 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePushing Forward Pareto Frontiers of Proactive Agents with Behavioral Agentic Optimization
Feb 11, 2026Proactive large language model (LLM) agents aim to actively plan, query, and interact over multiple turns, enabling efficient task completion beyond passive instruction following and making them essential for real-world, user-centric applications. Agentic reinforcement learning (RL) has recently emerged as a promising solution for training such agents in multi-turn settings, allowing interaction strategies to be learned from feedback. However, existing pipelines face a critical challenge in balancing task performance with user engagement, as passive agents can not efficiently adapt to users' intentions while overuse of human feedback reduces their satisfaction. To address this trade-off, we propose BAO, an agentic RL framework that combines behavior enhancement to enrich proactive reasoning and information-gathering capabilities with behavior regularization to suppress inefficient or redundant interactions and align agent behavior with user expectations. We evaluate BAO on multiple tasks from the UserRL benchmark suite, and demonstrate that it substantially outperforms proactive agentic RL baselines while achieving comparable or even superior performance to commercial LLM agents, highlighting its effectiveness for training proactive, user-aligned LLM agents in complex multi-turn scenarios. Our website: https://proactive-agentic-rl.github.io/.
LoCoBench-Agent: An Interactive Benchmark for LLM Agents in Long-Context Software Engineering
Nov 17, 2025



As large language models (LLMs) evolve into sophisticated autonomous agents capable of complex software development tasks, evaluating their real-world capabilities becomes critical. While existing benchmarks like LoCoBench~\cite{qiu2025locobench} assess long-context code understanding, they focus on single-turn evaluation and cannot capture the multi-turn interactive nature, tool usage patterns, and adaptive reasoning required by real-world coding agents. We introduce \textbf{LoCoBench-Agent}, a comprehensive evaluation framework specifically designed to assess LLM agents in realistic, long-context software engineering workflows. Our framework extends LoCoBench's 8,000 scenarios into interactive agent environments, enabling systematic evaluation of multi-turn conversations, tool usage efficiency, error recovery, and architectural consistency across extended development sessions. We also introduce an evaluation methodology with 9 metrics across comprehension and efficiency dimensions. Our framework provides agents with 8 specialized tools (file operations, search, code analysis) and evaluates them across context lengths ranging from 10K to 1M tokens, enabling precise assessment of long-context performance. Through systematic evaluation of state-of-the-art models, we reveal several key findings: (1) agents exhibit remarkable long-context robustness; (2) comprehension-efficiency trade-off exists with negative correlation, where thorough exploration increases comprehension but reduces efficiency; and (3) conversation efficiency varies dramatically across models, with strategic tool usage patterns differentiating high-performing agents. As the first long-context LLM agent benchmark for software engineering, LoCoBench-Agent establishes a rigorous foundation for measuring agent capabilities, identifying performance gaps, and advancing autonomous software development at scale.
Grounded Test-Time Adaptation for LLM Agents
Nov 06, 2025



Large language model (LLM)-based agents struggle to generalize to novel and complex environments, such as unseen websites or new sets of functions, due to a fundamental mismatch between their pre-training and test-time conditions. This challenge stems from two distinct failure modes: a syntactic misunderstanding of environment-specific components like observation formats, and a semantic misunderstanding of state-transition dynamics, which are only revealed at test time. To address these issues, we propose two distinct and complementary strategies for adapting LLM agents by leveraging environment-specific information available during deployment. First, an online distributional adaptation method parameterizes environmental nuances by learning a lightweight adaptation vector that biases the model's output distribution, enabling rapid alignment with an environment response format. Second, a deployment-time dynamics grounding method employs a persona-driven exploration phase to systematically probe and learn the environment's causal dynamics before task execution, equipping the agent with a nonparametric world model. We evaluate these strategies across diverse agentic benchmarks, including function calling and web navigation. Our empirical results show the effectiveness of both strategies across all benchmarks with minimal computational cost. We find that dynamics grounding is particularly effective in complex environments where unpredictable dynamics pose a major obstacle, demonstrating a robust path toward more generalizable and capable LLM-based agents. For example, on the WebArena multi-site split, this method increases the agent's success rate from 2% to 23%.
ToolLibGen: Scalable Automatic Tool Creation and Aggregation for LLM Reasoning
Oct 09, 2025



Large Language Models (LLMs) equipped with external tools have demonstrated enhanced performance on complex reasoning tasks. The widespread adoption of this tool-augmented reasoning is hindered by the scarcity of domain-specific tools. For instance, in domains such as physics question answering, suitable and specialized tools are often missing. Recent work has explored automating tool creation by extracting reusable functions from Chain-of-Thought (CoT) reasoning traces; however, these approaches face a critical scalability bottleneck. As the number of generated tools grows, storing them in an unstructured collection leads to significant retrieval challenges, including an expanding search space and ambiguity between function-related tools. To address this, we propose a systematic approach to automatically refactor an unstructured collection of tools into a structured tool library. Our system first generates discrete, task-specific tools and clusters them into semantically coherent topics. Within each cluster, we introduce a multi-agent framework to consolidate scattered functionalities: a code agent refactors code to extract shared logic and creates versatile, aggregated tools, while a reviewing agent ensures that these aggregated tools maintain the complete functional capabilities of the original set. This process transforms numerous question-specific tools into a smaller set of powerful, aggregated tools without loss of functionality. Experimental results demonstrate that our approach significantly improves tool retrieval accuracy and overall reasoning performance across multiple reasoning tasks. Furthermore, our method shows enhanced scalability compared with baselines as the number of question-specific increases.
LoCoBench: A Benchmark for Long-Context Large Language Models in Complex Software Engineering
Sep 11, 2025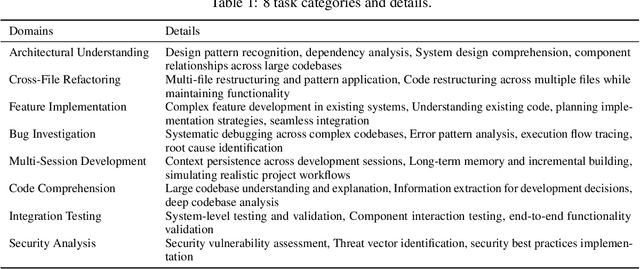
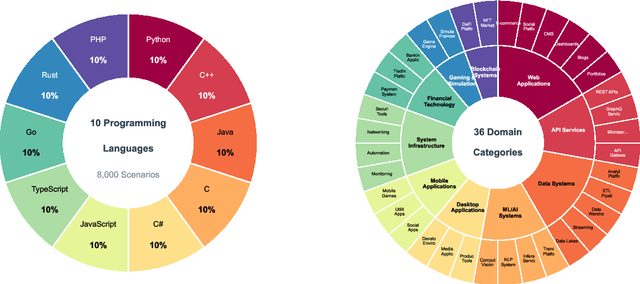
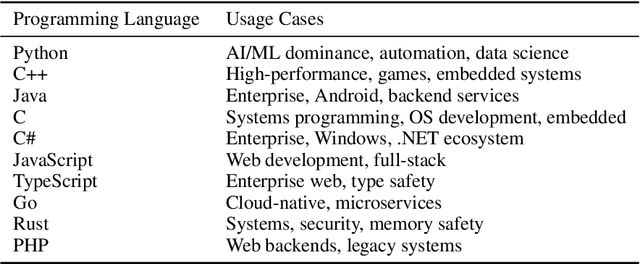
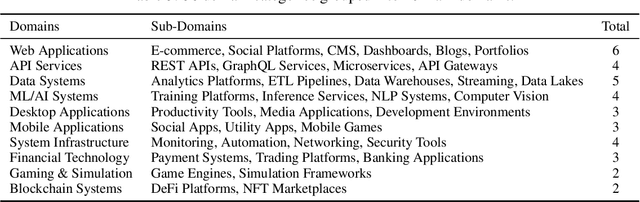
The emergence of long-context language models with context windows extending to millions of tokens has created new opportunities for sophisticated code understanding and software development evaluation. We propose LoCoBench, a comprehensive benchmark specifically designed to evaluate long-context LLMs in realistic, complex software development scenarios. Unlike existing code evaluation benchmarks that focus on single-function completion or short-context tasks, LoCoBench addresses the critical evaluation gap for long-context capabilities that require understanding entire codebases, reasoning across multiple files, and maintaining architectural consistency across large-scale software systems. Our benchmark provides 8,000 evaluation scenarios systematically generated across 10 programming languages, with context lengths spanning 10K to 1M tokens, a 100x variation that enables precise assessment of long-context performance degradation in realistic software development settings. LoCoBench introduces 8 task categories that capture essential long-context capabilities: architectural understanding, cross-file refactoring, multi-session development, bug investigation, feature implementation, code comprehension, integration testing, and security analysis. Through a 5-phase pipeline, we create diverse, high-quality scenarios that challenge LLMs to reason about complex codebases at unprecedented scale. We introduce a comprehensive evaluation framework with 17 metrics across 4 dimensions, including 8 new evaluation metrics, combined in a LoCoBench Score (LCBS). Our evaluation of state-of-the-art long-context models reveals substantial performance gaps, demonstrating that long-context understanding in complex software development represents a significant unsolved challenge that demands more attention. LoCoBench is released at: https://github.com/SalesforceAIResearch/LoCoBench.
UserBench: An Interactive Gym Environment for User-Centric Agents
Jul 29, 2025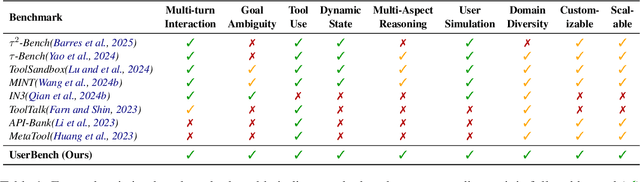


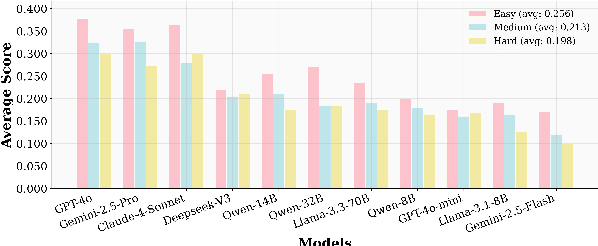
Large Language Models (LLMs)-based agents have made impressive progress in reasoning and tool use, enabling them to solve complex tasks. However, their ability to proactively collaborate with users, especially when goals are vague, evolving, or indirectly expressed, remains underexplored. To address this gap, we introduce UserBench, a user-centric benchmark designed to evaluate agents in multi-turn, preference-driven interactions. UserBench features simulated users who start with underspecified goals and reveal preferences incrementally, requiring agents to proactively clarify intent and make grounded decisions with tools. Our evaluation of leading open- and closed-source LLMs reveals a significant disconnect between task completion and user alignment. For instance, models provide answers that fully align with all user intents only 20% of the time on average, and even the most advanced models uncover fewer than 30% of all user preferences through active interaction. These results highlight the challenges of building agents that are not just capable task executors, but true collaborative partners. UserBench offers an interactive environment to measure and advance this critical capability.
MoDoMoDo: Multi-Domain Data Mixtures for Multimodal LLM Reinforcement Learning
May 30, 2025



Reinforcement Learning with Verifiable Rewards (RLVR) has recently emerged as a powerful paradigm for post-training large language models (LLMs), achieving state-of-the-art performance on tasks with structured, verifiable answers. Applying RLVR to Multimodal LLMs (MLLMs) presents significant opportunities but is complicated by the broader, heterogeneous nature of vision-language tasks that demand nuanced visual, logical, and spatial capabilities. As such, training MLLMs using RLVR on multiple datasets could be beneficial but creates challenges with conflicting objectives from interaction among diverse datasets, highlighting the need for optimal dataset mixture strategies to improve generalization and reasoning. We introduce a systematic post-training framework for Multimodal LLM RLVR, featuring a rigorous data mixture problem formulation and benchmark implementation. Specifically, (1) We developed a multimodal RLVR framework for multi-dataset post-training by curating a dataset that contains different verifiable vision-language problems and enabling multi-domain online RL learning with different verifiable rewards; (2) We proposed a data mixture strategy that learns to predict the RL fine-tuning outcome from the data mixture distribution, and consequently optimizes the best mixture. Comprehensive experiments showcase that multi-domain RLVR training, when combined with mixture prediction strategies, can significantly boost MLLM general reasoning capacities. Our best mixture improves the post-trained model's accuracy on out-of-distribution benchmarks by an average of 5.24% compared to the same model post-trained with uniform data mixture, and by a total of 20.74% compared to the pre-finetuning baseline.
Behavior Injection: Preparing Language Models for Reinforcement Learning
May 25, 2025Reinforcement fine-tuning (RFT) has emerged as a powerful post-training technique to incentivize the reasoning ability of large language models (LLMs). However, LLMs can respond very inconsistently to RFT: some show substantial performance gains, while others plateau or even degrade. To understand this divergence, we analyze the per-step influence of the RL objective and identify two key conditions for effective post-training: (1) RL-informative rollout accuracy, and (2) strong data co-influence, which quantifies how much the training data affects performance on other samples. Guided by these insights, we propose behavior injection, a task-agnostic data-augmentation scheme applied prior to RL. Behavior injection enriches the supervised finetuning (SFT) data by seeding exploratory and exploitative behaviors, effectively making the model more RL-ready. We evaluate our method across two reasoning benchmarks with multiple base models. The results demonstrate that our theoretically motivated augmentation can significantly increases the performance gain from RFT over the pre-RL model.
APIGen-MT: Agentic Pipeline for Multi-Turn Data Generation via Simulated Agent-Human Interplay
Apr 08, 2025Training effective AI agents for multi-turn interactions requires high-quality data that captures realistic human-agent dynamics, yet such data is scarce and expensive to collect manually. We introduce APIGen-MT, a two-phase framework that generates verifiable and diverse multi-turn agent data. In the first phase, our agentic pipeline produces detailed task blueprints with ground-truth actions, leveraging a committee of LLM reviewers and iterative feedback loops. These blueprints are then transformed into complete interaction trajectories through simulated human-agent interplay. We train a family of models -- the xLAM-2-fc-r series with sizes ranging from 1B to 70B parameters. Our models outperform frontier models such as GPT-4o and Claude 3.5 on $\tau$-bench and BFCL benchmarks, with the smaller models surpassing their larger counterparts, particularly in multi-turn settings, while maintaining superior consistency across multiple trials. Comprehensive experiments demonstrate that our verified blueprint-to-details approach yields high-quality training data, enabling the development of more reliable, efficient, and capable agents. We open-source both the synthetic data collected and the trained xLAM-2-fc-r models to advance research in AI agents. Models are available on HuggingFace at https://huggingface.co/collections/Salesforce/xlam-2-67ef5be12949d8dcdae354c4 and project website is https://apigen-mt.github.io
ActionStudio: A Lightweight Framework for Data and Training of Large Action Models
Mar 31, 2025Action models are essential for enabling autonomous agents to perform complex tasks. However, training large action models remains challenging due to the diversity of agent environments and the complexity of agentic data. Despite growing interest, existing infrastructure provides limited support for scalable, agent-specific fine-tuning. We present ActionStudio, a lightweight and extensible data and training framework designed for large action models. ActionStudio unifies heterogeneous agent trajectories through a standardized format, supports diverse training paradigms including LoRA, full fine-tuning, and distributed setups, and integrates robust preprocessing and verification tools. We validate its effectiveness across both public and realistic industry benchmarks, demonstrating strong performance and practical scalability. We open-sourced code and data at https://github.com/SalesforceAIResearch/xLAM to facilitate research in the community.