 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenAI o1 System Card
Dec 21, 2024



The o1 model series is trained with large-scale reinforcement learning to reason using chain of thought. These advanced reasoning capabilities provide new avenues for improving the safety and robustness of our models. In particular, our models can reason about our safety policies in context when responding to potentially unsafe prompts, through deliberative alignment. This leads to state-of-the-art performance on certain benchmarks for risks such as generating illicit advice, choosing stereotyped responses, and succumbing to known jailbreaks. Training models to incorporate a chain of thought before answering has the potential to unlock substantial benefits, while also increasing potential risks that stem from heightened intelligence. Our results underscore the need for building robust alignment methods, extensively stress-testing their efficacy, and maintaining meticulous risk management protocols. This report outlines the safety work carried out for the OpenAI o1 and OpenAI o1-mini models, including safety evaluations, external red teaming, and Preparedness Framework evaluations.
GPT-4o System Card
Oct 25, 2024GPT-4o is an autoregressive omni model that accepts as input any combination of text, audio, image, and video, and generates any combination of text, audio, and image outputs. It's trained end-to-end across text, vision, and audio, meaning all inputs and outputs are processed by the same neural network. GPT-4o can respond to audio inputs in as little as 232 milliseconds, with an average of 320 milliseconds, which is similar to human response time in conversation. It matches GPT-4 Turbo performance on text in English and code, with significant improvement on text in non-English languages, while also being much faster and 50\% cheaper in the API. GPT-4o is especially better at vision and audio understanding compared to existing models. In line with our commitment to building AI safely and consistent with our voluntary commitments to the White House, we are sharing the GPT-4o System Card, which includes our Preparedness Framework evaluations. In this System Card, we provide a detailed look at GPT-4o's capabilities, limitations, and safety evaluations across multiple categories, focusing on speech-to-speech while also evaluating text and image capabilities, and measures we've implemented to ensure the model is safe and aligned. We also include third-party assessments on dangerous capabilities, as well as discussion of potential societal impacts of GPT-4o's text and vision capabilities.
GLIDE: Towards Photorealistic Image Generation and Editing with Text-Guided Diffusion Models
Dec 22, 2021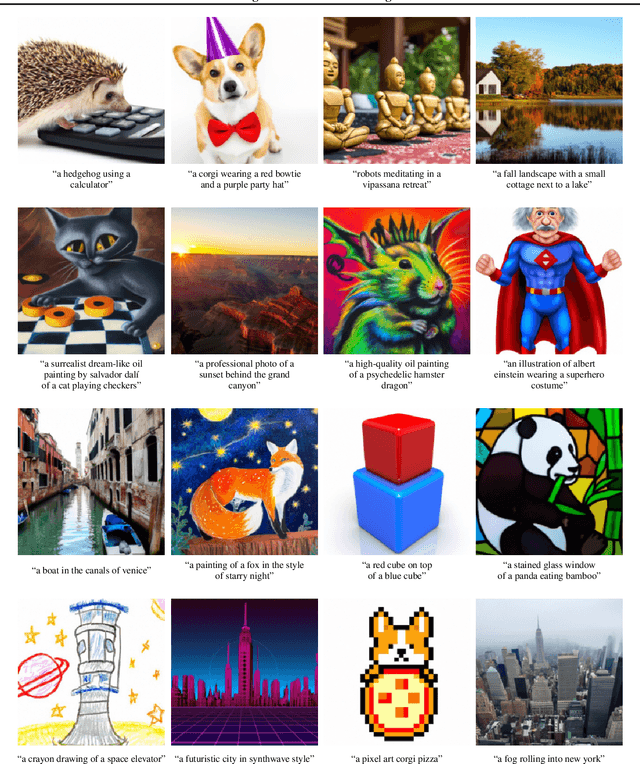
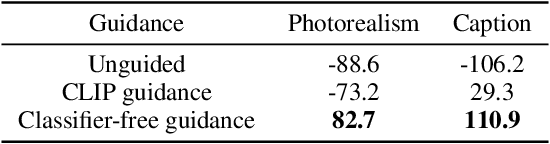
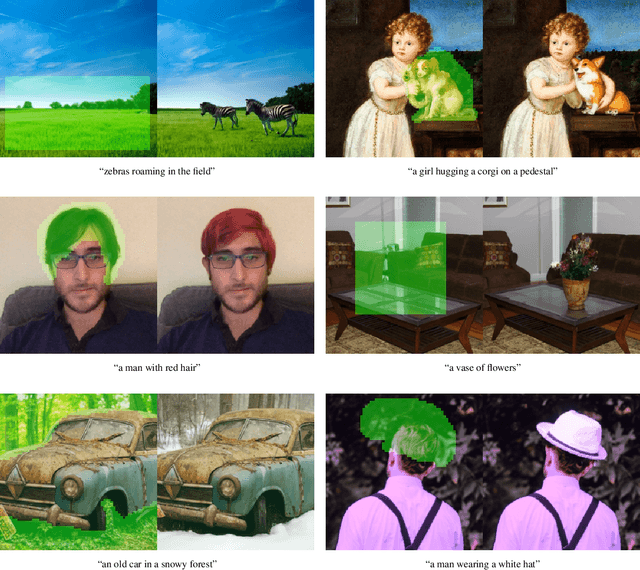
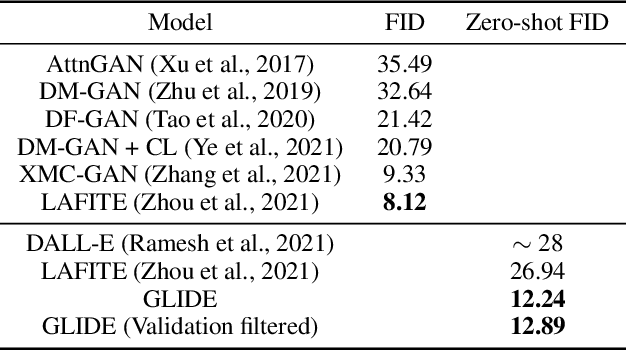
Diffusion models have recently been shown to generate high-quality synthetic images, especially when paired with a guidance technique to trade off diversity for fidelity. We explore diffusion models for the problem of text-conditional image synthesis and compare two different guidance strategies: CLIP guidance and classifier-free guidance. We find that the latter is preferred by human evaluators for both photorealism and caption similarity, and often produces photorealistic samples. Samples from a 3.5 billion parameter text-conditional diffusion model using classifier-free guidance are favored by human evaluators to those from DALL-E, even when the latter uses expensive CLIP reranking. Additionally, we find that our models can be fine-tuned to perform image inpainting, enabling powerful text-driven image editing. We train a smaller model on a filtered dataset and release the code and weights at https://github.com/openai/glide-text2im.
Evaluating Large Language Models Trained on Code
Jul 14, 2021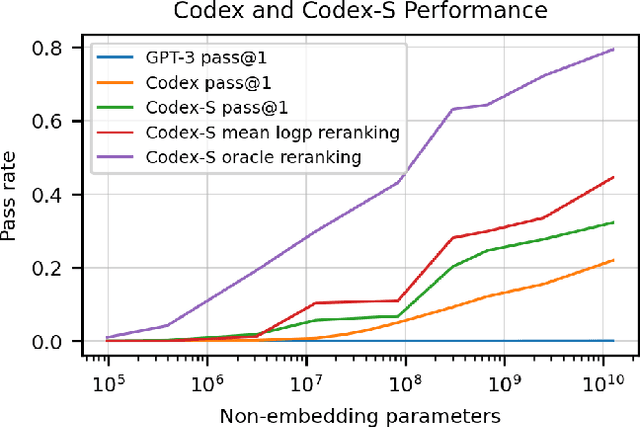
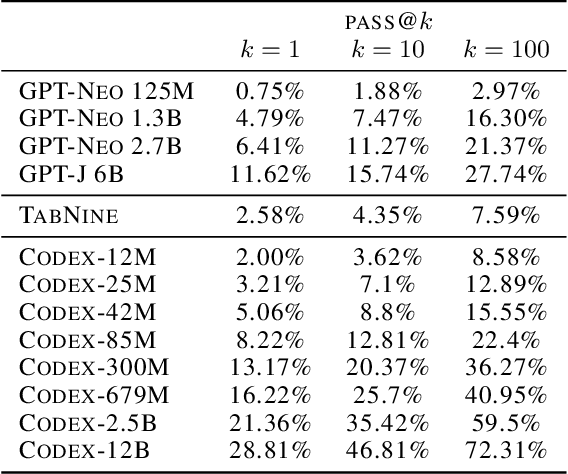
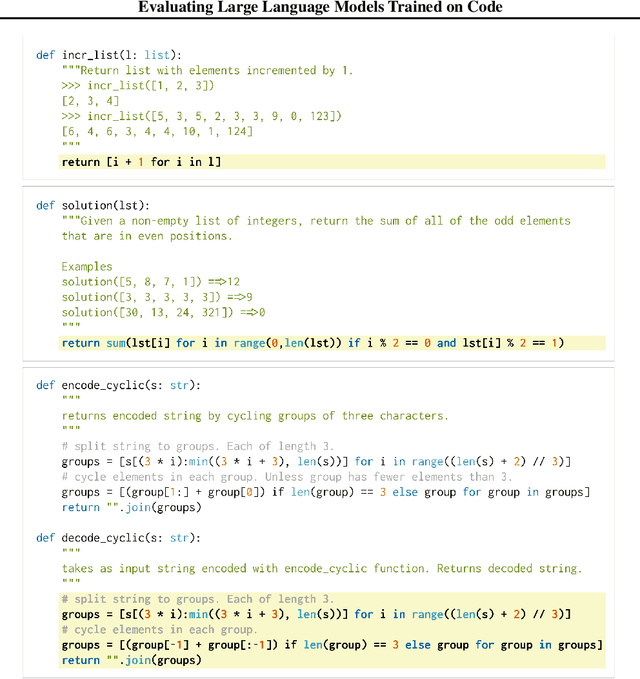
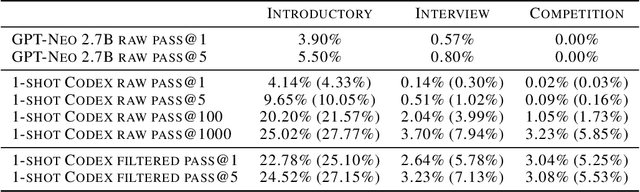
We introduce Codex, a GPT language model fine-tuned on publicly available code from GitHub, and study its Python code-writing capabilities. A distinct production version of Codex powers GitHub Copilot. On HumanEval, a new evaluation set we release to measure functional correctness for synthesizing programs from docstrings, our model solves 28.8% of the problems, while GPT-3 solves 0% and GPT-J solves 11.4%. Furthermore, we find that repeated sampling from the model is a surprisingly effective strategy for producing working solutions to difficult prompts. Using this method, we solve 70.2% of our problems with 100 samples per problem. Careful investigation of our model reveals its limitations, including difficulty with docstrings describing long chains of operations and with binding operations to variables. Finally, we discuss the potential broader impacts of deploying powerful code generation technologies, covering safety, security, and economics.
Solving Rubik's Cube with a Robot Hand
Oct 16, 2019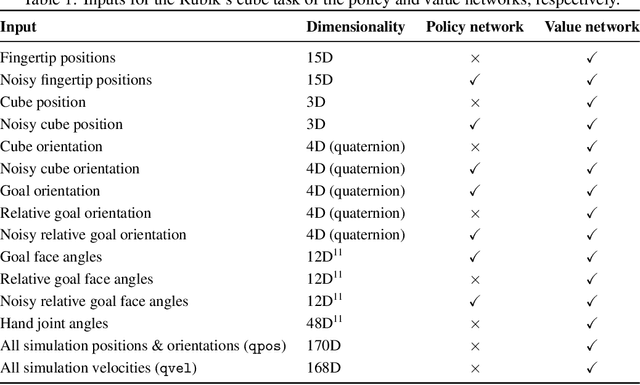
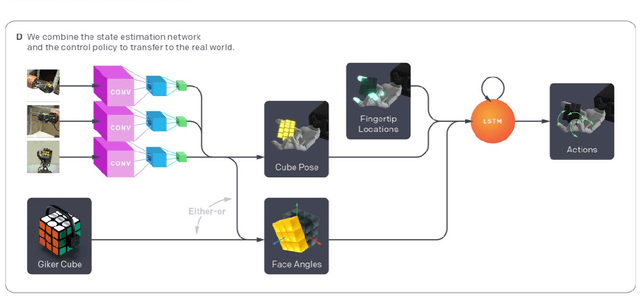
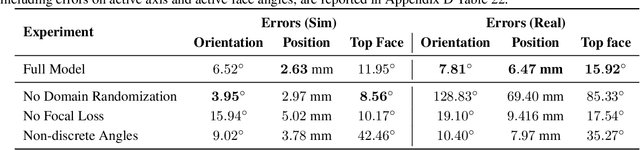
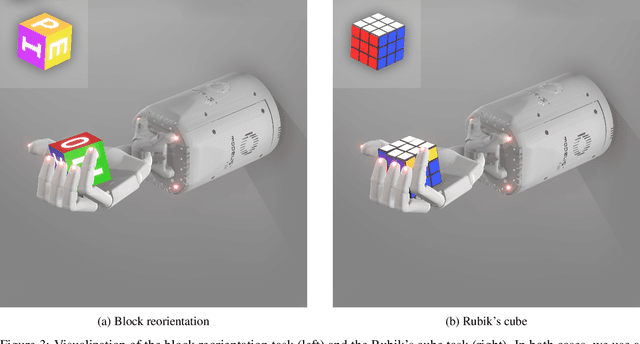
We demonstrate that models trained only in simulation can be used to solve a manipulation problem of unprecedented complexity on a real robot. This is made possible by two key components: a novel algorithm, which we call automatic domain randomization (ADR) and a robot platform built for machine learning. ADR automatically generates a distribution over randomized environments of ever-increasing difficulty. Control policies and vision state estimators trained with ADR exhibit vastly improved sim2real transfer. For control policies, memory-augmented models trained on an ADR-generated distribution of environments show clear signs of emergent meta-learning at test time. The combination of ADR with our custom robot platform allows us to solve a Rubik's cube with a humanoid robot hand, which involves both control and state estimation problems. Videos summarizing our results are available: https://openai.com/blog/solving-rubiks-cube/
Emergent Tool Use From Multi-Agent Autocurricula
Sep 17, 2019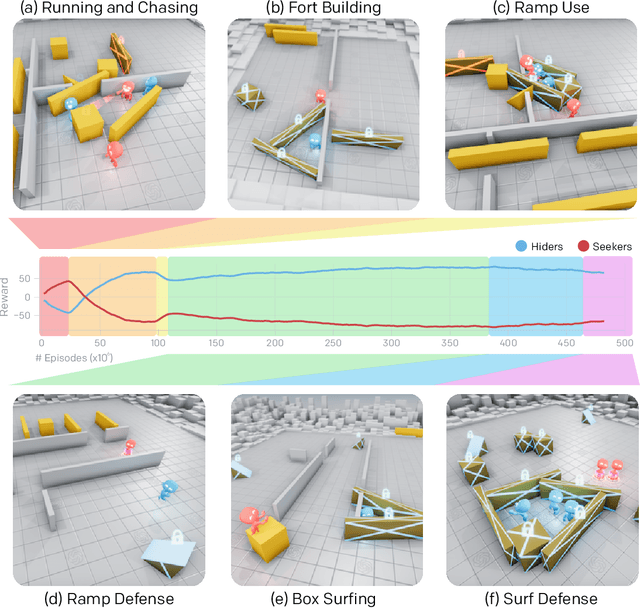
Through multi-agent competition, the simple objective of hide-and-seek, and standard reinforcement learning algorithms at scale, we find that agents create a self-supervised autocurriculum inducing multiple distinct rounds of emergent strategy, many of which require sophisticated tool use and coordination. We find clear evidence of six emergent phases in agent strategy in our environment, each of which creates a new pressure for the opposing team to adapt; for instance, agents learn to build multi-object shelters using moveable boxes which in turn leads to agents discovering that they can overcome obstacles using ramps. We further provide evidence that multi-agent competition may scale better with increasing environment complexity and leads to behavior that centers around far more human-relevant skills than other self-supervised reinforcement learning methods such as intrinsic motivation. Finally, we propose transfer and fine-tuning as a way to quantitatively evaluate targeted capabilities, and we compare hide-and-seek agents to both intrinsic motivation and random initialization baselines in a suite of domain-specific intelligence tests.
Learning Dexterous In-Hand Manipulation
Jan 18, 2019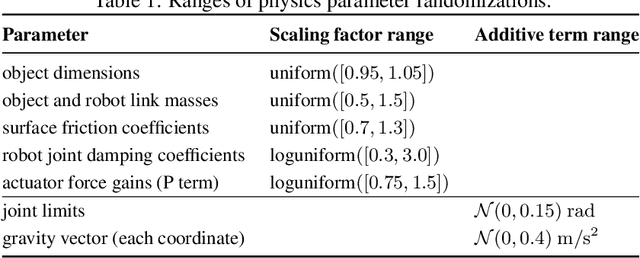
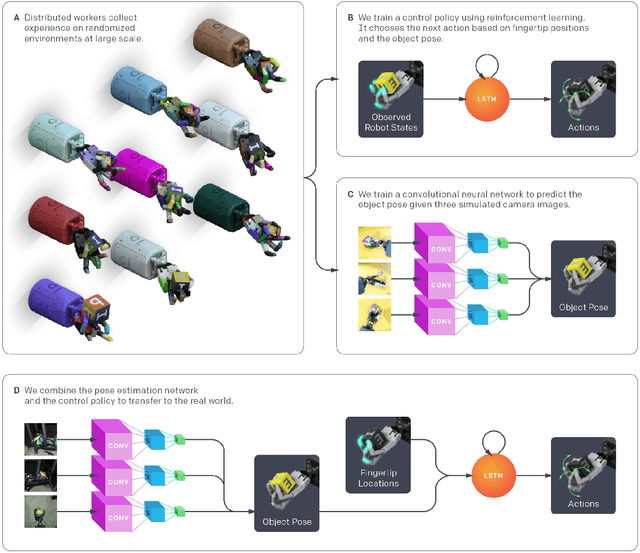
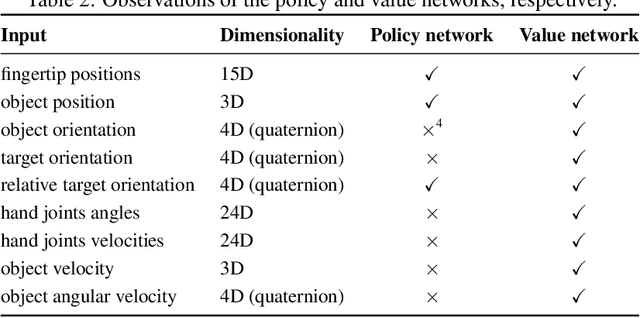
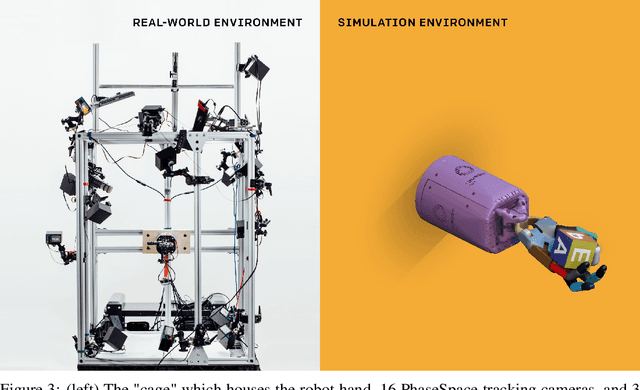
We use reinforcement learning (RL) to learn dexterous in-hand manipulation policies which can perform vision-based object reorientation on a physical Shadow Dexterous Hand. The training is performed in a simulated environment in which we randomize many of the physical properties of the system like friction coefficients and an object's appearance. Our policies transfer to the physical robot despite being trained entirely in simulation. Our method does not rely on any human demonstrations, but many behaviors found in human manipulation emerge naturally, including finger gaiting, multi-finger coordination, and the controlled use of gravity. Our results were obtained using the same distributed RL system that was used to train OpenAI Five. We also include a video of our results: https://youtu.be/jwSbzNHGflM
Domain Randomization and Generative Models for Robotic Grasping
Apr 03, 2018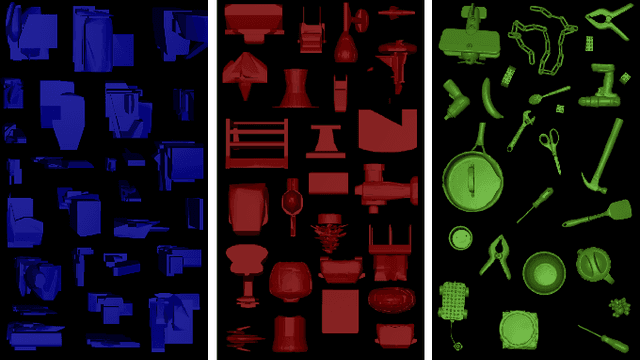
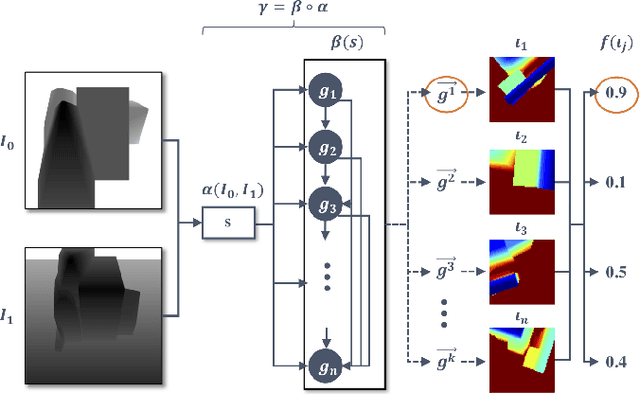
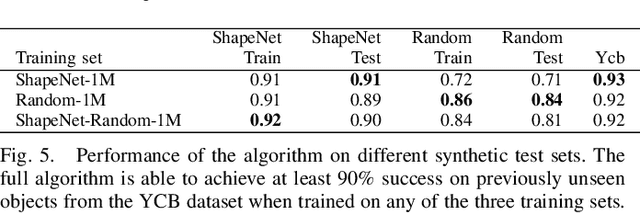
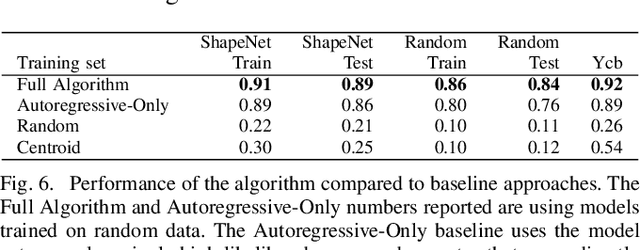
Deep learning-based robotic grasping has made significant progress thanks to algorithmic improvements and increased data availability. However, state-of-the-art models are often trained on as few as hundreds or thousands of unique object instances, and as a result generalization can be a challenge. In this work, we explore a novel data generation pipeline for training a deep neural network to perform grasp planning that applies the idea of domain randomization to object synthesis. We generate millions of unique, unrealistic procedurally generated objects, and train a deep neural network to perform grasp planning on these objects. Since the distribution of successful grasps for a given object can be highly multimodal, we propose an autoregressive grasp planning model that maps sensor inputs of a scene to a probability distribution over possible grasps. This model allows us to sample grasps efficiently at test time (or avoid sampling entirely). We evaluate our model architecture and data generation pipeline in simulation and the real world. We find we can achieve a $>$90% success rate on previously unseen realistic objects at test time in simulation despite having only been trained on random objects. We also demonstrate an 80% success rate on real-world grasp attempts despite having only been trained on random simulated objects.
Multi-Goal Reinforcement Learning: Challenging Robotics Environments and Request for Research
Mar 10, 2018
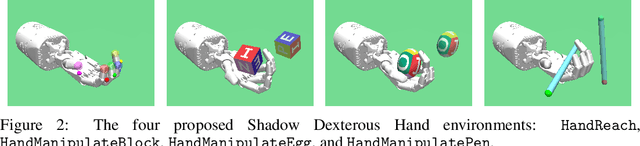
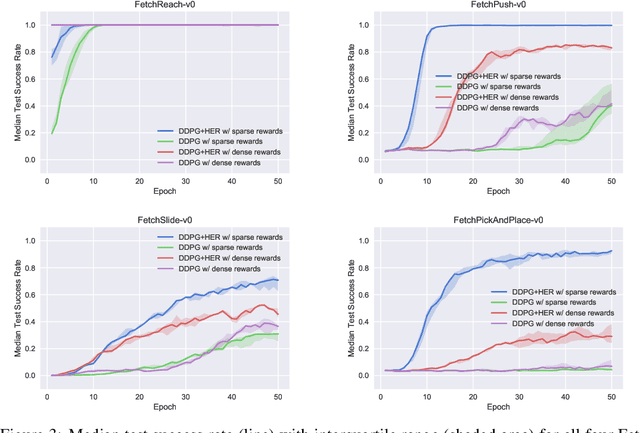
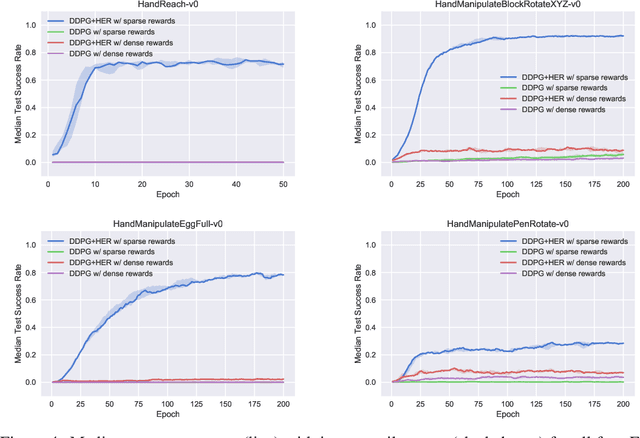
The purpose of this technical report is two-fold. First of all, it introduces a suite of challenging continuous control tasks (integrated with OpenAI Gym) based on currently existing robotics hardware. The tasks include pushing, sliding and pick & place with a Fetch robotic arm as well as in-hand object manipulation with a Shadow Dexterous Hand. All tasks have sparse binary rewards and follow a Multi-Goal Reinforcement Learning (RL) framework in which an agent is told what to do using an additional input. The second part of the paper presents a set of concrete research ideas for improving RL algorithms, most of which are related to Multi-Goal RL and Hindsight Experience Replay.
Overcoming Exploration in Reinforcement Learning with Demonstrations
Feb 25, 2018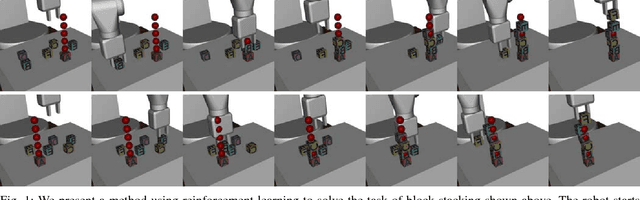
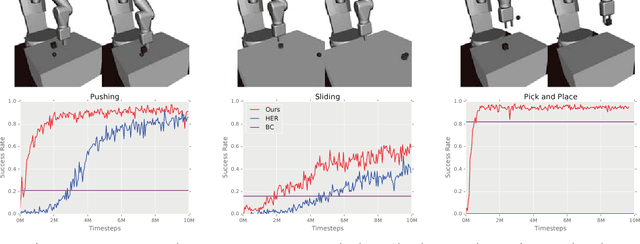
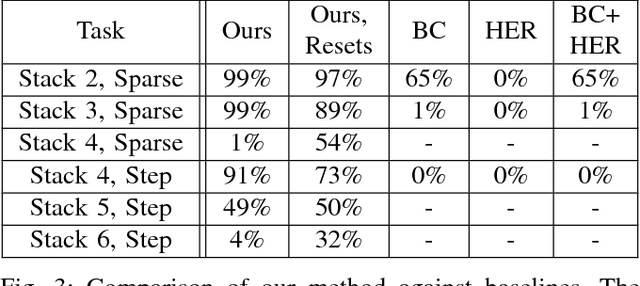
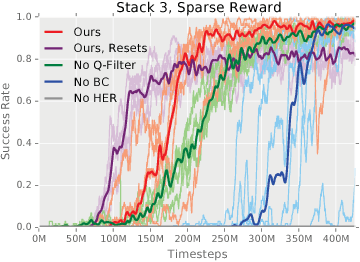
Exploration in environments with sparse rewards has been a persistent problem in reinforcement learning (RL). Many tasks are natural to specify with a sparse reward, and manually shaping a reward function can result in suboptimal performance. However, finding a non-zero reward is exponentially more difficult with increasing task horizon or action dimensionality. This puts many real-world tasks out of practical reach of RL methods. In this work, we use demonstrations to overcome the exploration problem and successfully learn to perform long-horizon, multi-step robotics tasks with continuous control such as stacking blocks with a robot arm. Our method, which builds on top of Deep Deterministic Policy Gradients and Hindsight Experience Replay, provides an order of magnitude of speedup over RL on simulated robotics tasks. It is simple to implement and makes only the additional assumption that we can collect a small set of demonstrations. Furthermore, our method is able to solve tasks not solvable by either RL or behavior cloning alone, and often ends up outperforming the demonstrator policy.