 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEntity-Graph Enhanced Cross-Modal Pretraining for Instance-level Product Retrieval
Jun 17, 2022
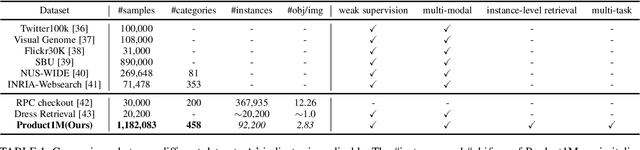
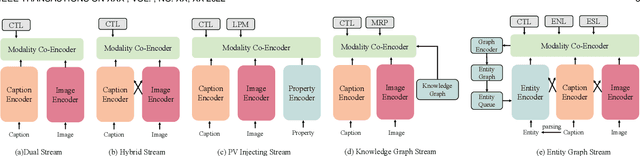

Our goal in this research is to study a more realistic environment in which we can conduct weakly-supervised multi-modal instance-level product retrieval for fine-grained product categories. We first contribute the Product1M datasets, and define two real practical instance-level retrieval tasks to enable the evaluations on the price comparison and personalized recommendations. For both instance-level tasks, how to accurately pinpoint the product target mentioned in the visual-linguistic data and effectively decrease the influence of irrelevant contents is quite challenging. To address this, we exploit to train a more effective cross-modal pertaining model which is adaptively capable of incorporating key concept information from the multi-modal data, by using an entity graph whose node and edge respectively denote the entity and the similarity relation between entities. Specifically, a novel Entity-Graph Enhanced Cross-Modal Pretraining (EGE-CMP) model is proposed for instance-level commodity retrieval, that explicitly injects entity knowledge in both node-based and subgraph-based ways into the multi-modal networks via a self-supervised hybrid-stream transformer, which could reduce the confusion between different object contents, thereby effectively guiding the network to focus on entities with real semantic. Experimental results well verify the efficacy and generalizability of our EGE-CMP, outperforming several SOTA cross-modal baselines like CLIP, UNITER and CAPTURE.
Cross-modal Clinical Graph Transformer for Ophthalmic Report Generation
Jun 04, 2022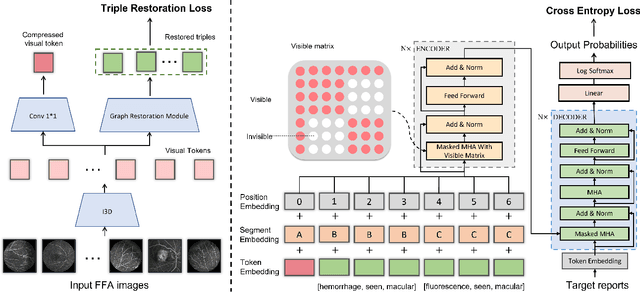
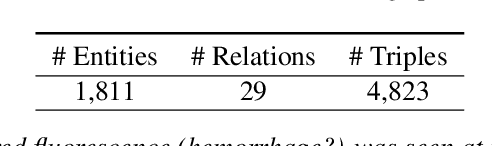
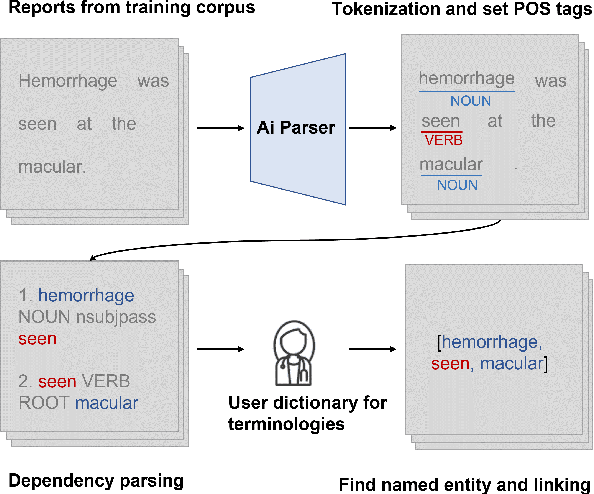
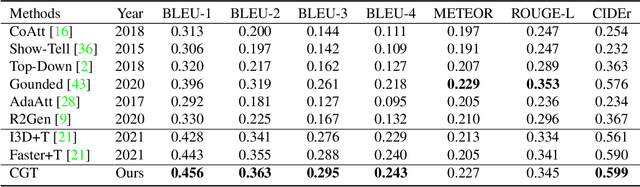
Automatic generation of ophthalmic reports using data-driven neural networks has great potential in clinical practice. When writing a report, ophthalmologists make inferences with prior clinical knowledge. This knowledge has been neglected in prior medical report generation methods. To endow models with the capability of incorporating expert knowledge, we propose a Cross-modal clinical Graph Transformer (CGT) for ophthalmic report generation (ORG), in which clinical relation triples are injected into the visual features as prior knowledge to drive the decoding procedure. However, two major common Knowledge Noise (KN) issues may affect models' effectiveness. 1) Existing general biomedical knowledge bases such as the UMLS may not align meaningfully to the specific context and language of the report, limiting their utility for knowledge injection. 2) Incorporating too much knowledge may divert the visual features from their correct meaning. To overcome these limitations, we design an automatic information extraction scheme based on natural language processing to obtain clinical entities and relations directly from in-domain training reports. Given a set of ophthalmic images, our CGT first restores a sub-graph from the clinical graph and injects the restored triples into visual features. Then visible matrix is employed during the encoding procedure to limit the impact of knowledge. Finally, reports are predicted by the encoded cross-modal features via a Transformer decoder. Extensive experiments on the large-scale FFA-IR benchmark demonstrate that the proposed CGT is able to outperform previous benchmark methods and achieve state-of-the-art performances.
ADAPT: Vision-Language Navigation with Modality-Aligned Action Prompts
May 31, 2022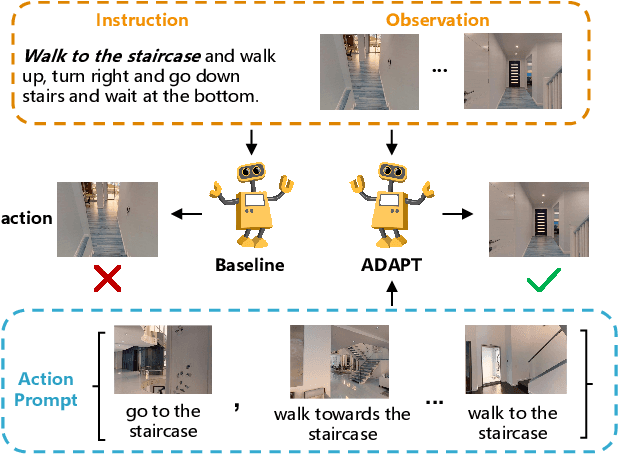

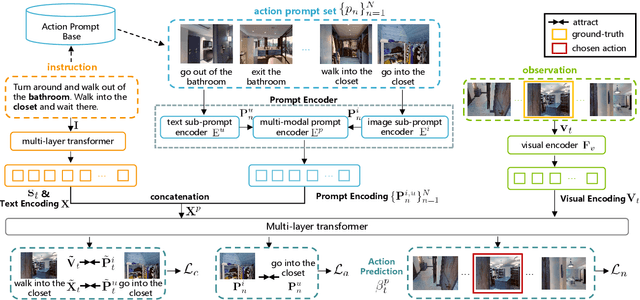
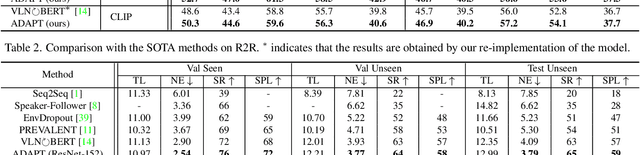
Vision-Language Navigation (VLN) is a challenging task that requires an embodied agent to perform action-level modality alignment, i.e., make instruction-asked actions sequentially in complex visual environments. Most existing VLN agents learn the instruction-path data directly and cannot sufficiently explore action-level alignment knowledge inside the multi-modal inputs. In this paper, we propose modAlity-aligneD Action PrompTs (ADAPT), which provides the VLN agent with action prompts to enable the explicit learning of action-level modality alignment to pursue successful navigation. Specifically, an action prompt is defined as a modality-aligned pair of an image sub-prompt and a text sub-prompt, where the former is a single-view observation and the latter is a phrase like ''walk past the chair''. When starting navigation, the instruction-related action prompt set is retrieved from a pre-built action prompt base and passed through a prompt encoder to obtain the prompt feature. Then the prompt feature is concatenated with the original instruction feature and fed to a multi-layer transformer for action prediction. To collect high-quality action prompts into the prompt base, we use the Contrastive Language-Image Pretraining (CLIP) model which has powerful cross-modality alignment ability. A modality alignment loss and a sequential consistency loss are further introduced to enhance the alignment of the action prompt and enforce the agent to focus on the related prompt sequentially. Experimental results on both R2R and RxR show the superiority of ADAPT over state-of-the-art methods.
Benchmarking the Robustness of LiDAR-Camera Fusion for 3D Object Detection
May 30, 2022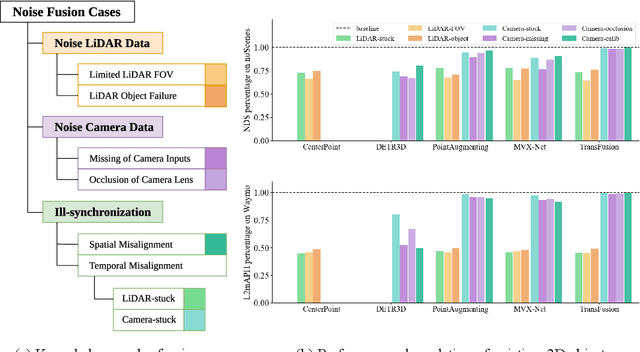
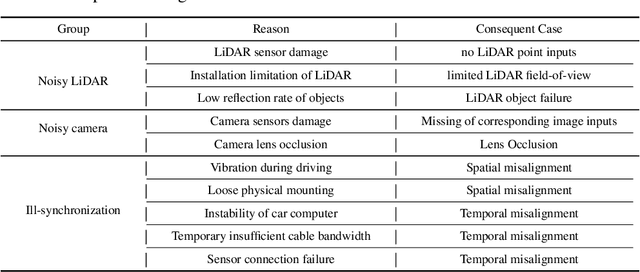
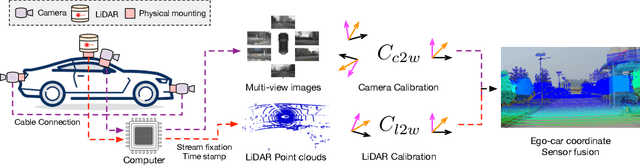
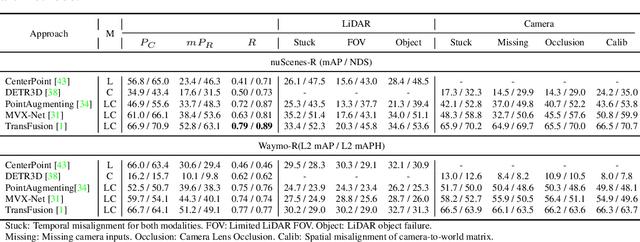
There are two critical sensors for 3D perception in autonomous driving, the camera and the LiDAR. The camera provides rich semantic information such as color, texture, and the LiDAR reflects the 3D shape and locations of surrounding objects. People discover that fusing these two modalities can significantly boost the performance of 3D perception models as each modality has complementary information to the other. However, we observe that current datasets are captured from expensive vehicles that are explicitly designed for data collection purposes, and cannot truly reflect the realistic data distribution due to various reasons. To this end, we collect a series of real-world cases with noisy data distribution, and systematically formulate a robustness benchmark toolkit, that simulates these cases on any clean autonomous driving datasets. We showcase the effectiveness of our toolkit by establishing the robustness benchmark on two widely-adopted autonomous driving datasets, nuScenes and Waymo, then, to the best of our knowledge, holistically benchmark the state-of-the-art fusion methods for the first time. We observe that: i) most fusion methods, when solely developed on these data, tend to fail inevitably when there is a disruption to the LiDAR input; ii) the improvement of the camera input is significantly inferior to the LiDAR one. We further propose an efficient robust training strategy to improve the robustness of the current fusion method. The benchmark and code are available at https://github.com/kcyu2014/lidar-camera-robust-benchmark
ZeroGen$^+$: Self-Guided High-Quality Data Generation in Efficient Zero-Shot Learning
May 25, 2022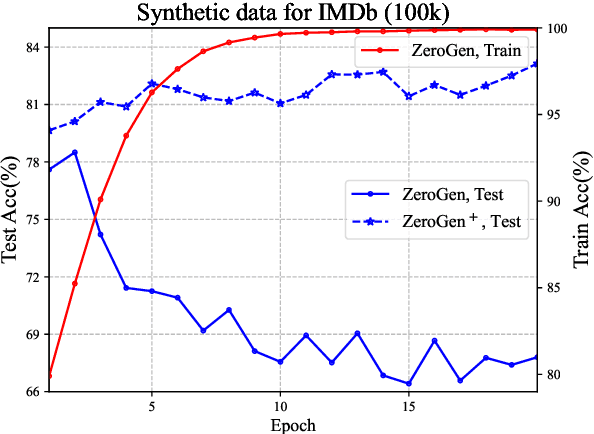
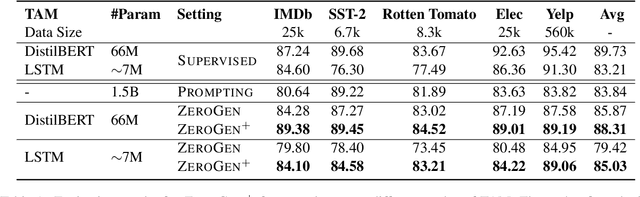
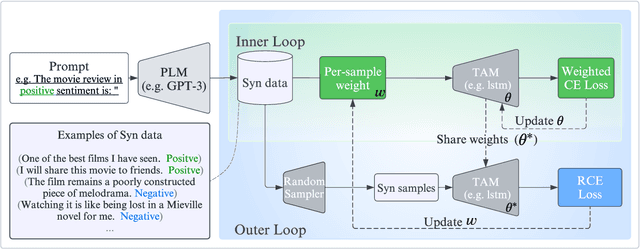
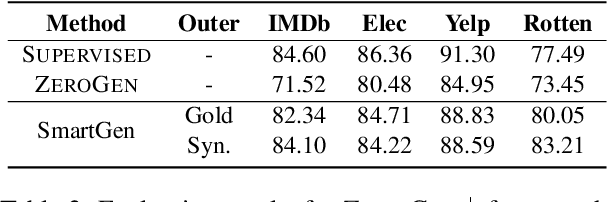
Nowadays, owing to the superior capacity of the large pre-trained language models (PLM), the PLM-based zero-shot learning has shown promising performances on various natural language processing tasks. There are emerging interests in further exploring the zero-shot learning potential of PLMs. Among them, ZeroGen attempts to purely use PLM to generate data and train a tiny model without relying on any task-specific annotation. Despite its remarkable results, we observe that the synthesized data from PLM contains a significant portion of samples with low quality, overfitting on such data greatly hampers the performance of the trained model and makes it unreliable for deployment.Since no gold data is accessible in zero-shot scenario, it is hard to perform model/data selection to prevent overfitting to the low-quality data. To address this problem, we propose a noise-robust bi-level re-weighting framework which is able to learn the per-sample weights measuring the data quality without requiring any gold data. With the learnt weights, clean subsets of different sizes can then be sampled to train the task model. We theoretically and empirically verify our method is able to construct synthetic dataset with good quality. Our method yeilds a 7.1% relative improvement than ZeroGen on average accuracy across five different established text classification tasks.
Knowledge Distillation via the Target-aware Transformer
May 22, 2022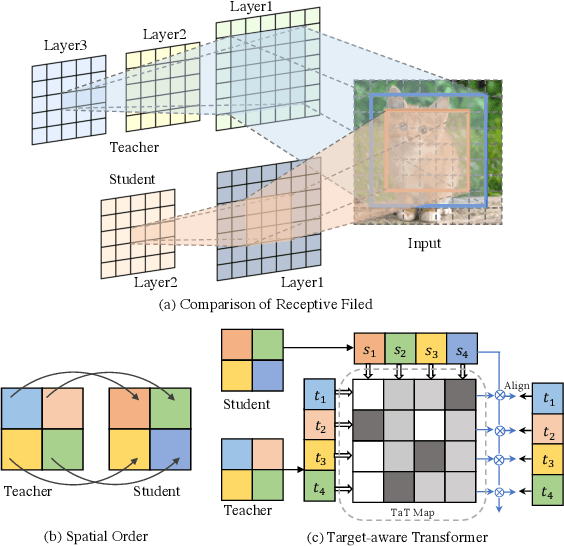
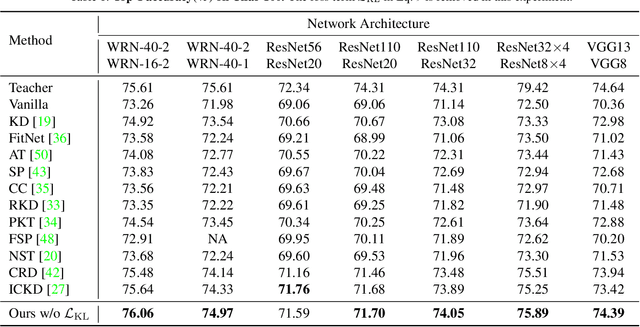
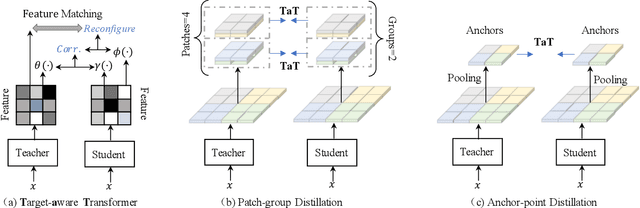

Knowledge distillation becomes a de facto standard to improve the performance of small neural networks. Most of the previous works propose to regress the representational features from the teacher to the student in a one-to-one spatial matching fashion. However, people tend to overlook the fact that, due to the architecture differences, the semantic information on the same spatial location usually vary. This greatly undermines the underlying assumption of the one-to-one distillation approach. To this end, we propose a novel one-to-all spatial matching knowledge distillation approach. Specifically, we allow each pixel of the teacher feature to be distilled to all spatial locations of the student features given its similarity, which is generated from a target-aware transformer. Our approach surpasses the state-of-the-art methods by a significant margin on various computer vision benchmarks, such as ImageNet, Pascal VOC and COCOStuff10k. Code will be released soon.
LogicSolver: Towards Interpretable Math Word Problem Solving with Logical Prompt-enhanced Learning
May 17, 2022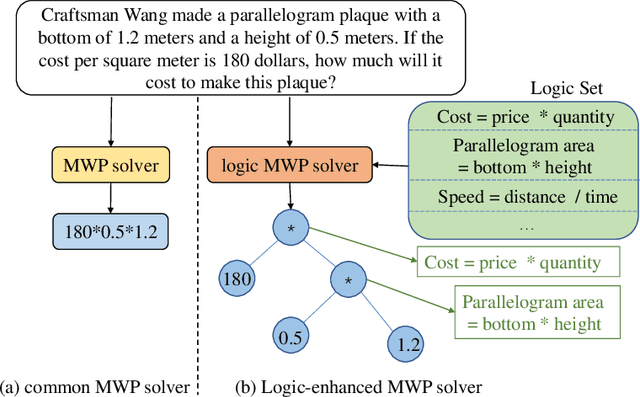
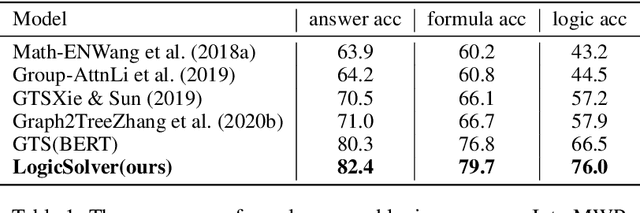
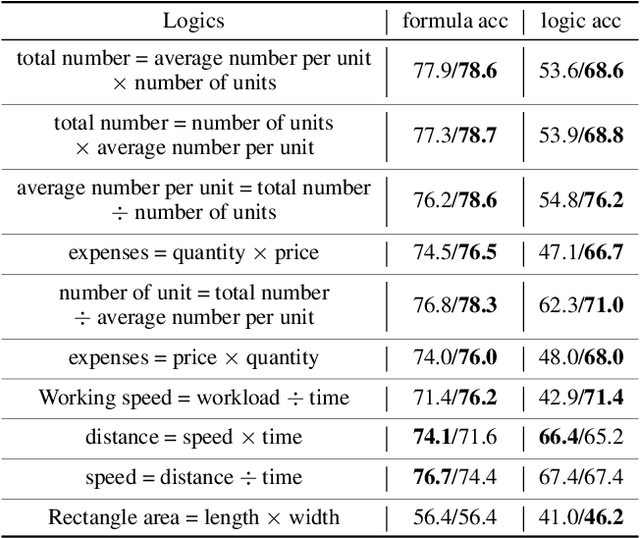
Recently, deep learning models have made great progress in MWP solving on answer accuracy. However, they are uninterpretable since they mainly rely on shallow heuristics to achieve high performance without understanding and reasoning the grounded math logic. To address this issue and make a step towards interpretable MWP solving, we first construct a high-quality MWP dataset named InterMWP which consists of 11,495 MWPs and annotates interpretable logical formulas based on algebraic knowledge as the grounded linguistic logic of each solution equation. Different from existing MWP datasets, our InterMWP benchmark asks for a solver to not only output the solution expressions but also predict the corresponding logical formulas. We further propose a novel approach with logical prompt and interpretation generation, called LogicSolver. For each MWP, our LogicSolver first retrieves some highly-correlated algebraic knowledge and then passes them to the backbone model as prompts to improve the semantic representations of MWPs. With these improved semantic representations, our LogicSolver generates corresponding solution expressions and interpretable knowledge formulas in accord with the generated solution expressions, simultaneously. Experimental results show that our LogicSolver has stronger logical formula-based interpretability than baselines while achieving higher answer accuracy with the help of logical prompts, simultaneously.
Unbiased Math Word Problems Benchmark for Mitigating Solving Bias
May 17, 2022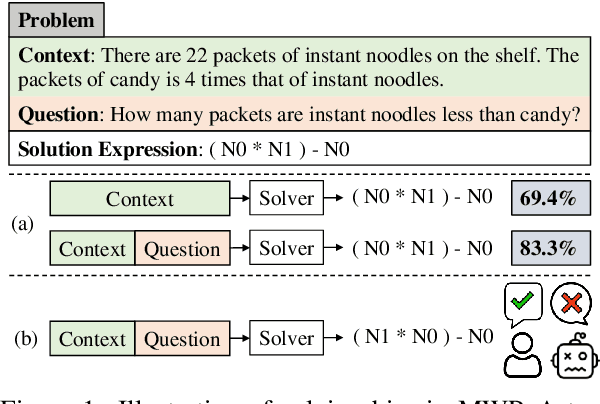
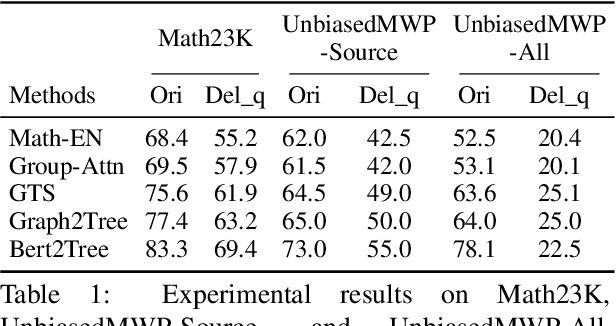
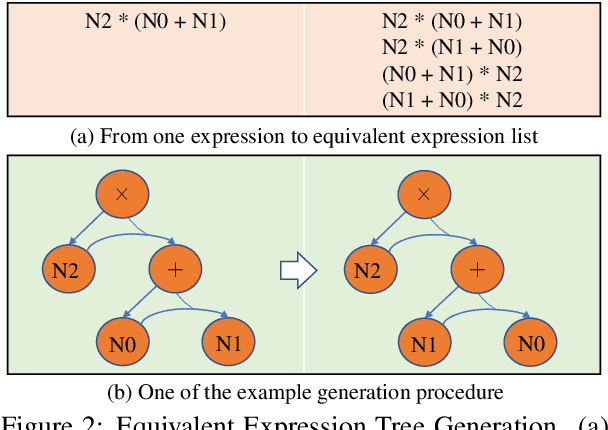
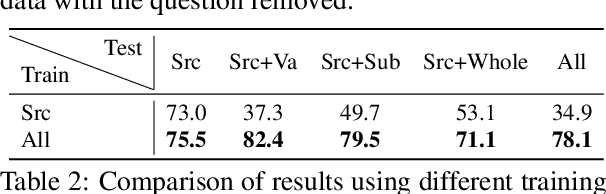
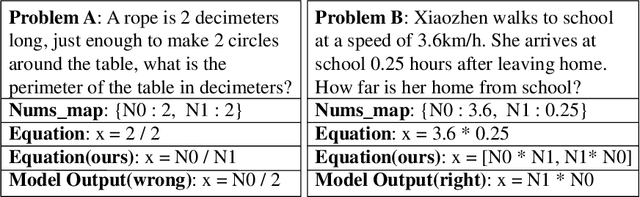
In this paper, we revisit the solving bias when evaluating models on current Math Word Problem (MWP) benchmarks. However, current solvers exist solving bias which consists of data bias and learning bias due to biased dataset and improper training strategy. Our experiments verify MWP solvers are easy to be biased by the biased training datasets which do not cover diverse questions for each problem narrative of all MWPs, thus a solver can only learn shallow heuristics rather than deep semantics for understanding problems. Besides, an MWP can be naturally solved by multiple equivalent equations while current datasets take only one of the equivalent equations as ground truth, forcing the model to match the labeled ground truth and ignoring other equivalent equations. Here, we first introduce a novel MWP dataset named UnbiasedMWP which is constructed by varying the grounded expressions in our collected data and annotating them with corresponding multiple new questions manually. Then, to further mitigate learning bias, we propose a Dynamic Target Selection (DTS) Strategy to dynamically select more suitable target expressions according to the longest prefix match between the current model output and candidate equivalent equations which are obtained by applying commutative law during training. The results show that our UnbiasedMWP has significantly fewer biases than its original data and other datasets, posing a promising benchmark for fairly evaluating the solvers' reasoning skills rather than matching nearest neighbors. And the solvers trained with our DTS achieve higher accuracies on multiple MWP benchmarks. The source code is available at https://github.com/yangzhch6/UnbiasedMWP.
Continual Object Detection via Prototypical Task Correlation Guided Gating Mechanism
May 06, 2022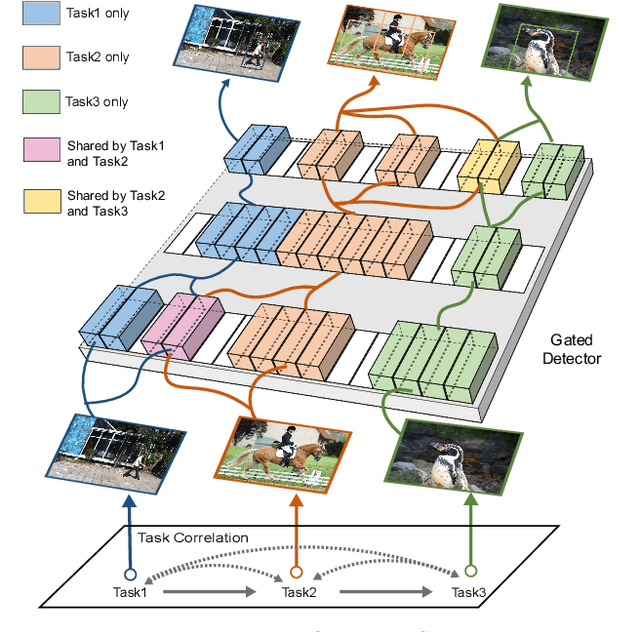
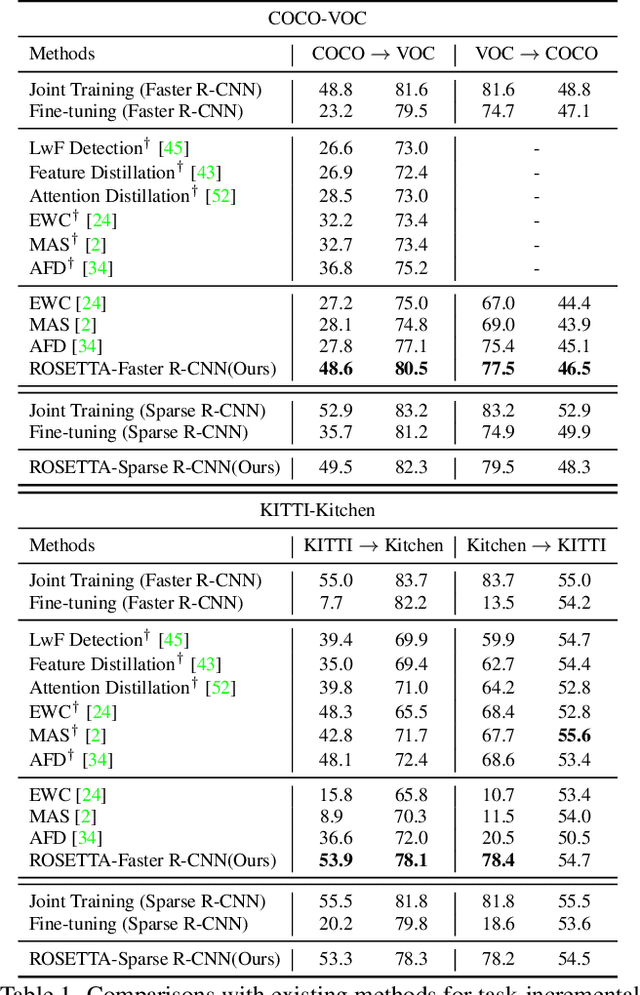
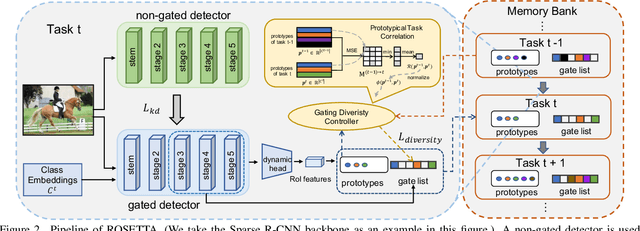
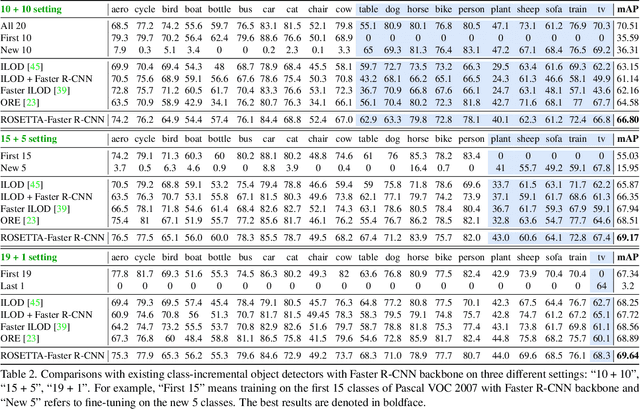
Continual learning is a challenging real-world problem for constructing a mature AI system when data are provided in a streaming fashion. Despite recent progress in continual classification, the researches of continual object detection are impeded by the diverse sizes and numbers of objects in each image. Different from previous works that tune the whole network for all tasks, in this work, we present a simple and flexible framework for continual object detection via pRotOtypical taSk corrElaTion guided gaTing mechAnism (ROSETTA). Concretely, a unified framework is shared by all tasks while task-aware gates are introduced to automatically select sub-models for specific tasks. In this way, various knowledge can be successively memorized by storing their corresponding sub-model weights in this system. To make ROSETTA automatically determine which experience is available and useful, a prototypical task correlation guided Gating Diversity Controller(GDC) is introduced to adaptively adjust the diversity of gates for the new task based on class-specific prototypes. GDC module computes class-to-class correlation matrix to depict the cross-task correlation, and hereby activates more exclusive gates for the new task if a significant domain gap is observed. Comprehensive experiments on COCO-VOC, KITTI-Kitchen, class-incremental detection on VOC and sequential learning of four tasks show that ROSETTA yields state-of-the-art performance on both task-based and class-based continual object detection.
"My nose is running.""Are you also coughing?": Building A Medical Diagnosis Agent with Interpretable Inquiry Logics
May 02, 2022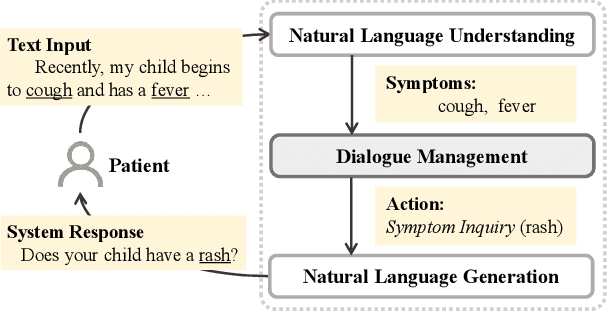
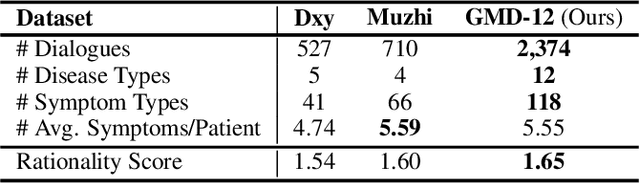
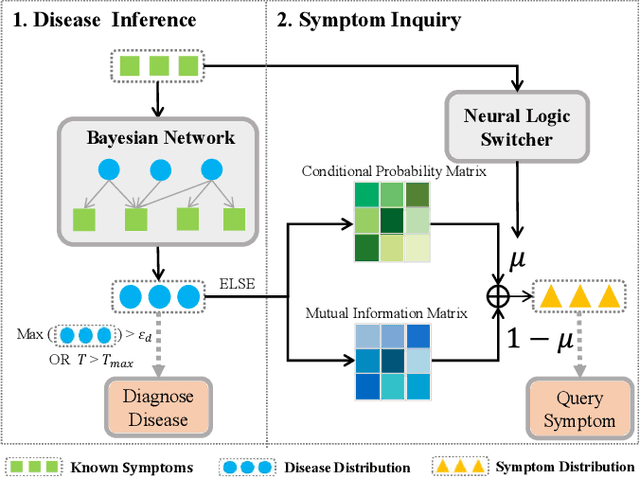
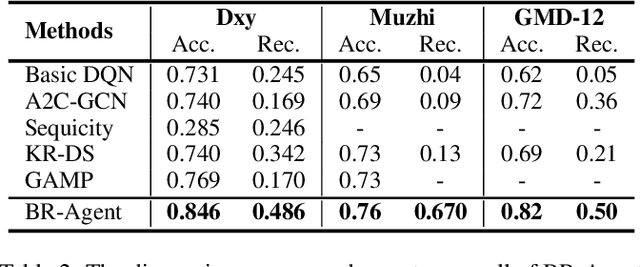
With the rise of telemedicine, the task of developing Dialogue Systems for Medical Diagnosis (DSMD) has received much attention in recent years. Different from early researches that needed to rely on extra human resources and expertise to help construct the system, recent researches focused on how to build DSMD in a purely data-driven manner. However, the previous data-driven DSMD methods largely overlooked the system interpretability, which is critical for a medical application, and they also suffered from the data sparsity issue at the same time. In this paper, we explore how to bring interpretability to data-driven DSMD. Specifically, we propose a more interpretable decision process to implement the dialogue manager of DSMD by reasonably mimicking real doctors' inquiry logics, and we devise a model with highly transparent components to conduct the inference. Moreover, we collect a new DSMD dataset, which has a much larger scale, more diverse patterns and is of higher quality than the existing ones. The experiments show that our method obtains 7.7%, 10.0%, 3.0% absolute improvement in diagnosis accuracy respectively on three datasets, demonstrating the effectiveness of its rational decision process and model design. Our codes and the GMD-12 dataset are available at https://github.com/lwgkzl/BR-Agent.