 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAttention-Based Map Encoding for Learning Generalized Legged Locomotion
Jun 11, 2025Dynamic locomotion of legged robots is a critical yet challenging topic in expanding the operational range of mobile robots. It requires precise planning when possible footholds are sparse, robustness against uncertainties and disturbances, and generalizability across diverse terrains. While traditional model-based controllers excel at planning on complex terrains, they struggle with real-world uncertainties. Learning-based controllers offer robustness to such uncertainties but often lack precision on terrains with sparse steppable areas. Hybrid methods achieve enhanced robustness on sparse terrains by combining both methods but are computationally demanding and constrained by the inherent limitations of model-based planners. To achieve generalized legged locomotion on diverse terrains while preserving the robustness of learning-based controllers, this paper proposes to learn an attention-based map encoding conditioned on robot proprioception, which is trained as part of the end-to-end controller using reinforcement learning. We show that the network learns to focus on steppable areas for future footholds when the robot dynamically navigates diverse and challenging terrains. We synthesize behaviors that exhibit robustness against uncertainties while enabling precise and agile traversal of sparse terrains. Additionally, our method offers a way to interpret the topographical perception of a neural network. We have trained two controllers for a 12-DoF quadrupedal robot and a 23-DoF humanoid robot respectively and tested the resulting controllers in the real world under various challenging indoor and outdoor scenarios, including ones unseen during training.
Improving Long-Range Navigation with Spatially-Enhanced Recurrent Memory via End-to-End Reinforcement Learning
Jun 06, 2025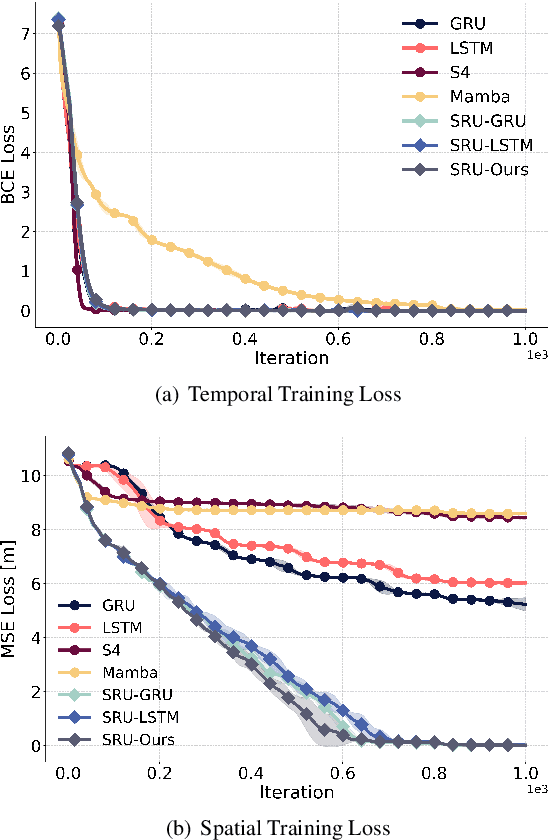
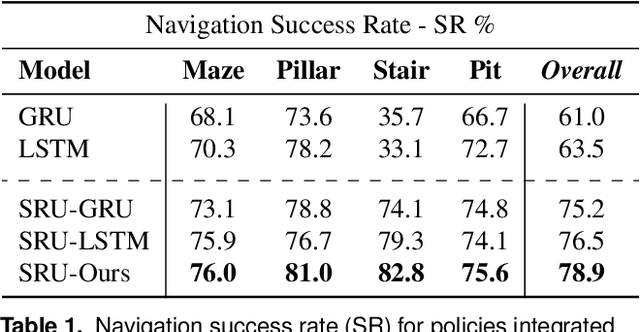
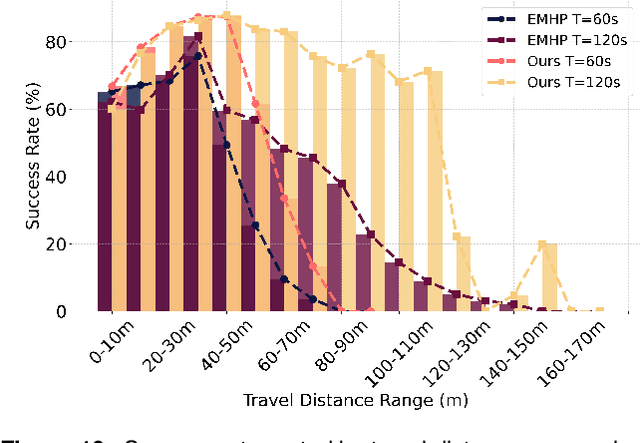
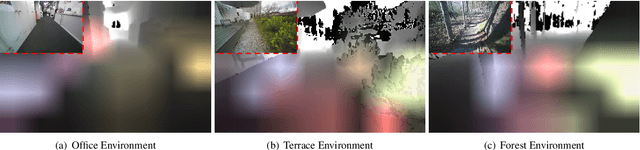
Recent advancements in robot navigation, especially with end-to-end learning approaches like reinforcement learning (RL), have shown remarkable efficiency and effectiveness. Yet, successful navigation still relies on two key capabilities: mapping and planning, whether explicit or implicit. Classical approaches use explicit mapping pipelines to register ego-centric observations into a coherent map frame for the planner. In contrast, end-to-end learning achieves this implicitly, often through recurrent neural networks (RNNs) that fuse current and past observations into a latent space for planning. While architectures such as LSTM and GRU capture temporal dependencies, our findings reveal a key limitation: their inability to perform effective spatial memorization. This skill is essential for transforming and integrating sequential observations from varying perspectives to build spatial representations that support downstream planning. To address this, we propose Spatially-Enhanced Recurrent Units (SRUs), a simple yet effective modification to existing RNNs, designed to enhance spatial memorization capabilities. We introduce an attention-based architecture with SRUs, enabling long-range navigation using a single forward-facing stereo camera. Regularization techniques are employed to ensure robust end-to-end recurrent training via RL. Experimental results show our approach improves long-range navigation by 23.5% compared to existing RNNs. Furthermore, with SRU memory, our method outperforms the RL baseline with explicit mapping and memory modules, achieving a 29.6% improvement in diverse environments requiring long-horizon mapping and memorization. Finally, we address the sim-to-real gap by leveraging large-scale pretraining on synthetic depth data, enabling zero-shot transfer to diverse and complex real-world environments.
Learning coordinated badminton skills for legged manipulators
May 29, 2025Coordinating the motion between lower and upper limbs and aligning limb control with perception are substantial challenges in robotics, particularly in dynamic environments. To this end, we introduce an approach for enabling legged mobile manipulators to play badminton, a task that requires precise coordination of perception, locomotion, and arm swinging. We propose a unified reinforcement learning-based control policy for whole-body visuomotor skills involving all degrees of freedom to achieve effective shuttlecock tracking and striking. This policy is informed by a perception noise model that utilizes real-world camera data, allowing for consistent perception error levels between simulation and deployment and encouraging learned active perception behaviors. Our method includes a shuttlecock prediction model, constrained reinforcement learning for robust motion control, and integrated system identification techniques to enhance deployment readiness. Extensive experimental results in a variety of environments validate the robot's capability to predict shuttlecock trajectories, navigate the service area effectively, and execute precise strikes against human players, demonstrating the feasibility of using legged mobile manipulators in complex and dynamic sports scenarios.
* Science Robotics DOI: 10.1126/scirobotics.adu3922
Motion Priors Reimagined: Adapting Flat-Terrain Skills for Complex Quadruped Mobility
May 21, 2025Reinforcement learning (RL)-based legged locomotion controllers often require meticulous reward tuning to track velocities or goal positions while preserving smooth motion on various terrains. Motion imitation methods via RL using demonstration data reduce reward engineering but fail to generalize to novel environments. We address this by proposing a hierarchical RL framework in which a low-level policy is first pre-trained to imitate animal motions on flat ground, thereby establishing motion priors. A subsequent high-level, goal-conditioned policy then builds on these priors, learning residual corrections that enable perceptive locomotion, local obstacle avoidance, and goal-directed navigation across diverse and rugged terrains. Simulation experiments illustrate the effectiveness of learned residuals in adapting to progressively challenging uneven terrains while still preserving the locomotion characteristics provided by the motion priors. Furthermore, our results demonstrate improvements in motion regularization over baseline models trained without motion priors under similar reward setups. Real-world experiments with an ANYmal-D quadruped robot confirm our policy's capability to generalize animal-like locomotion skills to complex terrains, demonstrating smooth and efficient locomotion and local navigation performance amidst challenging terrains with obstacles.
Parkour in the Wild: Learning a General and Extensible Agile Locomotion Policy Using Multi-expert Distillation and RL Fine-tuning
May 16, 2025Legged robots are well-suited for navigating terrains inaccessible to wheeled robots, making them ideal for applications in search and rescue or space exploration. However, current control methods often struggle to generalize across diverse, unstructured environments. This paper introduces a novel framework for agile locomotion of legged robots by combining multi-expert distillation with reinforcement learning (RL) fine-tuning to achieve robust generalization. Initially, terrain-specific expert policies are trained to develop specialized locomotion skills. These policies are then distilled into a unified foundation policy via the DAgger algorithm. The distilled policy is subsequently fine-tuned using RL on a broader terrain set, including real-world 3D scans. The framework allows further adaptation to new terrains through repeated fine-tuning. The proposed policy leverages depth images as exteroceptive inputs, enabling robust navigation across diverse, unstructured terrains. Experimental results demonstrate significant performance improvements over existing methods in synthesizing multi-terrain skills into a single controller. Deployment on the ANYmal D robot validates the policy's ability to navigate complex environments with agility and robustness, setting a new benchmark for legged robot locomotion.
TartanGround: A Large-Scale Dataset for Ground Robot Perception and Navigation
May 15, 2025We present TartanGround, a large-scale, multi-modal dataset to advance the perception and autonomy of ground robots operating in diverse environments. This dataset, collected in various photorealistic simulation environments includes multiple RGB stereo cameras for 360-degree coverage, along with depth, optical flow, stereo disparity, LiDAR point clouds, ground truth poses, semantic segmented images, and occupancy maps with semantic labels. Data is collected using an integrated automatic pipeline, which generates trajectories mimicking the motion patterns of various ground robot platforms, including wheeled and legged robots. We collect 910 trajectories across 70 environments, resulting in 1.5 million samples. Evaluations on occupancy prediction and SLAM tasks reveal that state-of-the-art methods trained on existing datasets struggle to generalize across diverse scenes. TartanGround can serve as a testbed for training and evaluation of a broad range of learning-based tasks, including occupancy prediction, SLAM, neural scene representation, perception-based navigation, and more, enabling advancements in robotic perception and autonomy towards achieving robust models generalizable to more diverse scenarios. The dataset and codebase for data collection will be made publicly available upon acceptance. Webpage: https://tartanair.org/tartanground
FOCI: Trajectory Optimization on Gaussian Splats
May 13, 20253D Gaussian Splatting (3DGS) has recently gained popularity as a faster alternative to Neural Radiance Fields (NeRFs) in 3D reconstruction and view synthesis methods. Leveraging the spatial information encoded in 3DGS, this work proposes FOCI (Field Overlap Collision Integral), an algorithm that is able to optimize trajectories directly on the Gaussians themselves. FOCI leverages a novel and interpretable collision formulation for 3DGS using the notion of the overlap integral between Gaussians. Contrary to other approaches, which represent the robot with conservative bounding boxes that underestimate the traversability of the environment, we propose to represent the environment and the robot as Gaussian Splats. This not only has desirable computational properties, but also allows for orientation-aware planning, allowing the robot to pass through very tight and narrow spaces. We extensively test our algorithm in both synthetic and real Gaussian Splats, showcasing that collision-free trajectories for the ANYmal legged robot that can be computed in a few seconds, even with hundreds of thousands of Gaussians making up the environment. The project page and code are available at https://rffr.leggedrobotics.com/works/foci/
CompSLAM: Complementary Hierarchical Multi-Modal Localization and Mapping for Robot Autonomy in Underground Environments
May 10, 2025Robot autonomy in unknown, GPS-denied, and complex underground environments requires real-time, robust, and accurate onboard pose estimation and mapping for reliable operations. This becomes particularly challenging in perception-degraded subterranean conditions under harsh environmental factors, including darkness, dust, and geometrically self-similar structures. This paper details CompSLAM, a highly resilient and hierarchical multi-modal localization and mapping framework designed to address these challenges. Its flexible architecture achieves resilience through redundancy by leveraging the complementary nature of pose estimates derived from diverse sensor modalities. Developed during the DARPA Subterranean Challenge, CompSLAM was successfully deployed on all aerial, legged, and wheeled robots of Team Cerberus during their competition-winning final run. Furthermore, it has proven to be a reliable odometry and mapping solution in various subsequent projects, with extensions enabling multi-robot map sharing for marsupial robotic deployments and collaborative mapping. This paper also introduces a comprehensive dataset acquired by a manually teleoperated quadrupedal robot, covering a significant portion of the DARPA Subterranean Challenge finals course. This dataset evaluates CompSLAM's robustness to sensor degradations as the robot traverses 740 meters in an environment characterized by highly variable geometries and demanding lighting conditions. The CompSLAM code and the DARPA SubT Finals dataset are made publicly available for the benefit of the robotics community
DAPPER: Discriminability-Aware Policy-to-Policy Preference-Based Reinforcement Learning for Query-Efficient Robot Skill Acquisition
May 09, 2025



Preference-based Reinforcement Learning (PbRL) enables policy learning through simple queries comparing trajectories from a single policy. While human responses to these queries make it possible to learn policies aligned with human preferences, PbRL suffers from low query efficiency, as policy bias limits trajectory diversity and reduces the number of discriminable queries available for learning preferences. This paper identifies preference discriminability, which quantifies how easily a human can judge which trajectory is closer to their ideal behavior, as a key metric for improving query efficiency. To address this, we move beyond comparisons within a single policy and instead generate queries by comparing trajectories from multiple policies, as training them from scratch promotes diversity without policy bias. We propose Discriminability-Aware Policy-to-Policy Preference-Based Efficient Reinforcement Learning (DAPPER), which integrates preference discriminability with trajectory diversification achieved by multiple policies. DAPPER trains new policies from scratch after each reward update and employs a discriminator that learns to estimate preference discriminability, enabling the prioritized sampling of more discriminable queries. During training, it jointly maximizes the preference reward and preference discriminability score, encouraging the discovery of highly rewarding and easily distinguishable policies. Experiments in simulated and real-world legged robot environments demonstrate that DAPPER outperforms previous methods in query efficiency, particularly under challenging preference discriminability conditions.
Learned Perceptive Forward Dynamics Model for Safe and Platform-aware Robotic Navigation
Apr 29, 2025



Ensuring safe navigation in complex environments requires accurate real-time traversability assessment and understanding of environmental interactions relative to the robot`s capabilities. Traditional methods, which assume simplified dynamics, often require designing and tuning cost functions to safely guide paths or actions toward the goal. This process is tedious, environment-dependent, and not generalizable. To overcome these issues, we propose a novel learned perceptive Forward Dynamics Model (FDM) that predicts the robot`s future state conditioned on the surrounding geometry and history of proprioceptive measurements, proposing a more scalable, safer, and heuristic-free solution. The FDM is trained on multiple years of simulated navigation experience, including high-risk maneuvers, and real-world interactions to incorporate the full system dynamics beyond rigid body simulation. We integrate our perceptive FDM into a zero-shot Model Predictive Path Integral (MPPI) planning framework, leveraging the learned mapping between actions, future states, and failure probability. This allows for optimizing a simplified cost function, eliminating the need for extensive cost-tuning to ensure safety. On the legged robot ANYmal, the proposed perceptive FDM improves the position estimation by on average 41% over competitive baselines, which translates into a 27% higher navigation success rate in rough simulation environments. Moreover, we demonstrate effective sim-to-real transfer and showcase the benefit of training on synthetic and real data. Code and models are made publicly available under https://github.com/leggedrobotics/fdm.