 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Goal Generation for Reinforcement Learning Agents
Jul 23, 2018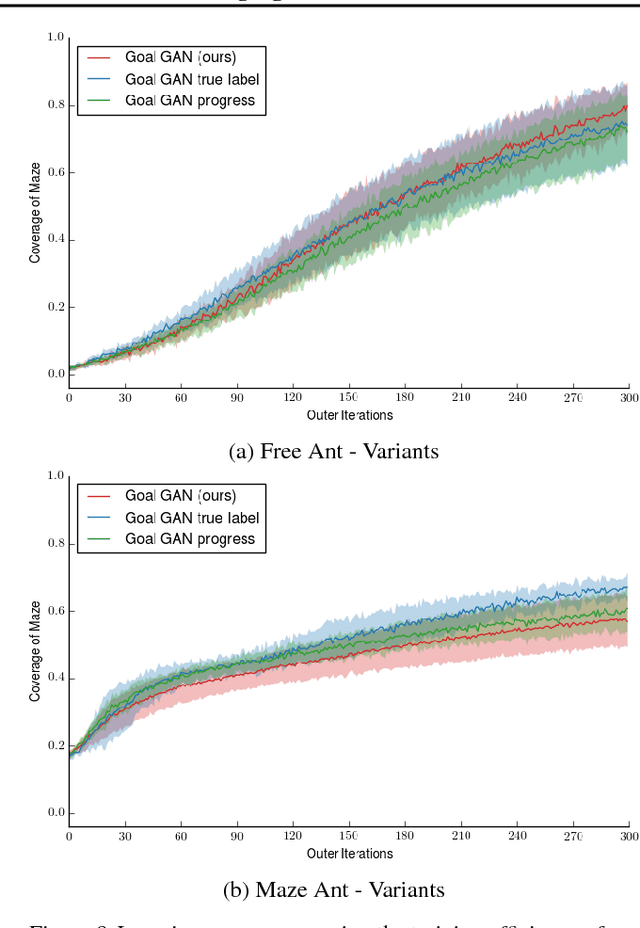
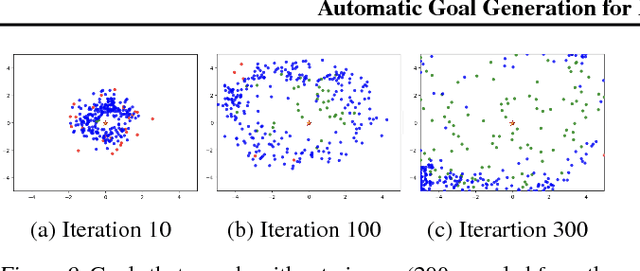
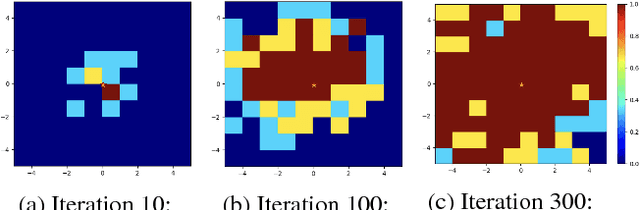
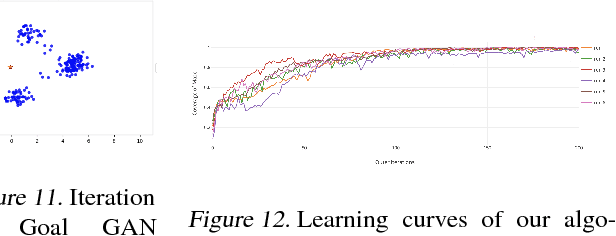
Reinforcement learning is a powerful technique to train an agent to perform a task. However, an agent that is trained using reinforcement learning is only capable of achieving the single task that is specified via its reward function. Such an approach does not scale well to settings in which an agent needs to perform a diverse set of tasks, such as navigating to varying positions in a room or moving objects to varying locations. Instead, we propose a method that allows an agent to automatically discover the range of tasks that it is capable of performing. We use a generator network to propose tasks for the agent to try to achieve, specified as goal states. The generator network is optimized using adversarial training to produce tasks that are always at the appropriate level of difficulty for the agent. Our method thus automatically produces a curriculum of tasks for the agent to learn. We show that, by using this framework, an agent can efficiently and automatically learn to perform a wide set of tasks without requiring any prior knowledge of its environment. Our method can also learn to achieve tasks with sparse rewards, which traditionally pose significant challenges.
Imitation from Observation: Learning to Imitate Behaviors from Raw Video via Context Translation
Jun 18, 2018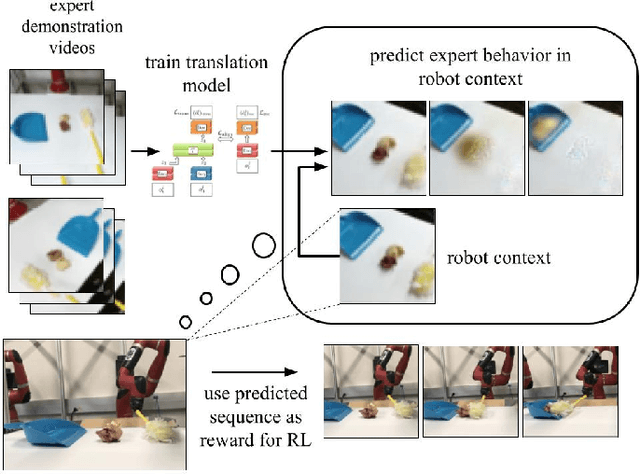
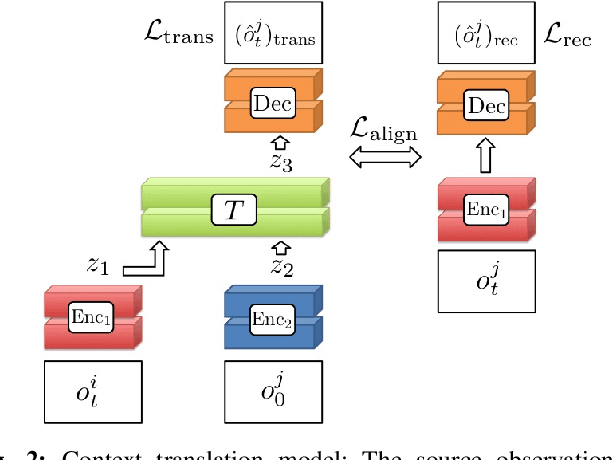
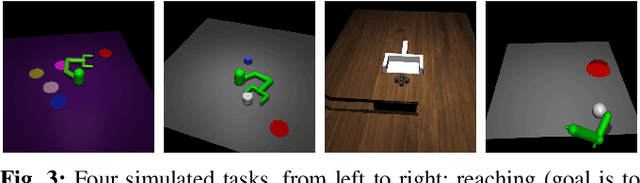
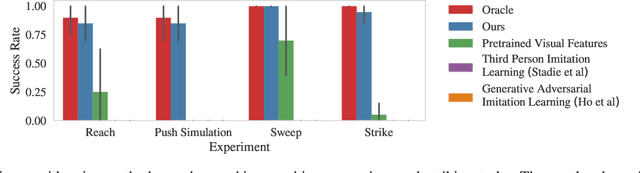
Imitation learning is an effective approach for autonomous systems to acquire control policies when an explicit reward function is unavailable, using supervision provided as demonstrations from an expert, typically a human operator. However, standard imitation learning methods assume that the agent receives examples of observation-action tuples that could be provided, for instance, to a supervised learning algorithm. This stands in contrast to how humans and animals imitate: we observe another person performing some behavior and then figure out which actions will realize that behavior, compensating for changes in viewpoint, surroundings, object positions and types, and other factors. We term this kind of imitation learning "imitation-from-observation," and propose an imitation learning method based on video prediction with context translation and deep reinforcement learning. This lifts the assumption in imitation learning that the demonstration should consist of observations in the same environment configuration, and enables a variety of interesting applications, including learning robotic skills that involve tool use simply by observing videos of human tool use. Our experimental results show the effectiveness of our approach in learning a wide range of real-world robotic tasks modeled after common household chores from videos of a human demonstrator, including sweeping, ladling almonds, pushing objects as well as a number of tasks in simulation.
Self-Consistent Trajectory Autoencoder: Hierarchical Reinforcement Learning with Trajectory Embeddings
Jun 07, 2018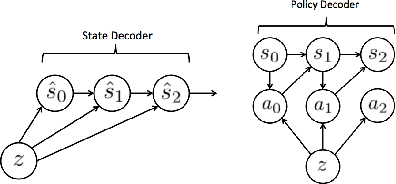
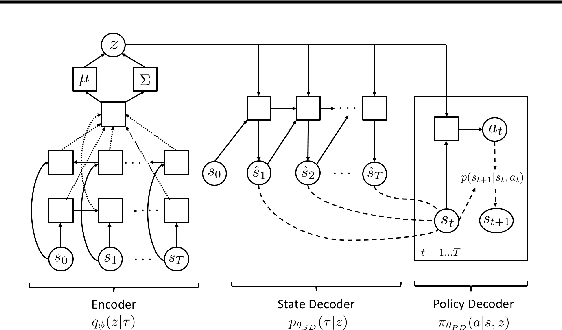
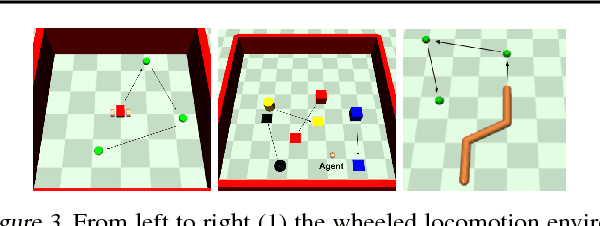
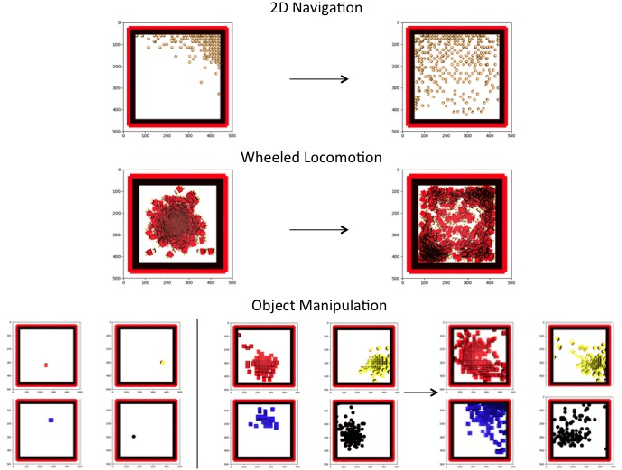
In this work, we take a representation learning perspective on hierarchical reinforcement learning, where the problem of learning lower layers in a hierarchy is transformed into the problem of learning trajectory-level generative models. We show that we can learn continuous latent representations of trajectories, which are effective in solving temporally extended and multi-stage problems. Our proposed model, SeCTAR, draws inspiration from variational autoencoders, and learns latent representations of trajectories. A key component of this method is to learn both a latent-conditioned policy and a latent-conditioned model which are consistent with each other. Given the same latent, the policy generates a trajectory which should match the trajectory predicted by the model. This model provides a built-in prediction mechanism, by predicting the outcome of closed loop policy behavior. We propose a novel algorithm for performing hierarchical RL with this model, combining model-based planning in the learned latent space with an unsupervised exploration objective. We show that our model is effective at reasoning over long horizons with sparse rewards for several simulated tasks, outperforming standard reinforcement learning methods and prior methods for hierarchical reasoning, model-based planning, and exploration.
Self-supervised Deep Reinforcement Learning with Generalized Computation Graphs for Robot Navigation
May 17, 2018
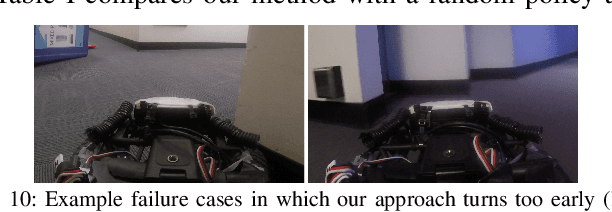
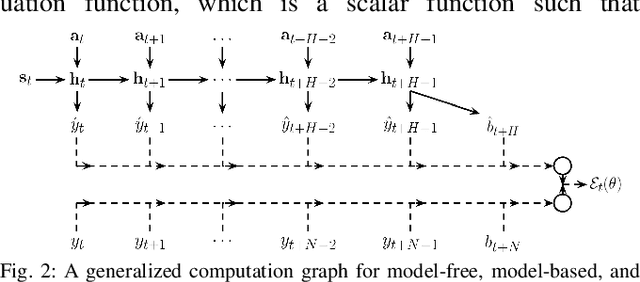
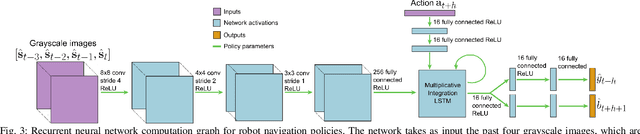
Enabling robots to autonomously navigate complex environments is essential for real-world deployment. Prior methods approach this problem by having the robot maintain an internal map of the world, and then use a localization and planning method to navigate through the internal map. However, these approaches often include a variety of assumptions, are computationally intensive, and do not learn from failures. In contrast, learning-based methods improve as the robot acts in the environment, but are difficult to deploy in the real-world due to their high sample complexity. To address the need to learn complex policies with few samples, we propose a generalized computation graph that subsumes value-based model-free methods and model-based methods, with specific instantiations interpolating between model-free and model-based. We then instantiate this graph to form a navigation model that learns from raw images and is sample efficient. Our simulated car experiments explore the design decisions of our navigation model, and show our approach outperforms single-step and $N$-step double Q-learning. We also evaluate our approach on a real-world RC car and show it can learn to navigate through a complex indoor environment with a few hours of fully autonomous, self-supervised training. Videos of the experiments and code can be found at github.com/gkahn13/gcg
Evolved Policy Gradients
Apr 29, 2018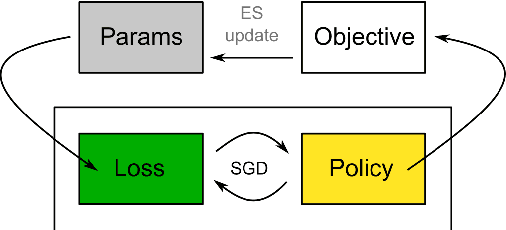
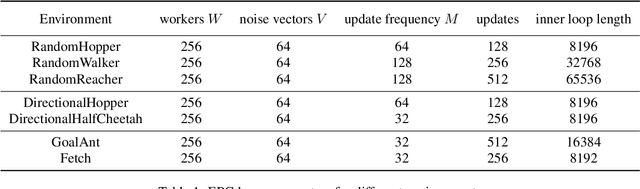
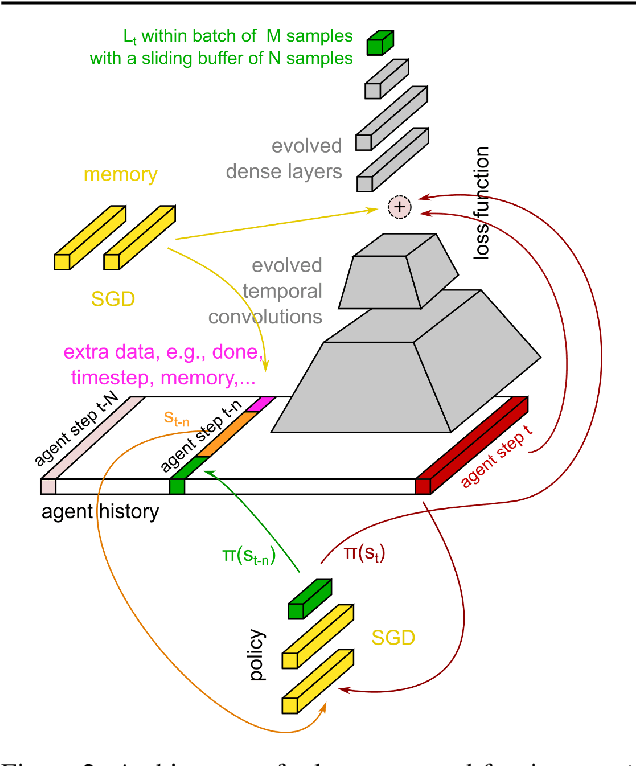
We propose a metalearning approach for learning gradient-based reinforcement learning (RL) algorithms. The idea is to evolve a differentiable loss function, such that an agent, which optimizes its policy to minimize this loss, will achieve high rewards. The loss is parametrized via temporal convolutions over the agent's experience. Because this loss is highly flexible in its ability to take into account the agent's history, it enables fast task learning. Empirical results show that our evolved policy gradient algorithm (EPG) achieves faster learning on several randomized environments compared to an off-the-shelf policy gradient method. We also demonstrate that EPG's learned loss can generalize to out-of-distribution test time tasks, and exhibits qualitatively different behavior from other popular metalearning algorithms.
The Limits and Potentials of Deep Learning for Robotics
Apr 18, 2018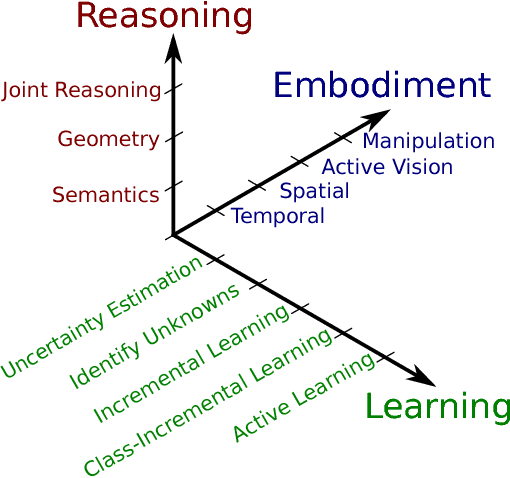
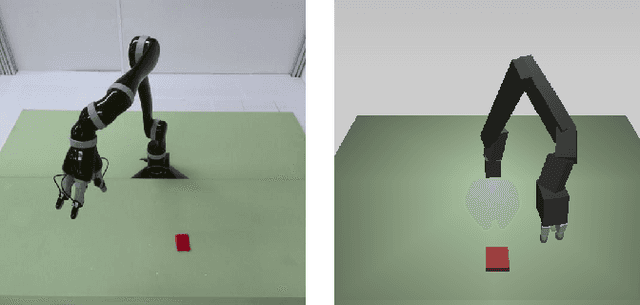
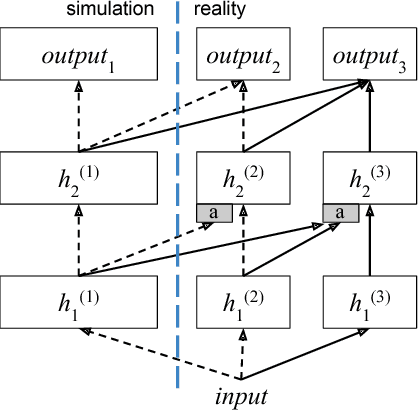
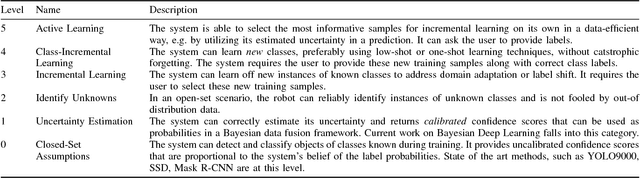
The application of deep learning in robotics leads to very specific problems and research questions that are typically not addressed by the computer vision and machine learning communities. In this paper we discuss a number of robotics-specific learning, reasoning, and embodiment challenges for deep learning. We explain the need for better evaluation metrics, highlight the importance and unique challenges for deep robotic learning in simulation, and explore the spectrum between purely data-driven and model-driven approaches. We hope this paper provides a motivating overview of important research directions to overcome the current limitations, and help fulfill the promising potentials of deep learning in robotics.
Stochastic Adversarial Video Prediction
Apr 04, 2018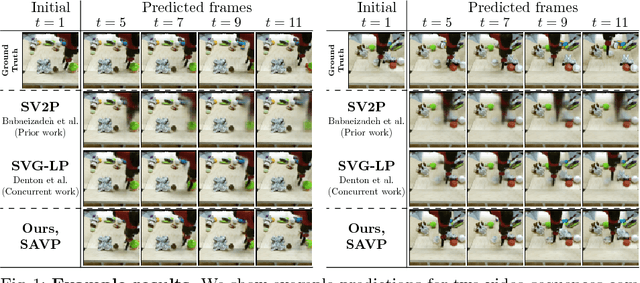
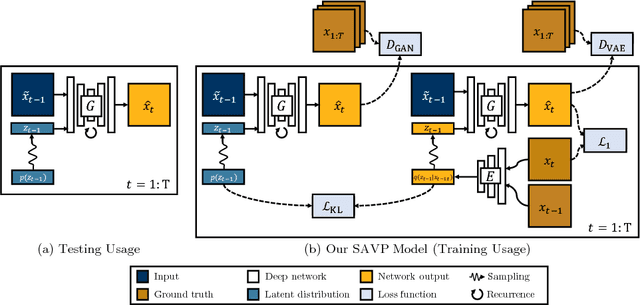
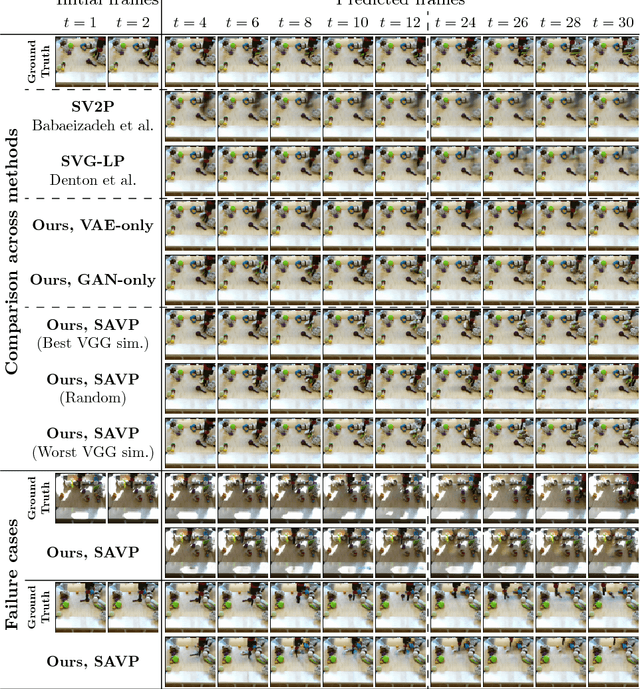
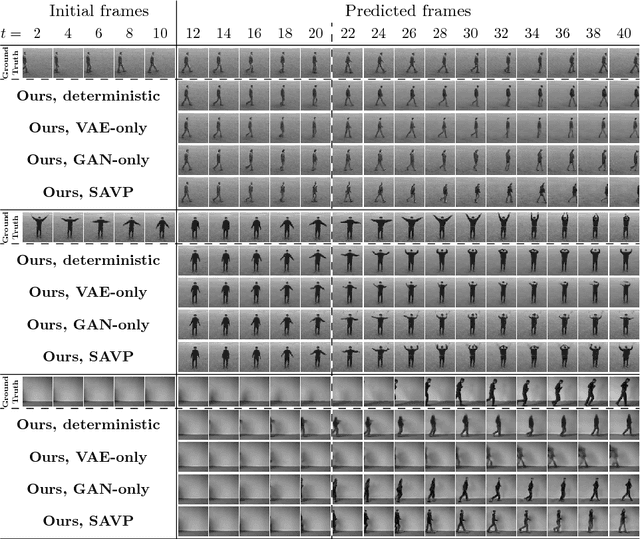
Being able to predict what may happen in the future requires an in-depth understanding of the physical and causal rules that govern the world. A model that is able to do so has a number of appealing applications, from robotic planning to representation learning. However, learning to predict raw future observations, such as frames in a video, is exceedingly challenging -- the ambiguous nature of the problem can cause a naively designed model to average together possible futures into a single, blurry prediction. Recently, this has been addressed by two distinct approaches: (a) latent variational variable models that explicitly model underlying stochasticity and (b) adversarially-trained models that aim to produce naturalistic images. However, a standard latent variable model can struggle to produce realistic results, and a standard adversarially-trained model underutilizes latent variables and fails to produce diverse predictions. We show that these distinct methods are in fact complementary. Combining the two produces predictions that look more realistic to human raters and better cover the range of possible futures. Our method outperforms prior and concurrent work in these aspects.
Universal Planning Networks
Apr 04, 2018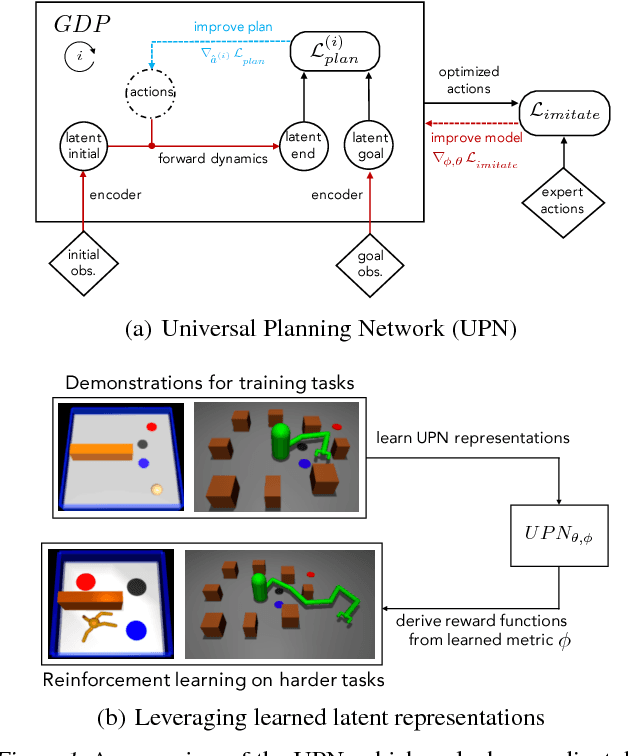
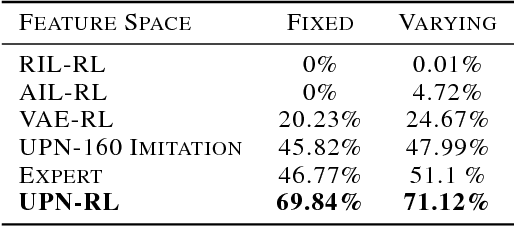
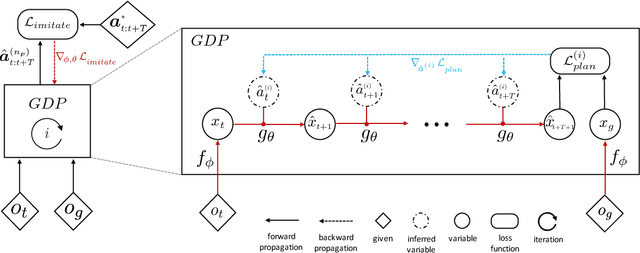
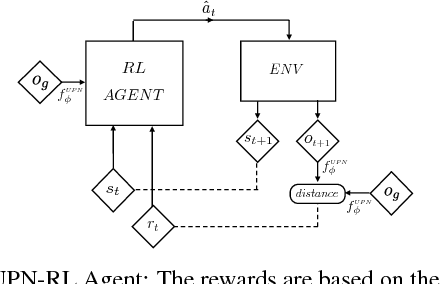
A key challenge in complex visuomotor control is learning abstract representations that are effective for specifying goals, planning, and generalization. To this end, we introduce universal planning networks (UPN). UPNs embed differentiable planning within a goal-directed policy. This planning computation unrolls a forward model in a latent space and infers an optimal action plan through gradient descent trajectory optimization. The plan-by-gradient-descent process and its underlying representations are learned end-to-end to directly optimize a supervised imitation learning objective. We find that the representations learned are not only effective for goal-directed visual imitation via gradient-based trajectory optimization, but can also provide a metric for specifying goals using images. The learned representations can be leveraged to specify distance-based rewards to reach new target states for model-free reinforcement learning, resulting in substantially more effective learning when solving new tasks described via image-based goals. We were able to achieve successful transfer of visuomotor planning strategies across robots with significantly different morphologies and actuation capabilities.
Domain Randomization and Generative Models for Robotic Grasping
Apr 03, 2018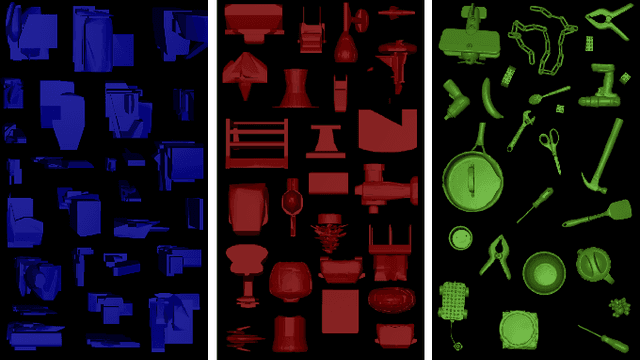
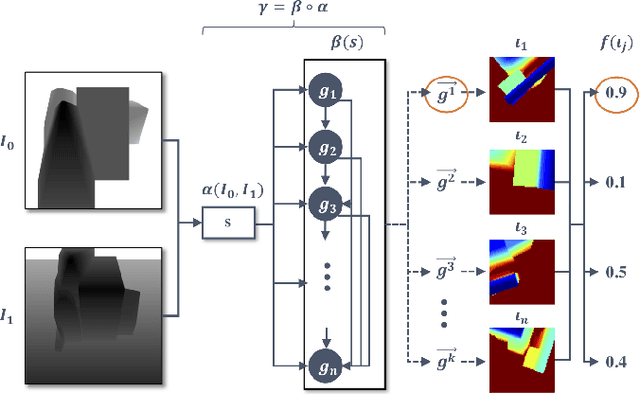
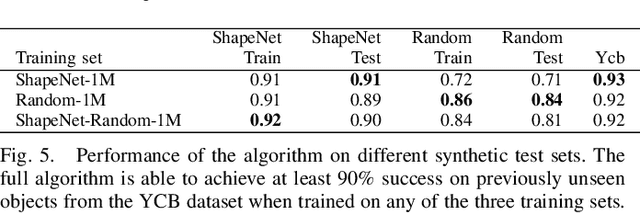
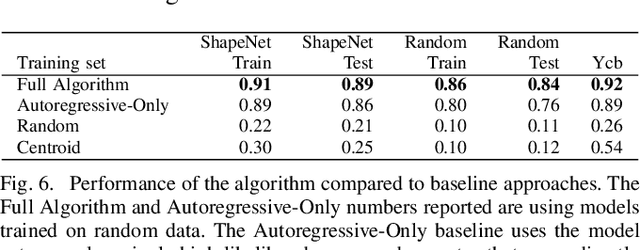
Deep learning-based robotic grasping has made significant progress thanks to algorithmic improvements and increased data availability. However, state-of-the-art models are often trained on as few as hundreds or thousands of unique object instances, and as a result generalization can be a challenge. In this work, we explore a novel data generation pipeline for training a deep neural network to perform grasp planning that applies the idea of domain randomization to object synthesis. We generate millions of unique, unrealistic procedurally generated objects, and train a deep neural network to perform grasp planning on these objects. Since the distribution of successful grasps for a given object can be highly multimodal, we propose an autoregressive grasp planning model that maps sensor inputs of a scene to a probability distribution over possible grasps. This model allows us to sample grasps efficiently at test time (or avoid sampling entirely). We evaluate our model architecture and data generation pipeline in simulation and the real world. We find we can achieve a $>$90% success rate on previously unseen realistic objects at test time in simulation despite having only been trained on random objects. We also demonstrate an 80% success rate on real-world grasp attempts despite having only been trained on random simulated objects.
Variance Reduction for Policy Gradient with Action-Dependent Factorized Baselines
Mar 20, 2018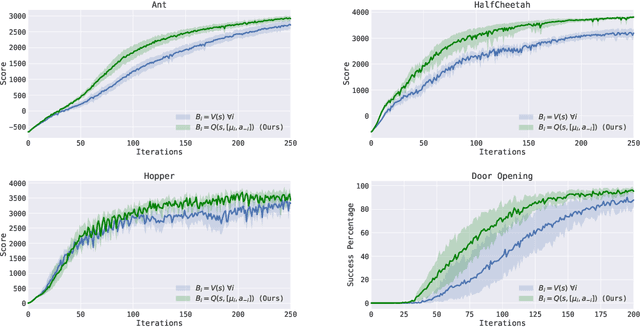
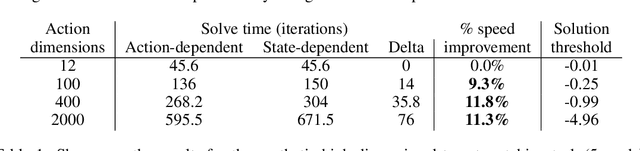
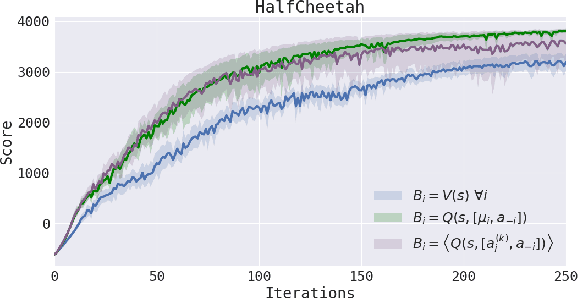
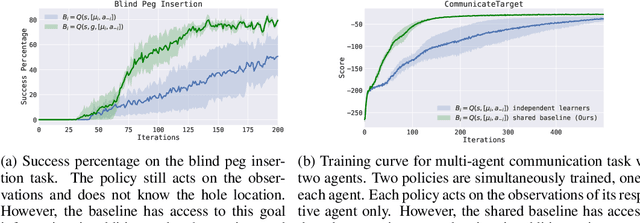
Policy gradient methods have enjoyed great success in deep reinforcement learning but suffer from high variance of gradient estimates. The high variance problem is particularly exasperated in problems with long horizons or high-dimensional action spaces. To mitigate this issue, we derive a bias-free action-dependent baseline for variance reduction which fully exploits the structural form of the stochastic policy itself and does not make any additional assumptions about the MDP. We demonstrate and quantify the benefit of the action-dependent baseline through both theoretical analysis as well as numerical results, including an analysis of the suboptimality of the optimal state-dependent baseline. The result is a computationally efficient policy gradient algorithm, which scales to high-dimensional control problems, as demonstrated by a synthetic 2000-dimensional target matching task. Our experimental results indicate that action-dependent baselines allow for faster learning on standard reinforcement learning benchmarks and high-dimensional hand manipulation and synthetic tasks. Finally, we show that the general idea of including additional information in baselines for improved variance reduction can be extended to partially observed and multi-agent tasks.