 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReasoning Curriculum: Bootstrapping Broad LLM Reasoning from Math
Oct 30, 2025Reinforcement learning (RL) can elicit strong reasoning in large language models (LLMs), yet most open efforts focus on math and code. We propose Reasoning Curriculum, a simple two-stage curriculum that first elicits reasoning skills in pretraining-aligned domains such as math, then adapts and refines these skills across other domains via joint RL. Stage 1 performs a brief cold start and then math-only RL with verifiable rewards to develop reasoning skills. Stage 2 runs joint RL on mixed-domain data to transfer and consolidate these skills. The curriculum is minimal and backbone-agnostic, requiring no specialized reward models beyond standard verifiability checks. Evaluated on Qwen3-4B and Llama-3.1-8B over a multi-domain suite, reasoning curriculum yields consistent gains. Ablations and a cognitive-skill analysis indicate that both stages are necessary and that math-first elicitation increases cognitive behaviors important for solving complex problems. Reasoning Curriculum provides a compact, easy-to-adopt recipe for general reasoning.
ToolLibGen: Scalable Automatic Tool Creation and Aggregation for LLM Reasoning
Oct 09, 2025



Large Language Models (LLMs) equipped with external tools have demonstrated enhanced performance on complex reasoning tasks. The widespread adoption of this tool-augmented reasoning is hindered by the scarcity of domain-specific tools. For instance, in domains such as physics question answering, suitable and specialized tools are often missing. Recent work has explored automating tool creation by extracting reusable functions from Chain-of-Thought (CoT) reasoning traces; however, these approaches face a critical scalability bottleneck. As the number of generated tools grows, storing them in an unstructured collection leads to significant retrieval challenges, including an expanding search space and ambiguity between function-related tools. To address this, we propose a systematic approach to automatically refactor an unstructured collection of tools into a structured tool library. Our system first generates discrete, task-specific tools and clusters them into semantically coherent topics. Within each cluster, we introduce a multi-agent framework to consolidate scattered functionalities: a code agent refactors code to extract shared logic and creates versatile, aggregated tools, while a reviewing agent ensures that these aggregated tools maintain the complete functional capabilities of the original set. This process transforms numerous question-specific tools into a smaller set of powerful, aggregated tools without loss of functionality. Experimental results demonstrate that our approach significantly improves tool retrieval accuracy and overall reasoning performance across multiple reasoning tasks. Furthermore, our method shows enhanced scalability compared with baselines as the number of question-specific increases.
WALT: Web Agents that Learn Tools
Oct 01, 2025Web agents promise to automate complex browser tasks, but current methods remain brittle -- relying on step-by-step UI interactions and heavy LLM reasoning that break under dynamic layouts and long horizons. Humans, by contrast, exploit website-provided functionality through high-level operations like search, filter, and sort. We introduce WALT (Web Agents that Learn Tools), a framework that reverse-engineers latent website functionality into reusable invocable tools. Rather than hypothesizing ad-hoc skills, WALT exposes robust implementations of automations already designed into websites -- spanning discovery (search, filter, sort), communication (post, comment, upvote), and content management (create, edit, delete). Tools abstract away low-level execution: instead of reasoning about how to click and type, agents simply call search(query) or create(listing). This shifts the computational burden from fragile step-by-step reasoning to reliable tool invocation. On VisualWebArena and WebArena, WALT achieves higher success with fewer steps and less LLM-dependent reasoning, establishing a robust and generalizable paradigm for browser automation.
SCUBA: Salesforce Computer Use Benchmark
Sep 30, 2025



We introduce SCUBA, a benchmark designed to evaluate computer-use agents on customer relationship management (CRM) workflows within the Salesforce platform. SCUBA contains 300 task instances derived from real user interviews, spanning three primary personas, platform administrators, sales representatives, and service agents. The tasks test a range of enterprise-critical abilities, including Enterprise Software UI navigation, data manipulation, workflow automation, information retrieval, and troubleshooting. To ensure realism, SCUBA operates in Salesforce sandbox environments with support for parallel execution and fine-grained evaluation metrics to capture milestone progress. We benchmark a diverse set of agents under both zero-shot and demonstration-augmented settings. We observed huge performance gaps in different agent design paradigms and gaps between the open-source model and the closed-source model. In the zero-shot setting, open-source model powered computer-use agents that have strong performance on related benchmarks like OSWorld only have less than 5\% success rate on SCUBA, while methods built on closed-source models can still have up to 39% task success rate. In the demonstration-augmented settings, task success rates can be improved to 50\% while simultaneously reducing time and costs by 13% and 16%, respectively. These findings highlight both the challenges of enterprise tasks automation and the promise of agentic solutions. By offering a realistic benchmark with interpretable evaluation, SCUBA aims to accelerate progress in building reliable computer-use agents for complex business software ecosystems.
LoCoBench: A Benchmark for Long-Context Large Language Models in Complex Software Engineering
Sep 11, 2025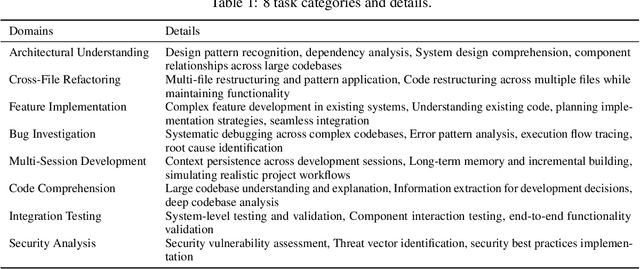
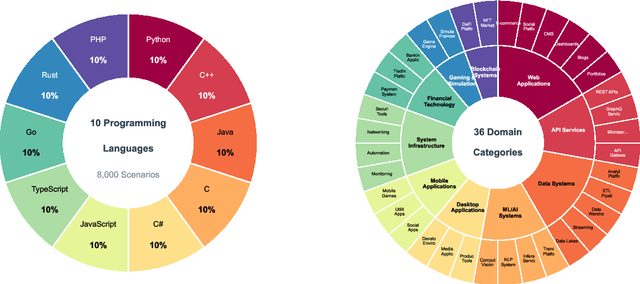
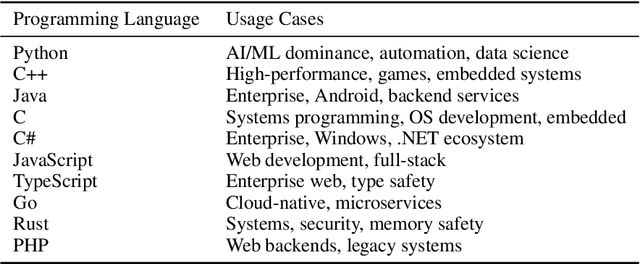
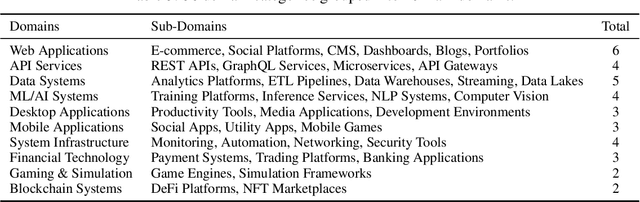
The emergence of long-context language models with context windows extending to millions of tokens has created new opportunities for sophisticated code understanding and software development evaluation. We propose LoCoBench, a comprehensive benchmark specifically designed to evaluate long-context LLMs in realistic, complex software development scenarios. Unlike existing code evaluation benchmarks that focus on single-function completion or short-context tasks, LoCoBench addresses the critical evaluation gap for long-context capabilities that require understanding entire codebases, reasoning across multiple files, and maintaining architectural consistency across large-scale software systems. Our benchmark provides 8,000 evaluation scenarios systematically generated across 10 programming languages, with context lengths spanning 10K to 1M tokens, a 100x variation that enables precise assessment of long-context performance degradation in realistic software development settings. LoCoBench introduces 8 task categories that capture essential long-context capabilities: architectural understanding, cross-file refactoring, multi-session development, bug investigation, feature implementation, code comprehension, integration testing, and security analysis. Through a 5-phase pipeline, we create diverse, high-quality scenarios that challenge LLMs to reason about complex codebases at unprecedented scale. We introduce a comprehensive evaluation framework with 17 metrics across 4 dimensions, including 8 new evaluation metrics, combined in a LoCoBench Score (LCBS). Our evaluation of state-of-the-art long-context models reveals substantial performance gaps, demonstrating that long-context understanding in complex software development represents a significant unsolved challenge that demands more attention. LoCoBench is released at: https://github.com/SalesforceAIResearch/LoCoBench.
Strefer: Empowering Video LLMs with Space-Time Referring and Reasoning via Synthetic Instruction Data
Sep 03, 2025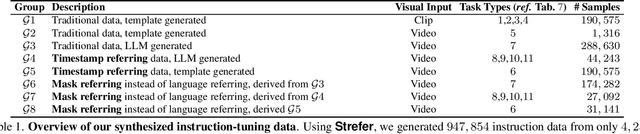
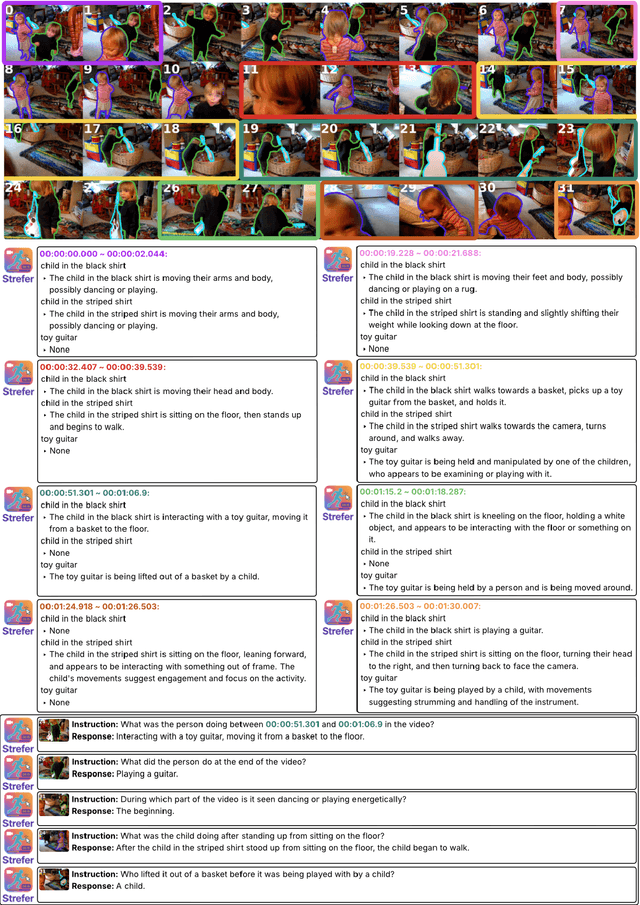
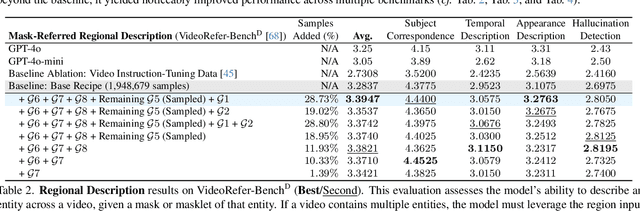
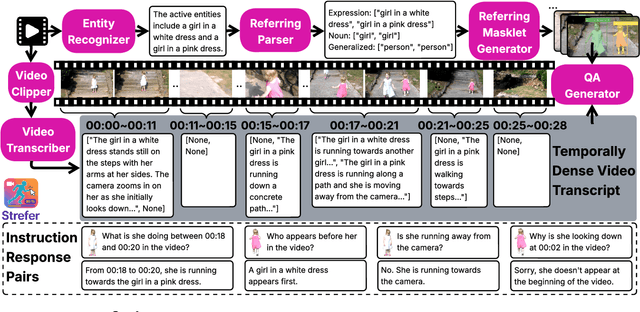
Next-generation AI companions must go beyond general video understanding to resolve spatial and temporal references in dynamic, real-world environments. Existing Video Large Language Models (Video LLMs), while capable of coarse-level comprehension, struggle with fine-grained, spatiotemporal reasoning, especially when user queries rely on time-based event references for temporal anchoring, or gestural cues for spatial anchoring to clarify object references and positions. To bridge this critical gap, we introduce Strefer, a synthetic instruction data generation framework designed to equip Video LLMs with spatiotemporal referring and reasoning capabilities. Strefer produces diverse instruction-tuning data using a data engine that pseudo-annotates temporally dense, fine-grained video metadata, capturing rich spatial and temporal information in a structured manner, including subjects, objects, their locations as masklets, and their action descriptions and timelines. Our approach enhances the ability of Video LLMs to interpret spatial and temporal references, fostering more versatile, space-time-aware reasoning essential for real-world AI companions. Without using proprietary models, costly human annotation, or the need to annotate large volumes of new videos, experimental evaluations show that models trained with data produced by Strefer outperform baselines on tasks requiring spatial and temporal disambiguation. Additionally, these models exhibit enhanced space-time-aware reasoning, establishing a new foundation for perceptually grounded, instruction-tuned Video LLMs.
MCP-Universe: Benchmarking Large Language Models with Real-World Model Context Protocol Servers
Aug 20, 2025



The Model Context Protocol has emerged as a transformative standard for connecting large language models to external data sources and tools, rapidly gaining adoption across major AI providers and development platforms. However, existing benchmarks are overly simplistic and fail to capture real application challenges such as long-horizon reasoning and large, unfamiliar tool spaces. To address this critical gap, we introduce MCP-Universe, the first comprehensive benchmark specifically designed to evaluate LLMs in realistic and hard tasks through interaction with real-world MCP servers. Our benchmark encompasses 6 core domains spanning 11 different MCP servers: Location Navigation, Repository Management, Financial Analysis, 3D Design, Browser Automation, and Web Searching. To ensure rigorous evaluation, we implement execution-based evaluators, including format evaluators for agent format compliance, static evaluators for time-invariant content matching, and dynamic evaluators that automatically retrieve real-time ground truth for temporally sensitive tasks. Through extensive evaluation of leading LLMs, we find that even SOTA models such as GPT-5 (43.72%), Grok-4 (33.33%) and Claude-4.0-Sonnet (29.44%) exhibit significant performance limitations. In addition, our benchmark poses a significant long-context challenge for LLM agents, as the number of input tokens increases rapidly with the number of interaction steps. Moreover, it introduces an unknown-tools challenge, as LLM agents often lack familiarity with the precise usage of the MCP servers. Notably, enterprise-level agents like Cursor cannot achieve better performance than standard ReAct frameworks. Beyond evaluation, we open-source our extensible evaluation framework with UI support, enabling researchers and practitioners to seamlessly integrate new agents and MCP servers while fostering innovation in the rapidly evolving MCP ecosystem.
CoAct-1: Computer-using Agents with Coding as Actions
Aug 05, 2025



Autonomous agents that operate computers via Graphical User Interfaces (GUIs) often struggle with efficiency and reliability on complex, long-horizon tasks. While augmenting these agents with planners can improve task decomposition, they remain constrained by the inherent limitations of performing all actions through GUI manipulation, leading to brittleness and inefficiency. In this work, we introduce a more robust and flexible paradigm: enabling agents to use coding as a enhanced action. We present CoAct-1, a novel multi-agent system that synergistically combines GUI-based control with direct programmatic execution. CoAct-1 features an Orchestrator that dynamically delegates subtasks to either a conventional GUI Operator or a specialized Programmer agent, which can write and execute Python or Bash scripts. This hybrid approach allows the agent to bypass inefficient GUI action sequences for tasks like file management and data processing, while still leveraging visual interaction when necessary. We evaluate our system on the challenging OSWorld benchmark, where CoAct-1 achieves a new state-of-the-art success rate of 60.76%, significantly outperforming prior methods. Furthermore, our approach dramatically improves efficiency, reducing the average number of steps required to complete a task to just 10.15, compared to 15 for leading GUI agents. Our results demonstrate that integrating coding as a core action provides a more powerful, efficient, and scalable path toward generalized computer automation.
UserBench: An Interactive Gym Environment for User-Centric Agents
Jul 29, 2025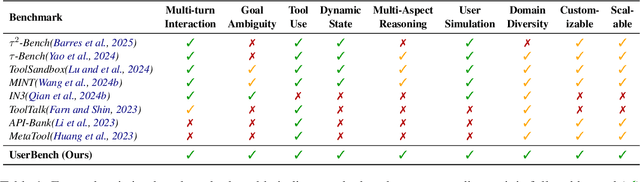


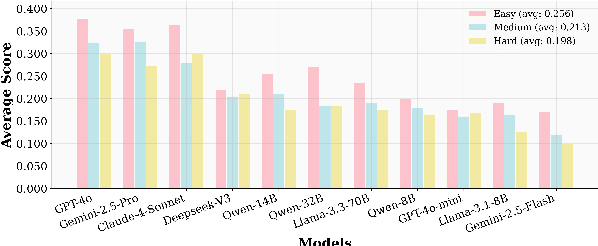
Large Language Models (LLMs)-based agents have made impressive progress in reasoning and tool use, enabling them to solve complex tasks. However, their ability to proactively collaborate with users, especially when goals are vague, evolving, or indirectly expressed, remains underexplored. To address this gap, we introduce UserBench, a user-centric benchmark designed to evaluate agents in multi-turn, preference-driven interactions. UserBench features simulated users who start with underspecified goals and reveal preferences incrementally, requiring agents to proactively clarify intent and make grounded decisions with tools. Our evaluation of leading open- and closed-source LLMs reveals a significant disconnect between task completion and user alignment. For instance, models provide answers that fully align with all user intents only 20% of the time on average, and even the most advanced models uncover fewer than 30% of all user preferences through active interaction. These results highlight the challenges of building agents that are not just capable task executors, but true collaborative partners. UserBench offers an interactive environment to measure and advance this critical capability.
CRMArena-Pro: Holistic Assessment of LLM Agents Across Diverse Business Scenarios and Interactions
May 24, 2025While AI agents hold transformative potential in business, effective performance benchmarking is hindered by the scarcity of public, realistic business data on widely used platforms. Existing benchmarks often lack fidelity in their environments, data, and agent-user interactions, with limited coverage of diverse business scenarios and industries. To address these gaps, we introduce CRMArena-Pro, a novel benchmark for holistic, realistic assessment of LLM agents in diverse professional settings. CRMArena-Pro expands on CRMArena with nineteen expert-validated tasks across sales, service, and 'configure, price, and quote' processes, for both Business-to-Business and Business-to-Customer scenarios. It distinctively incorporates multi-turn interactions guided by diverse personas and robust confidentiality awareness assessments. Experiments reveal leading LLM agents achieve only around 58% single-turn success on CRMArena-Pro, with performance dropping significantly to approximately 35% in multi-turn settings. While Workflow Execution proves more tractable for top agents (over 83% single-turn success), other evaluated business skills present greater challenges. Furthermore, agents exhibit near-zero inherent confidentiality awareness; though targeted prompting can improve this, it often compromises task performance. These findings highlight a substantial gap between current LLM capabilities and enterprise demands, underscoring the need for advancements in multi-turn reasoning, confidentiality adherence, and versatile skill acquisition.