 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCineMaster: A 3D-Aware and Controllable Framework for Cinematic Text-to-Video Generation
Feb 12, 2025In this work, we present CineMaster, a novel framework for 3D-aware and controllable text-to-video generation. Our goal is to empower users with comparable controllability as professional film directors: precise placement of objects within the scene, flexible manipulation of both objects and camera in 3D space, and intuitive layout control over the rendered frames. To achieve this, CineMaster operates in two stages. In the first stage, we design an interactive workflow that allows users to intuitively construct 3D-aware conditional signals by positioning object bounding boxes and defining camera movements within the 3D space. In the second stage, these control signals--comprising rendered depth maps, camera trajectories and object class labels--serve as the guidance for a text-to-video diffusion model, ensuring to generate the user-intended video content. Furthermore, to overcome the scarcity of in-the-wild datasets with 3D object motion and camera pose annotations, we carefully establish an automated data annotation pipeline that extracts 3D bounding boxes and camera trajectories from large-scale video data. Extensive qualitative and quantitative experiments demonstrate that CineMaster significantly outperforms existing methods and implements prominent 3D-aware text-to-video generation. Project page: https://cinemaster-dev.github.io/.
Baichuan-Omni-1.5 Technical Report
Jan 26, 2025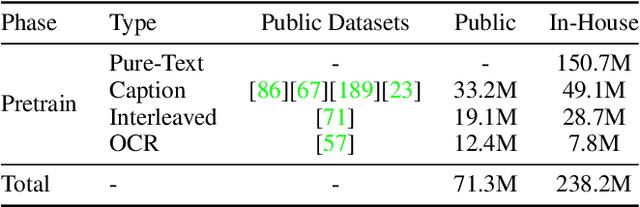
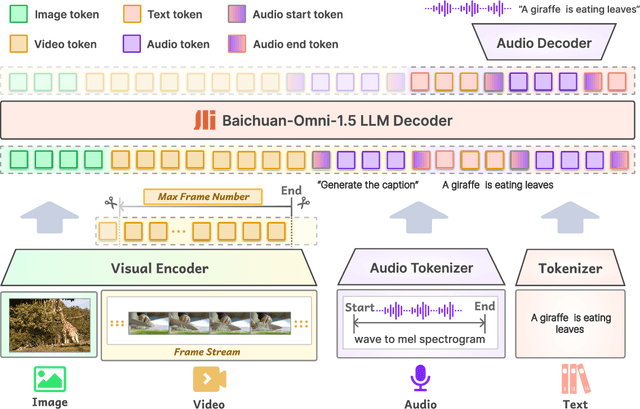
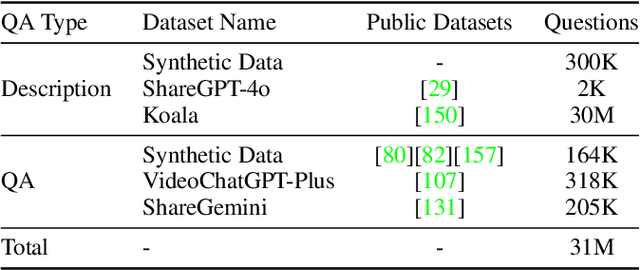
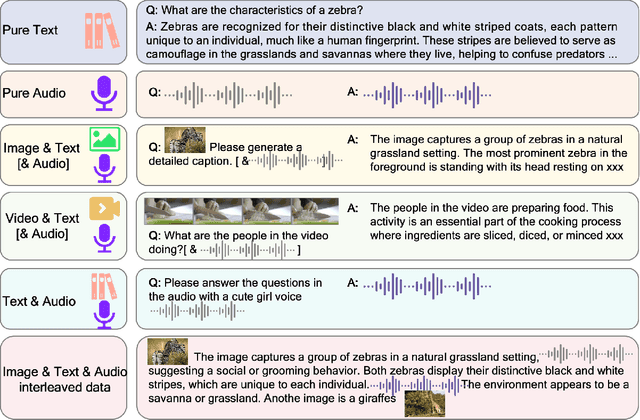
We introduce Baichuan-Omni-1.5, an omni-modal model that not only has omni-modal understanding capabilities but also provides end-to-end audio generation capabilities. To achieve fluent and high-quality interaction across modalities without compromising the capabilities of any modality, we prioritized optimizing three key aspects. First, we establish a comprehensive data cleaning and synthesis pipeline for multimodal data, obtaining about 500B high-quality data (text, audio, and vision). Second, an audio-tokenizer (Baichuan-Audio-Tokenizer) has been designed to capture both semantic and acoustic information from audio, enabling seamless integration and enhanced compatibility with MLLM. Lastly, we designed a multi-stage training strategy that progressively integrates multimodal alignment and multitask fine-tuning, ensuring effective synergy across all modalities. Baichuan-Omni-1.5 leads contemporary models (including GPT4o-mini and MiniCPM-o 2.6) in terms of comprehensive omni-modal capabilities. Notably, it achieves results comparable to leading models such as Qwen2-VL-72B across various multimodal medical benchmarks.
ReNeg: Learning Negative Embedding with Reward Guidance
Dec 27, 2024In text-to-image (T2I) generation applications, negative embeddings have proven to be a simple yet effective approach for enhancing generation quality. Typically, these negative embeddings are derived from user-defined negative prompts, which, while being functional, are not necessarily optimal. In this paper, we introduce ReNeg, an end-to-end method designed to learn improved Negative embeddings guided by a Reward model. We employ a reward feedback learning framework and integrate classifier-free guidance (CFG) into the training process, which was previously utilized only during inference, thus enabling the effective learning of negative embeddings. We also propose two strategies for learning both global and per-sample negative embeddings. Extensive experiments show that the learned negative embedding significantly outperforms null-text and handcrafted counterparts, achieving substantial improvements in human preference alignment. Additionally, the negative embedding learned within the same text embedding space exhibits strong generalization capabilities. For example, using the same CLIP text encoder, the negative embedding learned on SD1.5 can be seamlessly transferred to text-to-image or even text-to-video models such as ControlNet, ZeroScope, and VideoCrafter2, resulting in consistent performance improvements across the board.
TINQ: Temporal Inconsistency Guided Blind Video Quality Assessment
Dec 25, 2024Blind video quality assessment (BVQA) has been actively researched for user-generated content (UGC) videos. Recently, super-resolution (SR) techniques have been widely applied in UGC. Therefore, an effective BVQA method for both UGC and SR scenarios is essential. Temporal inconsistency, referring to irregularities between consecutive frames, is relevant to video quality. Current BVQA approaches typically model temporal relationships in UGC videos using statistics of motion information, but inconsistencies remain unexplored. Additionally, different from temporal inconsistency in UGC videos, such inconsistency in SR videos is amplified due to upscaling algorithms. In this paper, we introduce the Temporal Inconsistency Guided Blind Video Quality Assessment (TINQ) metric, demonstrating that exploring temporal inconsistency is crucial for effective BVQA. Since temporal inconsistencies vary between UGC and SR videos, they are calculated in different ways. Based on this, a spatial module highlights inconsistent areas across consecutive frames at coarse and fine granularities. In addition, a temporal module aggregates features over time in two stages. The first stage employs a visual memory capacity block to adaptively segment the time dimension based on estimated complexity, while the second stage focuses on selecting key features. The stages work together through Consistency-aware Fusion Units to regress cross-time-scale video quality. Extensive experiments on UGC and SR video quality datasets show that our method outperforms existing state-of-the-art BVQA methods. Code is available at https://github.com/Lighting-YXLI/TINQ.
MoTrans: Customized Motion Transfer with Text-driven Video Diffusion Models
Dec 02, 2024



Existing pretrained text-to-video (T2V) models have demonstrated impressive abilities in generating realistic videos with basic motion or camera movement. However, these models exhibit significant limitations when generating intricate, human-centric motions. Current efforts primarily focus on fine-tuning models on a small set of videos containing a specific motion. They often fail to effectively decouple motion and the appearance in the limited reference videos, thereby weakening the modeling capability of motion patterns. To this end, we propose MoTrans, a customized motion transfer method enabling video generation of similar motion in new context. Specifically, we introduce a multimodal large language model (MLLM)-based recaptioner to expand the initial prompt to focus more on appearance and an appearance injection module to adapt appearance prior from video frames to the motion modeling process. These complementary multimodal representations from recaptioned prompt and video frames promote the modeling of appearance and facilitate the decoupling of appearance and motion. In addition, we devise a motion-specific embedding for further enhancing the modeling of the specific motion. Experimental results demonstrate that our method effectively learns specific motion pattern from singular or multiple reference videos, performing favorably against existing methods in customized video generation.
OASIS: Open Agent Social Interaction Simulations with One Million Agents
Nov 26, 2024



There has been a growing interest in enhancing rule-based agent-based models (ABMs) for social media platforms (i.e., X, Reddit) with more realistic large language model (LLM) agents, thereby allowing for a more nuanced study of complex systems. As a result, several LLM-based ABMs have been proposed in the past year. While they hold promise, each simulator is specifically designed to study a particular scenario, making it time-consuming and resource-intensive to explore other phenomena using the same ABM. Additionally, these models simulate only a limited number of agents, whereas real-world social media platforms involve millions of users. To this end, we propose OASIS, a generalizable and scalable social media simulator. OASIS is designed based on real-world social media platforms, incorporating dynamically updated environments (i.e., dynamic social networks and post information), diverse action spaces (i.e., following, commenting), and recommendation systems (i.e., interest-based and hot-score-based). Additionally, OASIS supports large-scale user simulations, capable of modeling up to one million users. With these features, OASIS can be easily extended to different social media platforms to study large-scale group phenomena and behaviors. We replicate various social phenomena, including information spreading, group polarization, and herd effects across X and Reddit platforms. Moreover, we provide observations of social phenomena at different agent group scales. We observe that the larger agent group scale leads to more enhanced group dynamics and more diverse and helpful agents' opinions. These findings demonstrate OASIS's potential as a powerful tool for studying complex systems in digital environments.
DreamMix: Decoupling Object Attributes for Enhanced Editability in Customized Image Inpainting
Nov 26, 2024Subject-driven image inpainting has emerged as a popular task in image editing alongside recent advancements in diffusion models. Previous methods primarily focus on identity preservation but struggle to maintain the editability of inserted objects. In response, this paper introduces DreamMix, a diffusion-based generative model adept at inserting target objects into given scenes at user-specified locations while concurrently enabling arbitrary text-driven modifications to their attributes. In particular, we leverage advanced foundational inpainting models and introduce a disentangled local-global inpainting framework to balance precise local object insertion with effective global visual coherence. Additionally, we propose an Attribute Decoupling Mechanism (ADM) and a Textual Attribute Substitution (TAS) module to improve the diversity and discriminative capability of the text-based attribute guidance, respectively. Extensive experiments demonstrate that DreamMix effectively balances identity preservation and attribute editability across various application scenarios, including object insertion, attribute editing, and small object inpainting. Our code is publicly available at https://github.com/mycfhs/DreamMix.
OASIS: Open Agents Social Interaction Simulations on One Million Agents
Nov 21, 2024There has been a growing interest in enhancing rule-based agent-based models (ABMs) for social media platforms (i.e., X, Reddit) with more realistic large language model (LLM) agents, thereby allowing for a more nuanced study of complex systems. As a result, several LLM-based ABMs have been proposed in the past year. While they hold promise, each simulator is specifically designed to study a particular scenario, making it time-consuming and resource-intensive to explore other phenomena using the same ABM. Additionally, these models simulate only a limited number of agents, whereas real-world social media platforms involve millions of users. To this end, we propose OASIS, a generalizable and scalable social media simulator. OASIS is designed based on real-world social media platforms, incorporating dynamically updated environments (i.e., dynamic social networks and post information), diverse action spaces (i.e., following, commenting), and recommendation systems (i.e., interest-based and hot-score-based). Additionally, OASIS supports large-scale user simulations, capable of modeling up to one million users. With these features, OASIS can be easily extended to different social media platforms to study large-scale group phenomena and behaviors. We replicate various social phenomena, including information spreading, group polarization, and herd effects across X and Reddit platforms. Moreover, we provide observations of social phenomena at different agent group scales. We observe that the larger agent group scale leads to more enhanced group dynamics and more diverse and helpful agents' opinions. These findings demonstrate OASIS's potential as a powerful tool for studying complex systems in digital environments.
SHERL: Synthesizing High Accuracy and Efficient Memory for Resource-Limited Transfer Learning
Jul 10, 2024



Parameter-efficient transfer learning (PETL) has emerged as a flourishing research field for adapting large pre-trained models to downstream tasks, greatly reducing trainable parameters while grappling with memory challenges during fine-tuning. To address it, memory-efficient series (METL) avoid backpropagating gradients through the large backbone. However, they compromise by exclusively relying on frozen intermediate outputs and limiting the exhaustive exploration of prior knowledge from pre-trained models. Moreover, the dependency and redundancy between cross-layer features are frequently overlooked, thereby submerging more discriminative representations and causing an inherent performance gap (vs. conventional PETL methods). Hence, we propose an innovative METL strategy called SHERL for resource-limited scenarios to decouple the entire adaptation into two successive and complementary processes. In the early route, intermediate outputs are consolidated via an anti-redundancy operation, enhancing their compatibility for subsequent interactions; thereby in the late route, utilizing minimal late pre-trained layers could alleviate the peak demand on memory overhead and regulate these fairly flexible features into more adaptive and powerful representations for new domains. Extensive ablations on vision-and-language and language-only tasks show that SHERL combines the strengths of both parameter and memory-efficient techniques, performing on-par or better across diverse architectures with lower memory during fine-tuning. Our code is publicly available at: https://github.com/Paranioar/SHERL.
EvaGaussians: Event Stream Assisted Gaussian Splatting from Blurry Images
May 29, 2024



3D Gaussian Splatting (3D-GS) has demonstrated exceptional capabilities in 3D scene reconstruction and novel view synthesis. However, its training heavily depends on high-quality, sharp images and accurate camera poses. Fulfilling these requirements can be challenging in non-ideal real-world scenarios, where motion-blurred images are commonly encountered in high-speed moving cameras or low-light environments that require long exposure times. To address these challenges, we introduce Event Stream Assisted Gaussian Splatting (EvaGaussians), a novel approach that integrates event streams captured by an event camera to assist in reconstructing high-quality 3D-GS from blurry images. Capitalizing on the high temporal resolution and dynamic range offered by the event camera, we leverage the event streams to explicitly model the formation process of motion-blurred images and guide the deblurring reconstruction of 3D-GS. By jointly optimizing the 3D-GS parameters and recovering camera motion trajectories during the exposure time, our method can robustly facilitate the acquisition of high-fidelity novel views with intricate texture details. We comprehensively evaluated our method and compared it with previous state-of-the-art deblurring rendering methods. Both qualitative and quantitative comparisons demonstrate that our method surpasses existing techniques in restoring fine details from blurry images and producing high-fidelity novel views.