 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExT: Towards Scalable Autonomous Excavation via Large-Scale Multi-Task Pretraining and Fine-Tuning
Sep 18, 2025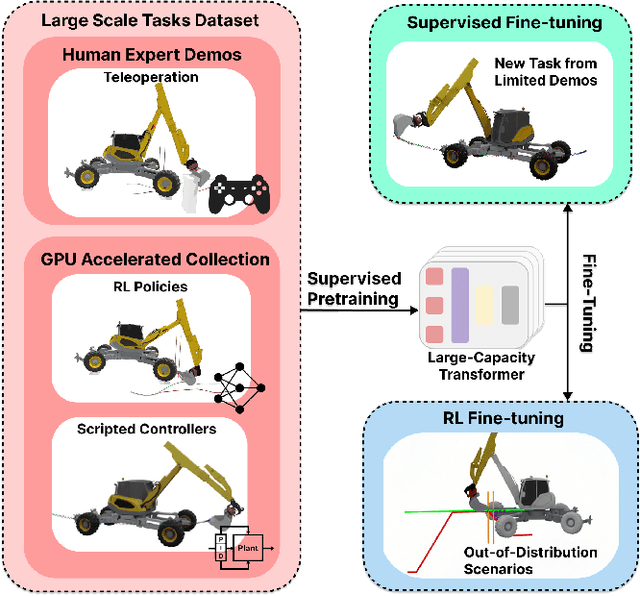
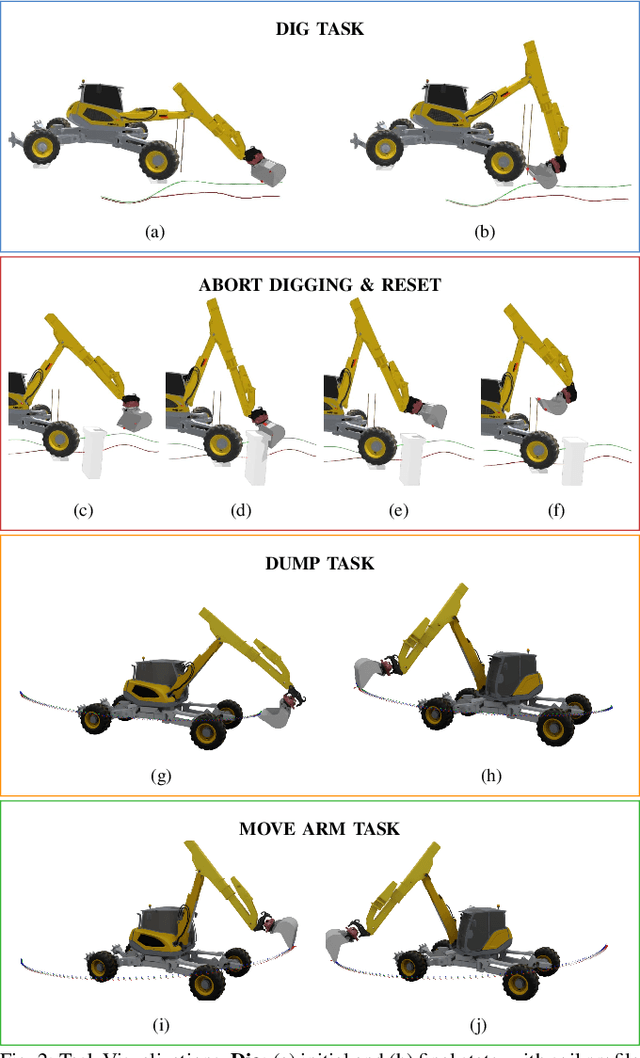
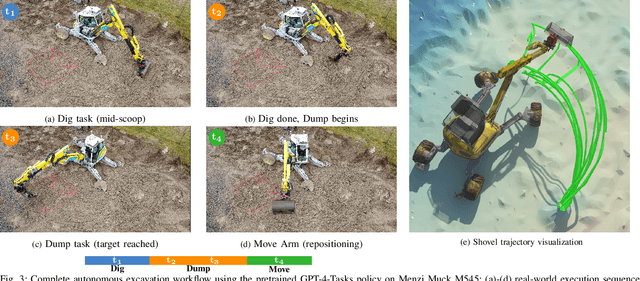
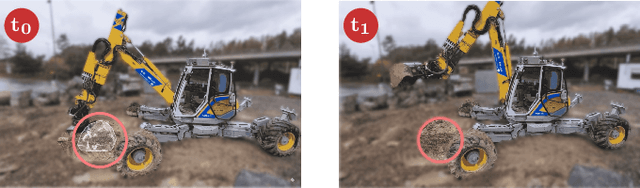
Scaling up the deployment of autonomous excavators is of great economic and societal importance. Yet it remains a challenging problem, as effective systems must robustly handle unseen worksite conditions and new hardware configurations. Current state-of-the-art approaches rely on highly engineered, task-specific controllers, which require extensive manual tuning for each new scenario. In contrast, recent advances in large-scale pretrained models have shown remarkable adaptability across tasks and embodiments in domains such as manipulation and navigation, but their applicability to heavy construction machinery remains largely unexplored. In this work, we introduce ExT, a unified open-source framework for large-scale demonstration collection, pretraining, and fine-tuning of multitask excavation policies. ExT policies are first trained on large-scale demonstrations collected from a mix of experts, then fine-tuned either with supervised fine-tuning (SFT) or reinforcement learning fine-tuning (RLFT) to specialize to new tasks or operating conditions. Through both simulation and real-world experiments, we show that pretrained ExT policies can execute complete excavation cycles with centimeter-level accuracy, successfully transferring from simulation to real machine with performance comparable to specialized single-task controllers. Furthermore, in simulation, we demonstrate that ExT's fine-tuning pipelines allow rapid adaptation to new tasks, out-of-distribution conditions, and machine configurations, while maintaining strong performance on previously learned tasks. These results highlight the potential of ExT to serve as a foundation for scalable and generalizable autonomous excavation.
ETHcavation: A Dataset and Pipeline for Panoptic Scene Understanding and Object Tracking in Dynamic Construction Environments
Oct 05, 2024



Construction sites are challenging environments for autonomous systems due to their unstructured nature and the presence of dynamic actors, such as workers and machinery. This work presents a comprehensive panoptic scene understanding solution designed to handle the complexities of such environments by integrating 2D panoptic segmentation with 3D LiDAR mapping. Our system generates detailed environmental representations in real-time by combining semantic and geometric data, supported by Kalman Filter-based tracking for dynamic object detection. We introduce a fine-tuning method that adapts large pre-trained panoptic segmentation models for construction site applications using a limited number of domain-specific samples. For this use case, we release a first-of-its-kind dataset of 502 hand-labeled sample images with panoptic annotations from construction sites. In addition, we propose a dynamic panoptic mapping technique that enhances scene understanding in unstructured environments. As a case study, we demonstrate the system's application for autonomous navigation, utilizing real-time RRT* for reactive path planning in dynamic scenarios. The dataset (https://leggedrobotics.github.io/panoptic-scene-understanding.github.io/) and code (https://github.com/leggedrobotics/rsl_panoptic_mapping) for training and deployment are publicly available to support future research.
Towards Autonomous Excavation Planning
Aug 22, 2023



Excavation plans are crucial in construction projects, dictating the dirt disposal strategy and excavation sequence based on the final geometry and machinery available. While most construction processes rely heavily on coarse sequence planning and local execution planning driven by human expertise and intuition, fully automated planning tools are notably absent from the industry. This paper introduces a fully autonomous excavation planning system. Initially, the site is mapped, followed by user selection of the desired excavation geometry. The system then invokes a global planner to determine the sequence of poses for the excavator, ensuring complete site coverage. For each pose, a local excavation planner decides how to move the soil around the machine, and a digging planner subsequently dictates the sequence of digging trajectories to complete a patch. We showcased our system by autonomously excavating the largest pit documented so far, achieving an average digging cycle time of roughly 30 seconds, comparable to the one of a human operator.