations) by stabilizing a reduced-order robot model. One key novelty of this layer is the derivation of the reduced-order model by analytically extending the angular momentum based linear inverted pendulum (ALIP) model from stationary to horizontally moving surfaces. The other novelty is the development of a discrete-time foot-placement controller that exponentially stabilizes the hybrid, linear, time-varying ALIP model. The middle layer of the proposed approach is a walking pattern generator that translates the desired global behaviors into the robot's full-body reference trajectories for all directly actuated degrees of freedom. The lowest layer is an input-output linearizing controller that exponentially tracks those full-body reference trajectories based on the full-order, hybrid, nonlinear robot dynamics. Simulations of planar underactuated bipedal walking on a swaying DRS confirm that the proposed framework ensures the walking stability under different DRS motions and gait types.
Entangling Practice with Artistic and Educational Aims: Interviews on Technology-based Movement Sound Interactions
Sep 28, 2022Movement-sound interactive systems are at the interface of different artistic and educational practices. Within this multiplicity of uses, we examine common denominators in terms of learning, appropriation and relationship to technological systems. While these topics have been previously reported at NIME, we wanted to investigate how practitioners, coming from different perspectives, relate to these questions. We conducted interviews with 6 artists who are engaged in movementsound interactions: 1 performer, 1 performer/composer, 1 composer, 1 teacher/composer, 1 dancer/teacher, 1 dancer. Through a thematic analysis of the transcripts we identified three main themes related to (1) the mediating role of technological tools (2) usability and normativity, and (3) learning and practice. These results provide ground for discussion about the design and study of movement-sound interactive systems.
Resolved Motion Control for 3D Underactuated Bipedal Walking using Linear Inverted Pendulum Dynamics and Neural Adaptation
Aug 02, 2022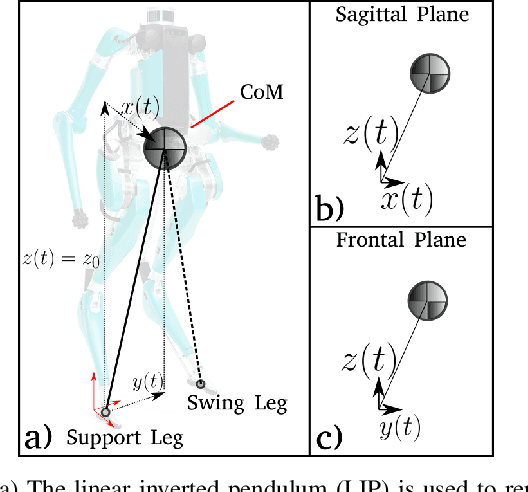
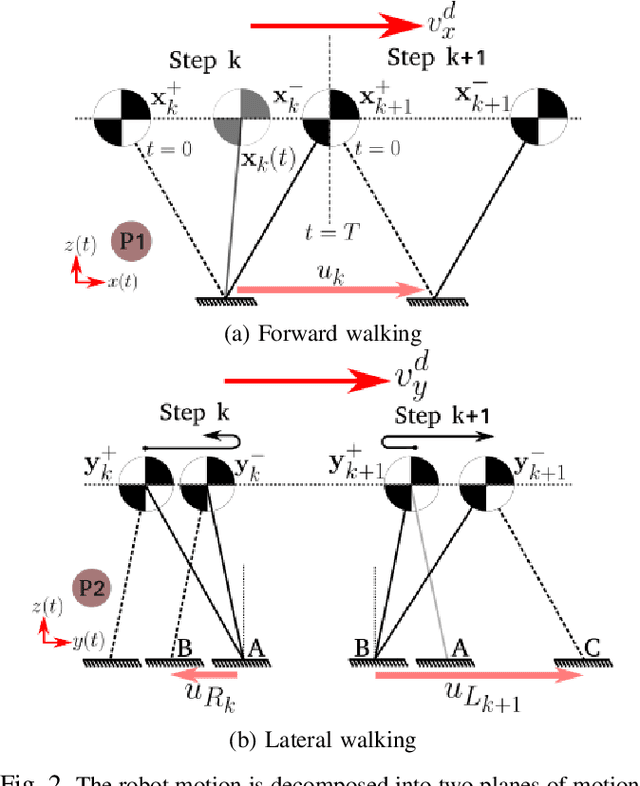
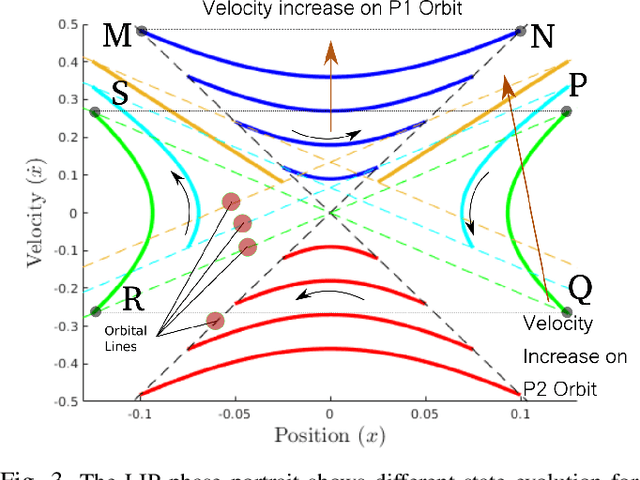
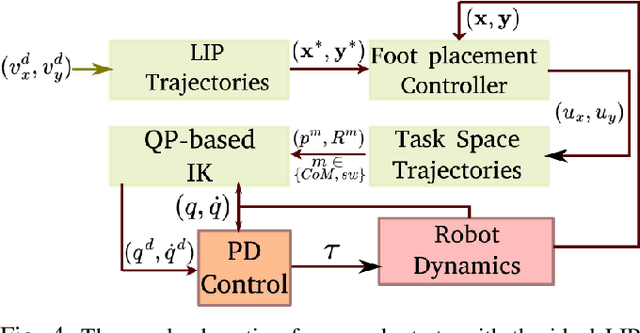
We present a framework to generate periodic trajectory references for a 3D under-actuated bipedal robot, using a linear inverted pendulum (LIP) based controller with adaptive neural regulation. We use the LIP template model to estimate the robot's center of mass (CoM) position and velocity at the end of the current step, and formulate a discrete controller that determines the next footstep location to achieve a desired walking profile. This controller is equipped on the frontal plane with a Neural-Network-based adaptive term that reduces the model mismatch between the template and physical robot that particularly affects the lateral motion. Then, the foot placement location computed for the LIP model is used to generate task space trajectories (CoM and swing foot trajectories) for the actual robot to realize stable walking. We use a fast, real-time QP-based inverse kinematics algorithm that produces joint references from the task space trajectories, which makes the formulation independent of the knowledge of the robot dynamics. Finally, we implemented and evaluated the proposed approach in simulation and hardware experiments with a Digit robot obtaining stable periodic locomotion for both cases.